

2. Кинематика зубчатых механизмов
Зубчатые механизмы служат для преобразования вращательного движения с одновременным преобразованием сил.
2.1. Понятие о передаточном отношении
Основной характеристикой преобразования вращательного движения зубчатых механизмов является передаточное отношение – отношение угловой скорости или частоты вращения ведущего звена механизма к угловой скорости или частоте вращения ведомого звена.
Передаточное
отношение обозначается латинской буквой
«![]() »
с индексами. Индексы указывают на то,
от какого колеса (1-й индекс) к какому
(2-й индекс) вычисляется передаточное
отношение. Например,
12
обозначает передаточное отношение от
первого колеса ко второму. Согласно
определению
»
с индексами. Индексы указывают на то,
от какого колеса (1-й индекс) к какому
(2-й индекс) вычисляется передаточное
отношение. Например,
12
обозначает передаточное отношение от
первого колеса ко второму. Согласно
определению
![]() или
или
![]() ,
так как
,
так как
 .
.
Поскольку
21=![]() 2/
1,
то
12·
21=1,
и
21=1/
12.
2/
1,
то
12·
21=1,
и
21=1/
12.
Если в механизме передаточное отношение больше единицы, то угловая скорость ведущего колеса больше, чем ведомого, и такой механизм называется редуктором. В противном случае механизм называется мультипликатором. Редукторы в машиностроении применяются в большинстве случаев из-за необходимости уменьшения скоростей движения исполнительных органов машин и увеличения на них усилий. Мультипликаторы применяются реже и не являются силовыми устройствами.
При
совпадении направлений вращения ведущего
и ведомого колёс передаточное отношение
имеет положительный знак, т. е.
![]() ,
если направления вращений не совпадают,
то
,
если направления вращений не совпадают,
то
![]() .
Заметим, что знак имеет смысл при
параллельных осях колёс.
.
Заметим, что знак имеет смысл при
параллельных осях колёс.
2.2. Передаточное отношение простой зубчатой передачи
П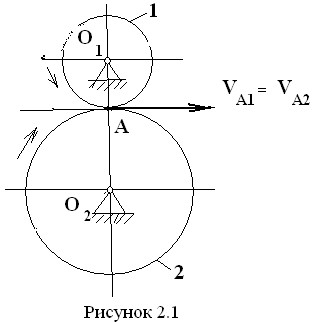 ростая
зубчатая передача – трехзвенный зубчатый
механизм, состоящий из двух зубчатых
колес и стойки. В зубчатых колесах
существуют окружности, которые при
передаче движения перекатываются друг
по другу без скольжения. Эти окружности
называются центроидными,
т. к. каждая из них является
геометрическим местом центров мгновенного
относительного вращения
другой
окружности.
На рис. 2.1 показана такая передача. В ней
колесо 1 вращается вокруг центра O1,
а колесо 2 – вокруг центра O2.
Их центроидные окружности касаются
друг друга в точке A.
Направления вращения колёс указаны
стрелками. В точке A
окружные скорости колёс одинаковы и
определяются произведением угловых
скоростей колёс на радиусы центроидных
окружностей
ростая
зубчатая передача – трехзвенный зубчатый
механизм, состоящий из двух зубчатых
колес и стойки. В зубчатых колесах
существуют окружности, которые при
передаче движения перекатываются друг
по другу без скольжения. Эти окружности
называются центроидными,
т. к. каждая из них является
геометрическим местом центров мгновенного
относительного вращения
другой
окружности.
На рис. 2.1 показана такая передача. В ней
колесо 1 вращается вокруг центра O1,
а колесо 2 – вокруг центра O2.
Их центроидные окружности касаются
друг друга в точке A.
Направления вращения колёс указаны
стрелками. В точке A
окружные скорости колёс одинаковы и
определяются произведением угловых
скоростей колёс на радиусы центроидных
окружностей
![]() 1
и
2,
т. е. соответственно VA1=
1·
1
и VA2=
2·
2.
А так как эти скорости равны, то имеет
место равенство:
1
и
2,
т. е. соответственно VA1=
1·
1
и VA2=
2·
2.
А так как эти скорости равны, то имеет
место равенство:
![]() ,
,
из которого следует, что передаточное отношение может быть выражено через отношение радиусов центроидных окружностей, то есть
 .
.
Знаки «+» и «–» перед отношением радиусов появились в связи с тем, что в отличие от угловых скоростей радиусы не могут быть отрицательными, и знак «–» относится к данной схеме, а знак «+» имел бы место при внутреннем зацеплении колёс.
Если центроидными окружностями являются делительные окружности, то их радиусы можно выразить следующим образом. Длины центроидных окружностей S1 первого колеса и S2 второго колеса определяются выражениями соответственно:
S1
= 2·π·
1
= p·![]() 1
и S2
=2·π·
2
= p·
2,
1
и S2
=2·π·
2
= p·
2,
где p – шаг колёс по делительной окружности, т. е. расстояние между одноимёнными точками двух соседних зубьев, 1 и 2 – числа зубьев данных колёс, (то же, что число шагов).
Решим эти выражения относительно радиусов 1 и 2:
1 = p·z1/(2·π), 2 = p·z2/(2·π).
Отношение шага по делительной окружности к числу π называется модулем зубчатого колеса, который обозначается латинской буквой m. Модуль, как и шаг, является единым для колёс, находящихся в зацеплении. Он измеряется в миллиметрах, и через него выражаются все размеры зубьев (величины модулей определяются стандартом). Подставив теперь вместо радиусов в ранее записанном выражении передаточного отношения их найденные выше значения, после сокращения на 2 и на m, получим окончательно
 .
.
То есть, передаточное отношение простой зубчатой передачи может быть выражено как обратное отношение чисел зубьев колёс. Это правило справедливо при всех способах расположения осей колёс в пространстве.