

Удельное скольжение
Удельным
скольжением называется отношение
скорости скольжения профилей в точке
их касания к скорости перемещения точки
касания по профилю. Этот
показатель характеризует износ зубьев
в результате трения скольжения их
боковых (рабочих) поверхностей. Возьмём
точки К1
первого профиля и К2
второго профиля, с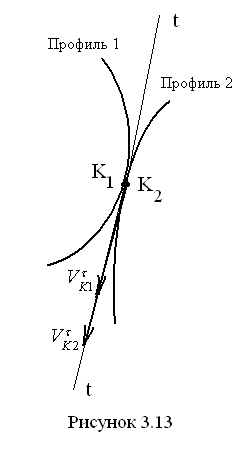 овпадающие
в данный момент друг с другом (рис. 3.13).
В этих точках профили имеют общую
касательную t
– t,
вдоль которой направлены касательные
(тангенциальные) составляющие их
абсолютных скоростей. В общем случае
эти скорости отличаются друг от друга
по величине, могут отличаться и по
направлению, оставаясь на общей
касательной. Разность величин этих
скоростей составляет скорость скольжения
в контакте зубьев.
овпадающие
в данный момент друг с другом (рис. 3.13).
В этих точках профили имеют общую
касательную t
– t,
вдоль которой направлены касательные
(тангенциальные) составляющие их
абсолютных скоростей. В общем случае
эти скорости отличаются друг от друга
по величине, могут отличаться и по
направлению, оставаясь на общей
касательной. Разность величин этих
скоростей составляет скорость скольжения
в контакте зубьев.
Согласно определению, удельное скольжение выразится двумя математическими выражениями, относящимися к разным колёсам:
 и
и
 .
.
Для определения тангенциальных составляющих скоростей обратимся к
рис.
3.14. Соединим точку К1
с центром О1
вращения
колеса 1 радиусом R1,
и точку К2,
совпадающую с точкой К1,
с центром О2
радиусом R2.
Перпендикулярно радиусу R1
в сторону вращения колеса 1 отложим
абсолютную скорость точки К1,
равную
![]() ,
и перпендикулярно радиусу R2
в сторону вращения колеса 2 отложим
абсолютную скорость точки К2,
равную
,
и перпендикулярно радиусу R2
в сторону вращения колеса 2 отложим
абсолютную скорость точки К2,
равную
![]() .
Отметим угол β1
между радиусом R1
и перпендикуляром O1N1
к линии зацепления и β2
между радиусом R2
и перпендикуляром О2N2
также к линии зацепления. Спроецируем
скорости
.
Отметим угол β1
между радиусом R1
и перпендикуляром O1N1
к линии зацепления и β2
между радиусом R2
и перпендикуляром О2N2
также к линии зацепления. Спроецируем
скорости
![]() и
и
![]() на линию зацепления N1N2.
Линия зацепления направлена по нормали
к профилям зубьев, поэтому проекции
скоростей на неё являются нормальными
составляющими, равными друг другу.
Составляющие, направленные перпендикулярно
линии зацепления, действуют по касательной
к профилям и являются тангенциальными
составляющими. Они определяются
следующими цепоч-
на линию зацепления N1N2.
Линия зацепления направлена по нормали
к профилям зубьев, поэтому проекции
скоростей на неё являются нормальными
составляющими, равными друг другу.
Составляющие, направленные перпендикулярно
линии зацепления, действуют по касательной
к профилям и являются тангенциальными
составляющими. Они определяются
следующими цепоч-
ками преобразований
![]()

C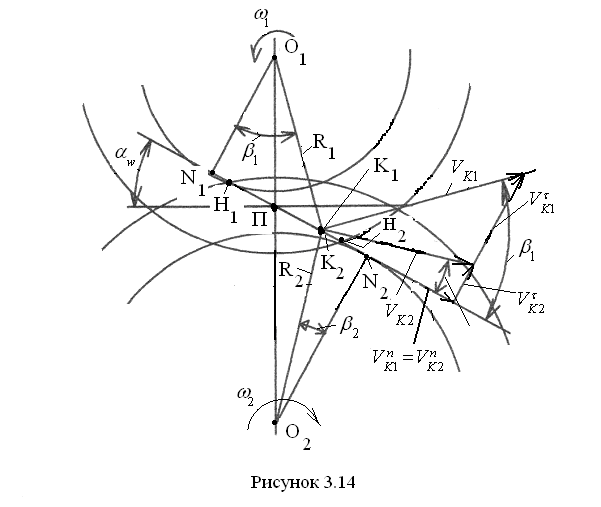 учётом этого ранее записанные выражения
примут следующий вид:
учётом этого ранее записанные выражения
примут следующий вид:
 ,
,
 .
.
В этих выражениях буквой К обозначены совпадающие друг с другом точки К1 и К2. Схематический график удельного скольжения показан на рис. 3.15.
Г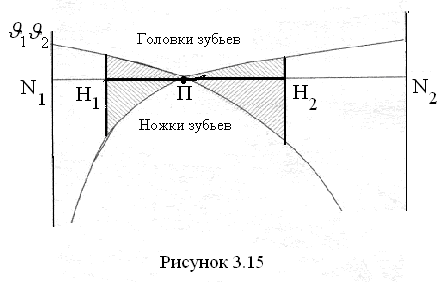 рафик
показывает, что удельное скольжение на
головках зубьев меньше чем на ножках,
следовательно, ножки изнашиваются
интенсивнее, чем головки. Характер
износа таков, что чем дальше от полюса
в радиальном направлении находится
зона профиля, тем больше она изнашивается.
В полюсе зацепления износ от скольжения
равен нулю, так как эта точка является
мгновенным центром поворота одного
колеса относительно другого, и точки
профилей, попадающие в полюс, имеют
радиус относительного вращения вокруг
полюса, равный нулю.
рафик
показывает, что удельное скольжение на
головках зубьев меньше чем на ножках,
следовательно, ножки изнашиваются
интенсивнее, чем головки. Характер
износа таков, что чем дальше от полюса
в радиальном направлении находится
зона профиля, тем больше она изнашивается.
В полюсе зацепления износ от скольжения
равен нулю, так как эта точка является
мгновенным центром поворота одного
колеса относительно другого, и точки
профилей, попадающие в полюс, имеют
радиус относительного вращения вокруг
полюса, равный нулю.
Коэффициент удельного давления
Коэффициентом удельного давления называется отношение модуля зацепления к приведённому радиусу кривизны профилей зубьев в точке их контакта. Этот коэффициент применяется при расчёте зубьев на контактную прочность. Формула Герца для расчёта контактных напряжений в контакте двух цилиндров имеет вид
где
![]() –нормальное
усилие, сжимающее цилиндры,
–нормальное
усилие, сжимающее цилиндры,
![]() –
приведённый модуль упругости,
–
приведённый модуль упругости,
![]() – длина контактной
линии цилиндров,
– длина контактной
линии цилиндров,
![]() –
приведённый радиус кривизны цилиндров.
–
приведённый радиус кривизны цилиндров.
Умножив
числитель и знаменатель формулы на
модуль
![]() ,
не изменим результат, а формула Герца
приобретёт следующий вид
,
не изменим результат, а формула Герца
приобретёт следующий вид
где
 и представляет собой коэффициент
удельного давления.
и представляет собой коэффициент
удельного давления.
П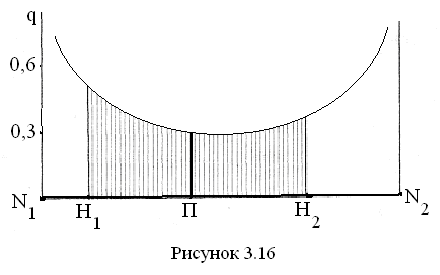 риведённый
радиус кривизны определяется как
величина, обратная приведённой кривизне,
равная сумме кривизн контактирующих
профилей, т. е.
риведённый
радиус кривизны определяется как
величина, обратная приведённой кривизне,
равная сумме кривизн контактирующих
профилей, т. е.
 .
.
На
основании свойств эвольвенты радиусы
кривизны профилей равны:
![]() и
и![]() ,
поэтому окончательно формула получится
в виде
,
поэтому окончательно формула получится
в виде
 .
.
Примерный вид графика коэффициента удельного давления в зависимости от положения точки контакта на линии зацепления показан на рис. 3.16.