

Определение скоростей и ускорений
Планом скоростей (ускорений) механизма называется пучок векторов, выходящих из одной точки (полюса плана), каждый из которых в некотором масштабе изображает вектор абсолютной скорости (абсолютного ускорения) какой-либо точки механизма, а отрезки, соединяющие их концы, изображают векторы относительных скоростей (относительных ускорений).
Построение плана скоростей сводится к реализации известного положения теоретической механики, согласно которому при плоско-параллельном движении твёрдого тела (звена) скорость любой его точки равна векторной сумме скорости в поступательном переносном движении вместе с другой точкой, принятой в качестве полюса, и скорости её в относительном вращательном движении относительно этого полюса.
Р в исследуемом положении. Прежде необходимо
определить параметры движения точки
А. Её скорость по величине равна
произведению угловой скорости
в исследуемом положении. Прежде необходимо
определить параметры движения точки
А. Её скорость по величине равна
произведению угловой скорости
![]() кривошипа 1 на его радиус
,
т. е.
кривошипа 1 на его радиус
,
т. е.
![]() и направлена перпендикулярно кривошипу
в сторону движения точки А. Ускорение
точки А по величине равно произведению
квадрата угловой скорости кривошипа
также на его радиус, т. е.
и направлена перпендикулярно кривошипу
в сторону движения точки А. Ускорение
точки А по величине равно произведению
квадрата угловой скорости кривошипа
также на его радиус, т. е.
![]() и направлено от точки А к точке О, так
как совпадает с нормальной составляющей
полного ускорения точки А из-за равенства
нулю тангенциальной составляющей
ускорения (угловое ускорение кривошипа
принимается равным нулю). Точка А
принадлежит не только кривошипу, но и
шатуну 2 и принимается в качестве полюса
относительного вращения точки В. Скорость
точки В определяется векторным равенством
и направлено от точки А к точке О, так
как совпадает с нормальной составляющей
полного ускорения точки А из-за равенства
нулю тангенциальной составляющей
ускорения (угловое ускорение кривошипа
принимается равным нулю). Точка А
принадлежит не только кривошипу, но и
шатуну 2 и принимается в качестве полюса
относительного вращения точки В. Скорость
точки В определяется векторным равенством
![]() ,
т. е. скорость точки В равна скорости
точки А плюс скорость точки В относительно
точки А. В этом равенстве первое слагаемое
правой части известно по величине и по
направлению, второе слагаемое направлено
перпендикулярно шатуну 2 в данном
положении, т. е. известно по направлению,
и, наконец, вектор левой части направлен
параллельно направляющим ползуна. При
этих условиях треугольник скоростей
легко строится в предварительно выбранном
масштабе
,
т. е. скорость точки В равна скорости
точки А плюс скорость точки В относительно
точки А. В этом равенстве первое слагаемое
правой части известно по величине и по
направлению, второе слагаемое направлено
перпендикулярно шатуну 2 в данном
положении, т. е. известно по направлению,
и, наконец, вектор левой части направлен
параллельно направляющим ползуна. При
этих условиях треугольник скоростей
легко строится в предварительно выбранном
масштабе
 .
.
Построение
плана ускорений производится в той же
последовательности, что и план скоростей.
При этом используется векторное равенство
![]() ,
в котором первый вектор правой части
известен полностью, второй неизвестен
ни по величине, ни по направлению. Вектор
левой части известен по направлению –
он направлен параллельно направляющим
ползуна. В этих условиях треугольник
ускорений не строится. Разложим вектор
относительного ускорения на две
составляющих, согласно равенству
,
в котором первый вектор правой части
известен полностью, второй неизвестен
ни по величине, ни по направлению. Вектор
левой части известен по направлению –
он направлен параллельно направляющим
ползуна. В этих условиях треугольник
ускорений не строится. Разложим вектор
относительного ускорения на две
составляющих, согласно равенству
![]() .
Первое слагаемое представляет собой
относительное нормальное ускорение,
направленное от точки В к точке А и
равное по величине частному от деления
квадрата относительной скорости на
длину шатуна, т. е.
.
Первое слагаемое представляет собой
относительное нормальное ускорение,
направленное от точки В к точке А и
равное по величине частному от деления
квадрата относительной скорости на
длину шатуна, т. е.
 .
Второе слагаемое, относительное
тангенциальное ускорение направлено
перпендикулярно шатуну 2 и неизвестно
по величине. Теперь план ускорений
строится без затруднений с применением
заранее выбранного
масштаба
.
Второе слагаемое, относительное
тангенциальное ускорение направлено
перпендикулярно шатуну 2 и неизвестно
по величине. Теперь план ускорений
строится без затруднений с применением
заранее выбранного
масштаба
 .
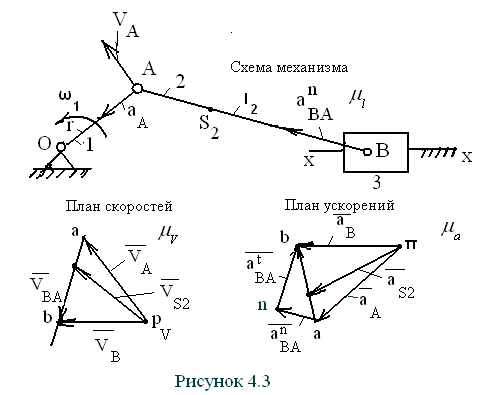
Планы скоростей и ускорений данного
механизма представлены на рис. 4.3.
.
Планы скоростей и ускорений данного
механизма представлены на рис. 4.3.
Используя планы, легко найти физические величины скоростей и ускорений, для этого необходимо измерить отрезки в миллиметрах, выражающие скорости и ускорения, и умножить их на соответствующий масштаб.
Абсолютная
скорость точки В:
![]() ,
,
![]() .
.
Относительная
скорость точки В:
![]() ,
.
,
.
Угловая
скорость шатуна 2:
 ,
,
![]() .
.
Тангенциальное ускорения точки В относительно точки А:
![]() ,
,
![]() .
.
Полное
относительное ускорение:
![]() ,
.
,
.
Угловое
ускорение шатуна 2:
 ,
,
![]() .
.