

6.3. Вычисление координат пунктов съемочных сетей
Перед вычислением координат пунктов съемочных сетей проверяются записи и вычисления в журналах угловых и линейных измерений, а также соответствие выполненных измерений установленным допускам. В измеренную длину линии вводят поправки за компарирование и температуру в том случае, если они в сумме превышают 1:5000 длины измеренной линии.
Угловые невязки ходов съемных сетей не должны превышать величин, определяемых по формулам п. 5.5.2.
6.4. Определение высот пунктов съемочной сети
Высоты пунктов съемочной сети определяются техническим или тригонометрическим нивелированием. Тригонометрическое нивелирование выполняется, как правило, одновременно с проложением теодолитовых ходов.
Допускаемая высотная невязка
тригонометрического нивелирования не
должна превышать 120
![]() ,
мм, где L - длина хода, км. Невязка
ходов технического нивелирования не
должна превышать 50
,
мм, где L - длина хода, км.
,
мм, где L - длина хода, км. Невязка
ходов технического нивелирования не
должна превышать 50
,
мм, где L - длина хода, км.
Вопрос 6
2.1. Условные уравнения
Пусть измерено n величин у1, у2, ..., уn с весами р1, р2, ..., рn.
Обозначим t - число необходимых измерений;
r = n - t (1)
- число избыточных измерений.
Истинные значения измеренных величин Yi связаны между собой уравнениями:
Фj(Y1, Y2, ..., Yn) = 0, (j = 1, 2, ..., r). (2)
Уравнения, выражающие математическую связь между истинными значениями измеренных величин, называются условными уравнениями связи. В систему включают только независимые уравнения в количестве r = n - t, (r < n). Если число уравнений будет больше r, появятся зависимые уравнения и задача уравнивания станет неопределенной. Если число уравнений окажется меньше r, после уравнивания останутся невязки.
Подстановка в уравнения (2) результатов измерений приводит к системе:
Фj(y1, y2, ..., yn) = wj, (j = 1, 2, ..., r), (3)
в которой невязки wj являются истинными ошибками соответствующих функций Фj.
Для устранения невязок отыскивают поправки vi к результатам измерений из решения системы
Фj(y1 + ν1, y2 + ν2, ..., yn + νn) = 0, (j = 1, 2, ..., r) (4)
под условием МНК
[pv²] = min. (5)
Условные уравнения (4) могут иметь нелинейный вид. Способов решения систем нелинейных уравнений произвольного вида не существует. Чтобы решить задачу, функции (4) приводят к линейному виду разложением в ряд Тейлора. Полагая, что νi << yi, рассматривают поправки νi, как приращения аргументов yi. Функции Фj должны быть дифференцируемы.
Фj(y1
+ ν1,
y2
+ ν2,
..., yn
+ νn)
= Фj(y1,
y2,
..., yn)
+

Нелинейными членами разложения (остатком R) пренебрегают.
Обозначают:
Фj(y1, y2, ..., yn) = wj
- невязки - свободные члены условных уравнений поправок;

- коэффициенты условных уравнений поправок - частные производные от функций Фj, вычисляемые по результатам измерений.
 (6)
(6)
- система условных уравнений поправок или в матричном виде:
АrnVn1 + Wr1 = 0. (7)
Здесь
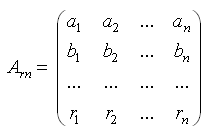 -
матрица коэффициентов;
-
матрица коэффициентов;
 -
вектор поправок к результатам измерений;
-
вектор поправок к результатам измерений;
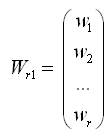 -
вектор невязок.
-
вектор невязок.
Систему (7) условных уравнений поправок решают под условием (5) МНК
![]()
 -
матрица весов результатов измерений.
-
матрица весов результатов измерений.
Используют метод Лагранжа с неопределенными множителями, называемыми в геодезии коррелатами.
![]() -
вектор коррелат.
-
вектор коррелат.
Решение приводит к образованию системы нормальных уравнений коррелат
![]() (10)
(10)
 -
матрица коэффициентов нормальных
уравнений. Коэффициенты, стоящие на
главной диагонали, называются
квадратичными. Они всегда положительны.
Остальные коэффициенты неквадратичные.
-
матрица коэффициентов нормальных
уравнений. Коэффициенты, стоящие на
главной диагонали, называются
квадратичными. Они всегда положительны.
Остальные коэффициенты неквадратичные.
πi = 1/pi - обратный вес результата измерения.
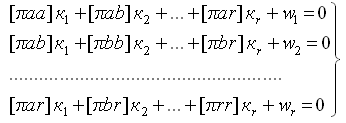 (11)
(11)
- нормальные уравнения коррелат.
Из решения нормальных уравнений находят коррелаты к1, к2, ..., кr, а затем поправки к результатам измерений по формуле:
![]() (12)
(12)
После этого вычисляют уравненные значения результатов измерений
![]() (13)
(13)
и делают контроль уравнивания подстановкой уравненных измерений в условные уравнения связи, невязок не должно быть:
![]() (14)
(14)
Если измерения равноточные, вес измерения равен единице, pi = πi = 1, матрицы весов и обратных весов единичные Pnn = Пnn = E.