

29)Устойчивость динамических систем. Критерий устойчивости по корням характеристического уравнения.
Представление об устойчивости хорошо иллюстрируются на примере шарика, находящегося на различных поверхностях. (рис. 3.2 - 3.5). Положение равновесия (устойчивости) шарика, который совместно с поверхностью представляет собой систему, это такое его состояние, в котором он может находиться без движения бесконечно долго.
Если с помощью какого-либо воздействия вывести шарик из положения равновесия, а затем убрать это воздействие, то он будет находиться в свободном состоянии и совершать свободное движение. Устойчивость рассматриваемого положения равновесия шарика определяется характером этого свободного движения. Если, как показано на рис. 3.2, шарик возвращается в положение равновесия после снятия силы, то положение равновесия называется устойчивым. Соответственно о системе говорят, что она устойчивая.
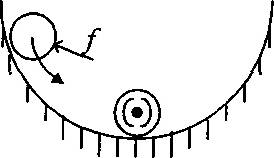 Рис. 3.2
Рис. 3.2
Если шарик после снятия силы, не возвращается к положению равновесия, а остается в новом состоянии, (рис. 3.3), то такое положение называется безразличным, а соответствующая система – консервативной. Она находится на границе устойчивости.
![]() Рис. 3.3
Рис. 3.3
Если шарик удаляется от положения равновесия после прекращения действия отклоняющей силы (рис. 3.4), то положение равновесия и соответствующая система называются неустойчивыми.
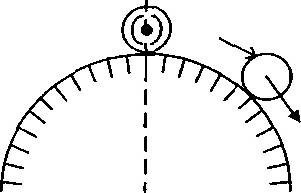 Рис.
3.4
Рис.
3.4
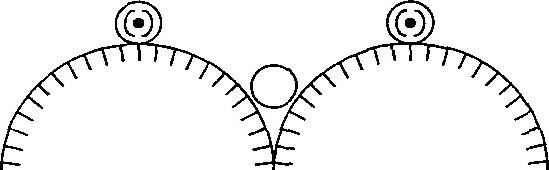
Нелинейные системы могут иметь несколько положений равновесия (рис. 3.5). При этом некоторые из них являются устойчивыми, а некоторые неустойчивыми. Поэтому в нелинейных системах говорят об устойчивости конкретного положения равновесия.
Определим понятие устойчивости движения системы, которая описывается уравнениями состояния:
 (3.6)
(3.6)
Уравнение свободного движения данной системы имеет вид:
 (3.7)
(3.7)
 (3.8)
(3.8)
Положением равновесия этой системы является состояние scв(t)≡0. Свободное движение динамической системы описывается решением системы уравнений (3.7), которое имеет вид
 (3.9) где s0
- вектор
начальных отклонений переменных
состояния.
(3.9) где s0
- вектор
начальных отклонений переменных
состояния.
Динамическая
система, описываемая уравнениями (3.6),
асимптотически устойчива, если при
любых
 выполняются условия
выполняются условия
 (3.10)
(3.10)
 (3.11)
Если (3.10) выполняется, а (3.11) - нет, то
система находится на границе устойчивости.
Такие системы считаются неустойчивыми.
Существуют критерии, по которым можно
определить устойчивость систем без
решения системы уравнений (3.7).
(3.11)
Если (3.10) выполняется, а (3.11) - нет, то
система находится на границе устойчивости.
Такие системы считаются неустойчивыми.
Существуют критерии, по которым можно
определить устойчивость систем без
решения системы уравнений (3.7).
Система (3.6) является асимптотически устойчивой, если вещественные части всех корней ее характеристического полинома (обычно А(р) из (2.17) строго отрицательны (Гурвицевы полиномы).
Обычно применяют критерий устойчивости, по которому для асимптотической устойчивости системы (3.6) необходимо, чтобы все коэффициенты аi характеристического полинома были положительны. Отметим, что это необходимое условие устойчивости.
30)Устойчивость динамических систем. Алгебраические критерии устойчивости.
Данные критерии используются для алгебраической оценки асимптотической устойчивости систем и определения неизвестных параметров системы, при которых она является устойчивой.
Эти критерии также основаны на исследовании характеристического полинома, в качестве которого обычно принимается знаменатель передаточной функции системы в замкнутом состоянии. При этом необходимо, чтобы исследуемая система была полной.
Прежде чем применять алгебраические критерии необходимо проверить выполнение необходимого условия устойчивости. (см.выше)