

3.7. Подрез зуба колеса и его предотвращение
Подрезом зуба называется пересечение траектории точки A. лежащей на граничной прямой головок исходного контура (см. рис. 3.8), с эвольвентой зуба нарезаемого колеса. В результате этого происходит утонение ножки зуба в его опасном сечении при работе на изгиб (рис.3.9) и уменьшение плавности работы передачи из-за сокращения эвольвентной части зуба.
Подрез,
как правило, недопустим. О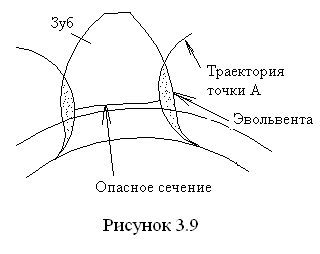 н
наступает при количестве зубьев колеса,
которое меньше некоторого значения,
называемого минимальным
числом зубьев.
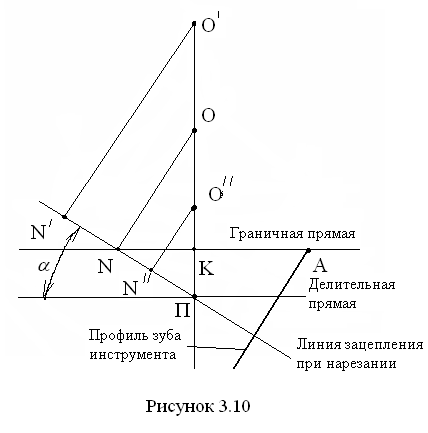
Для определения этого числа зубьев
обратимся к рис. 3.10.
н
наступает при количестве зубьев колеса,
которое меньше некоторого значения,
называемого минимальным
числом зубьев.
Для определения этого числа зубьев
обратимся к рис. 3.10.
Если
число зубьев нарезаемого колеса
достаточно велико,
![]() ,
то конец N'
теоретической линии зацепления при
нарезании располагается выше граничной
прямой головок инструмента, и подрез
отсутствует. Если число зубьев нарезаемого
колеса мало
,
то конец N'
теоретической линии зацепления при
нарезании располагается выше граничной
прямой головок инструмента, и подрез
отсутствует. Если число зубьев нарезаемого
колеса мало
![]() ,
то конец N''
теоретической линии зацепления расположен
ниже граничной прямой головок, и подрез
есть. Наконец, если граничная прямая
головок проходит точно через границу
теоретической линии зацепления, то
подреза ещё нет, т. е. имеет место некое
пограничное состояние. Число зубьев
колеса, соответствующее этому состоянию,
равно минимальному, т. е.
,
то конец N''
теоретической линии зацепления расположен
ниже граничной прямой головок, и подрез
есть. Наконец, если граничная прямая
головок проходит точно через границу
теоретической линии зацепления, то
подреза ещё нет, т. е. имеет место некое
пограничное состояние. Число зубьев
колеса, соответствующее этому состоянию,
равно минимальному, т. е.
![]() .
Выразим отрезок KП
на межосевой линии двояким образом. С
одной стороны он равен
,
с другой, последовательно рассмат-ривая
треугольники ПКN
и ПОN,
имеем
.
Выразим отрезок KП
на межосевой линии двояким образом. С
одной стороны он равен
,
с другой, последовательно рассмат-ривая
треугольники ПКN
и ПОN,
имеем
 .
.
П
 риравнивая
правую часть полученного выражения к
и, решая новое равенство относительно
,
получаем
риравнивая
правую часть полученного выражения к
и, решая новое равенство относительно
,
получаем
 .
.
Стандартным параметрам исходного контура соответствует = 17.
П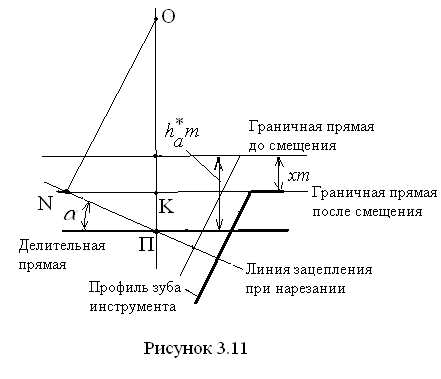 ри
необходимости изготовления колеса с
числом зубьев, меньшем минимального, и
предотвращения подреза следует
инструментальную рейку сместить от
центра колеса на такую величину, при
которой её граничная прямая головок
пройдёт через точку N
линии зацепления (рис. 3.11). Определим
необходимую величину смещения. Согласно
рис. 3.11 имеем с одной стороны
ри
необходимости изготовления колеса с
числом зубьев, меньшем минимального, и
предотвращения подреза следует
инструментальную рейку сместить от
центра колеса на такую величину, при
которой её граничная прямая головок
пройдёт через точку N
линии зацепления (рис. 3.11). Определим
необходимую величину смещения. Согласно
рис. 3.11 имеем с одной стороны
![]() ,
,
и
с другой стороны
![]() или
или
![]() .
.
Так
как
 ,
то, приравнивая правые части этих
выражений и заменив
,
то, приравнивая правые части этих
выражений и заменив
![]() на
на
 ,
после несложных преобразований находим
искомый коэффициент смещения:
,
после несложных преобразований находим
искомый коэффициент смещения:
 .
.
Для
стандартных размеров исходного контура
![]() ,
поэтому получаем:
,
поэтому получаем:
 .
Из этой формулы следует, что если число
зубьев колеса меньше минимального, то
полученный положительный коэффициент
смещения означает, что для предотвращения
подреза инструмент должен быть смещён
в сторону от центра колеса. Если число
зубьев колеса больше минимального, то
коэффициент смещения получается
отрицательным и указывает на допустимое
смещение инструмента к центру колеса,
при котором не будет подреза.
.
Из этой формулы следует, что если число
зубьев колеса меньше минимального, то
полученный положительный коэффициент
смещения означает, что для предотвращения
подреза инструмент должен быть смещён
в сторону от центра колеса. Если число
зубьев колеса больше минимального, то
коэффициент смещения получается
отрицательным и указывает на допустимое
смещение инструмента к центру колеса,
при котором не будет подреза.
3.8. Качественные характеристики эвольвентного зацепления Коэффициент перекрытия
Коэффициентом
перекрытия называется
отношение длины активной линии зацепления
к основному шагу зубчатого колеса, он
обозначается
![]() и определяется
отношением
и определяется
отношением
 .
.
Передача движения в зубчатом зацеплении происходит таким образом, что, прежде чем предыдущая пара зубьев выйдет из зацепления (из контакта), последующая должна войти в зацепление (в контакт). Чем раньше она вступит в зацепление, тем более плавно работает передача. Количественной характеристикой этого качества и является коэффициент перекрытия, т. е. он, по существу, характеризует плавность работы зубчатой передачи. Обычно величина коэффициента перекрытия заключена между 1 и 2, при этом минимальное значение не должно быть меньше 1,1. Схематически соотношение между длиной активной лини зацепления и основным шагом показано на рис. 3.12. Точка контакта профилей зубьев перемещается вдоль активной линии зацепления от точки H1 к точке H2. Основной шаг короче активной линии зацепления, поэтому в пределах этой линии работают то одна, то две пары зубьев. Если отложить, как показано на рис. 3.12, основной шаг pb от точек H1 и H2, то отрезок H1H2 будет разделён на три части. Две крайние части соответствуют зонам двухпарного зацепления зубьев, а средняя – зоне однопарного зацепления. Чем короче средняя зона, тем плавнее работает зубчатая передача, так как суммарная длина двух крайних участков становится длиннее.