

4.4. Метод кинематических диаграмм (метод графического дифференцирования)
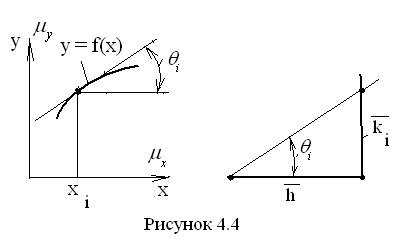
Основой метода служит известное положение математики, согласно которому производная функции, заданной в виде графика, в какой-либо её точке численно равна тангенсу угла наклона касательной, проведённой в этой точке к графику функции, то есть
![]() .
.
Так как теория механизмов и машин имеет дело с именованными числами, то при определении величины тангенса необходимо учитывать масштабы по осям координат графика функции (рис. 4.4), тогда
 .
.
Выберем
горизонтальный отрезок произвольной
длины и проведём из его левого конца
наклонную прямую, параллельную
касательной, а из правого конца –
вертикальную прямую до пересечения с
наклонной. Вычислим длину отрезка,
полученного на вертикали и обозначенного
на рис. 4.4 буквой
![]() .
Построенный треугольник является
прямоугольным с углом против вертикального
катета, равным
.
Построенный треугольник является
прямоугольным с углом против вертикального
катета, равным
![]()
 .
Поэтому, записав из треугольника
.
Поэтому, записав из треугольника
 и подставив это отношение в предыдущее
выражение, получаем
и подставив это отношение в предыдущее
выражение, получаем
 .
.
В
правой части этого выражения переменной
величиной является только
![]() ,
остальные образуют постоянное число,
которое можно считать масштабом, то
есть
,
остальные образуют постоянное число,
которое можно считать масштабом, то
есть
 .
.
Таким
образом мы убедились, что отрезок
в масштабе
![]() выражает производную в данной точке
графика.
выражает производную в данной точке
графика.
Для
применения рассмотренной методики
необходимо предварительно построить
график или функции положения механизма,
или график аналога скорости. Чтобы
построить график производной, необходимо
на продолжении оси абсцисс этого графика
в левую сторону от оси ординат выбрать
произвольный отрезок
![]() и на нём строить все треугольники,
необходимые для определения отрезков
.
Все эти отрезки получаются на оси
ординат, но каждый из них необходимо
разместить на ординатной прямой
соответствующего номера, а их концы
соединить плавной кривой. Эта процедура
даст искомый график.
и на нём строить все треугольники,
необходимые для определения отрезков
.
Все эти отрезки получаются на оси
ординат, но каждый из них необходимо
разместить на ординатной прямой
соответствующего номера, а их концы
соединить плавной кривой. Эта процедура
даст искомый график.
Вопросы для самопроверки
1. Сформулируйте задачи кинематического анализа механизмов с низшими парами.
2. Перечислите методы исследования кинематики механизмов.
3. Что должно быть задано для исследования кинематики механизма?
4. В чём заключается сущность аналитического метода исследования кинематики?
5. Что называется масштабом в ТММ?
6. Что такое разметка механизма?
7. Для чего строится разметка?
8. Как определяются скорость и ускорение конца кривошипа?
9. Запишите векторные уравнения для построения планов скоростей и ускорений и объясните их составляющие. Какое правило механики положено в основу этих уравнений?
10. Как определяются скорости и ускорения центра масс шатуна?
11. Как определить угловые скорость и ускорение стержневого звена?
12. Какое правило математики положено в основу графического дифференцирования функции, заданной в виде графика?
13. Приведите пример построении графика производной при заданном графике функции.
14. Как определяются масштабы по осям координат при построении графика производной?
5. Кинетостатика механизмов
В этом разделе изучаются силы, действующие на звенья механизмов. Из-за ограниченности объёма данной работы здесь рассматриваются только механизмы с низшими кинематическими парами. Задачами этого раздела являются следующие.
1)Определение реакций в кинематических парах механизмов с целью их использования в дальнейшем для прочностных расчётов звеньев и элементов кинематических пар, сил трения, КПД и т. д.
2)Определение уравновешивающей силы или уравновешивающего момента на ведущем звене.
Для решения этих задач необходимо знать
1)кинематическую схему механизма и кинематические размеры его звеньев.
2)массы и моменты инерции звеньев.
3)внешние силы, действующие в машинах (применительно к технологическим машинам должны быть известны силы полезного, т. е. технологического сопротивления, применительно к машинам-двигателям необходимо знать движущие силы).