

Задание 4 – Построение матрицы функций модальной чувствительности
Выделение доминирующих параметров:
![]() ,
,
![]() .
.
Из уравнения
![]() ,
где
,
где
![]() найдем матрицу
найдем матрицу
![]() вещественного вида:
вещественного вида:
![]() ,
,
![]() .
.
Вычислим функции
модальной чувствительности
![]() (
(![]() )
с помощью соотношений:
)
с помощью соотношений:
![]()
![]() ,
, ![]() ;
;
![]() ,
, ![]() ;
;
![]() ,
, ![]() ;
;
![]() ,
, ![]() .
.
Сконструируем матрицу функций модальной чувствительности в виде функций чувствительности вещественной и мнимой частей:
![]() ,
,
где
![]()
По нормам столбцов выделяем доминирующие параметры:
![]()
Для выделения неблагоприятного сочетания вариаций параметров воспользуемся сингулярным разложением матрицы модальной чувствительности:
![]() .
Используем функцию svd()
пакета Matlab.
.
Используем функцию svd()
пакета Matlab.
![]() ,
,
![]() ,
,
 .
.
Зададимся сферой
![]() с тем, чтобы все вариации параметров
ограничить числом 0,5 – пределы применимости
теории чувствительности. Введем наиболее
неблагоприятное сочетание вариаций
параметров, задаваемое вектором:
с тем, чтобы все вариации параметров
ограничить числом 0,5 – пределы применимости
теории чувствительности. Введем наиболее
неблагоприятное сочетание вариаций
параметров, задаваемое вектором:
![]() ,
,
а также наименее неблагоприятное сочетание вариаций параметров, задаваемое вектором:
![]()
Задание 5 – Построение закона управления для объекта, заданного интервальными элементами
Дано ВМО ВСВ НОУ с интервальными матричными компонентами в форме
![]()
![]()
получаемое с
использованием интервальной арифметики
на основе интервальной реализации
параметров
![]() ,
записываемых в форме
,
записываемых в форме
![]()
при следующих
граничных (угловых) значениях:
![]()
Закон управления
(ЗУ):
![]() должен доставлять системе с интервальными
матричными компонентами
должен доставлять системе с интервальными
матричными компонентами
![]()
![]()
образованной объединением НОУ и ЗУ, с помощью:
- матрицы
![]() прямой связи по входу
прямой связи по входу
![]() равенство входа
и выхода
равенство входа
и выхода
![]() в неподвижном состоянии при медианных
значениях параметров;
в неподвижном состоянии при медианных
значениях параметров;
- матрицы
обратной связи по состоянию
![]() при медианных значениях параметров
распределение мод Баттерворта с
характеристической частотой
при медианных значениях параметров
распределение мод Баттерворта с
характеристической частотой
![]() ,
которая гарантирует достижение оценки
относительной интервальности матрицы
состояния системы
,
которая гарантирует достижение оценки
относительной интервальности матрицы
состояния системы
![]()
не больше заданной
![]() .
.
Методом модального
управления, базовый алгоритм которого,
опирающийся на решение матричного
уравнения Сильвестра и примененный к
медианным составляющим интервальных
матричных компонентов ВМО ВСВ НОУ,
дополняется контролем нормы
![]() медианной составляющей интервальной
матрицы
медианной составляющей интервальной
матрицы
![]() спроектированной системы с последующим
вычислением оценки
спроектированной системы с последующим
вычислением оценки
![]() ,
вычислить матрицы
и
.
,
вычислить матрицы
и
.
Формирование ВМО ВСВ интервального ОУ:
 ,
,
 ,
,
![]() .
.
Для упрощения
задачи, добьемся того, чтобы интервальной
была бы только матрица состояния. Сделаем
сигнал управления третьей переменной
состояния
![]() и введем новое входное воздействие
и введем новое входное воздействие
![]() .
.
 `
`
Пусть управление имеет вид:
![]() .
.
Новая модель ВСВ примет вид:
Итак, имеем новые матрицы описания объекта
Далее определим
угловые значения матрицы
![]()
Легко видеть, что
элементы матрицы
![]() примут максимальные значения при
примут максимальные значения при
![]() ,
,
![]() ,
а минимальные, наоборот, при
,
а минимальные, наоборот, при
![]() ,
,
![]() .
Остается лишь сравнить значения матрицы
при
.
Остается лишь сравнить значения матрицы
при
![]() ,
,
![]() и
и
![]() ,
,
![]() .
.
Итак,
при , .
при , .
Интервальные матрицы вычисляем по правилам интервальной арифметики:
Граничные значения
матрицы
![]() получим, скомпоновав экстремальные
значения каждой составляющей матрицы
.
получим, скомпоновав экстремальные
значения каждой составляющей матрицы
.
 ,
, .
.
Необходимо отметить,
что полученные граничные значения
интервальной матрицы
![]() физически не реализуемы, то есть элементы
матрицы не могут принять одновременно
указанные экстремальные значения.
Другими словами, здесь неизбежно
закладывается избыточность в задании
матрицы. Это сделано формально с тем,
чтобы все реализации матрицы ограничивались
указанными значениями.
физически не реализуемы, то есть элементы
матрицы не могут принять одновременно
указанные экстремальные значения.
Другими словами, здесь неизбежно
закладывается избыточность в задании
матрицы. Это сделано формально с тем,
чтобы все реализации матрицы ограничивались
указанными значениями.
Медианное значение интервальной матрицы найдем как половину суммы угловых значений.
 .
.
![]() .
.
 ,
,
 .
.

Формирование ММ:
![]()
Матрица
![]() составляется, исходя из требуемого
распределения мод
составляется, исходя из требуемого
распределения мод
![]() ,
, ![]() ;
;
![]() ,
,
![]() .
.
 .
.
Матрица
![]() выбирается из условия полной наблюдаемости
пары
и
:
выбирается из условия полной наблюдаемости
пары
и
:
![]() .
.
Решим задачу медианного МУ с помощью уравнения Сильвестра:
![]() ,
,
 .
.
Формирование
медианной составляющей
![]() интервальной матрицы
интервальной матрицы
![]() :
:
![]() ,
,
 ,
,
Проверка выполнения
условия
![]() :
:
![]() .
.
Таким образом, на
частоте среза
![]() достигается требуемая относительная
интервальность матрицы состояния
системы.
достигается требуемая относительная
интервальность матрицы состояния
системы.
Формирование закона управления:
![]() ,
, ![]() .
.
![]() ,
, ![]() .
.
Закон управления имеет вид:
![]() .
.
Переходя от
виртуального управления
к реальному
![]() ,
получим следующий математическую версию
закона управления:
,
получим следующий математическую версию
закона управления:
![]() .
.
![]()
Реализационная версия этого закона имеет вид:
![]() .
.
Замечание 4.
Последняя версия будет реализуемой только в случае доступности измерению всех переменных состояния. В противном случае необходимо выстраивать наблюдатель, с целью получения оценок переменных состояния. В этом случае закон управления примет вид:
![]() ,
,
где и - оценки переменных состояния и соответственно.
Замечание 5.
Схема моделирования полученной интервальной системы представлена на рисунке 5.1:
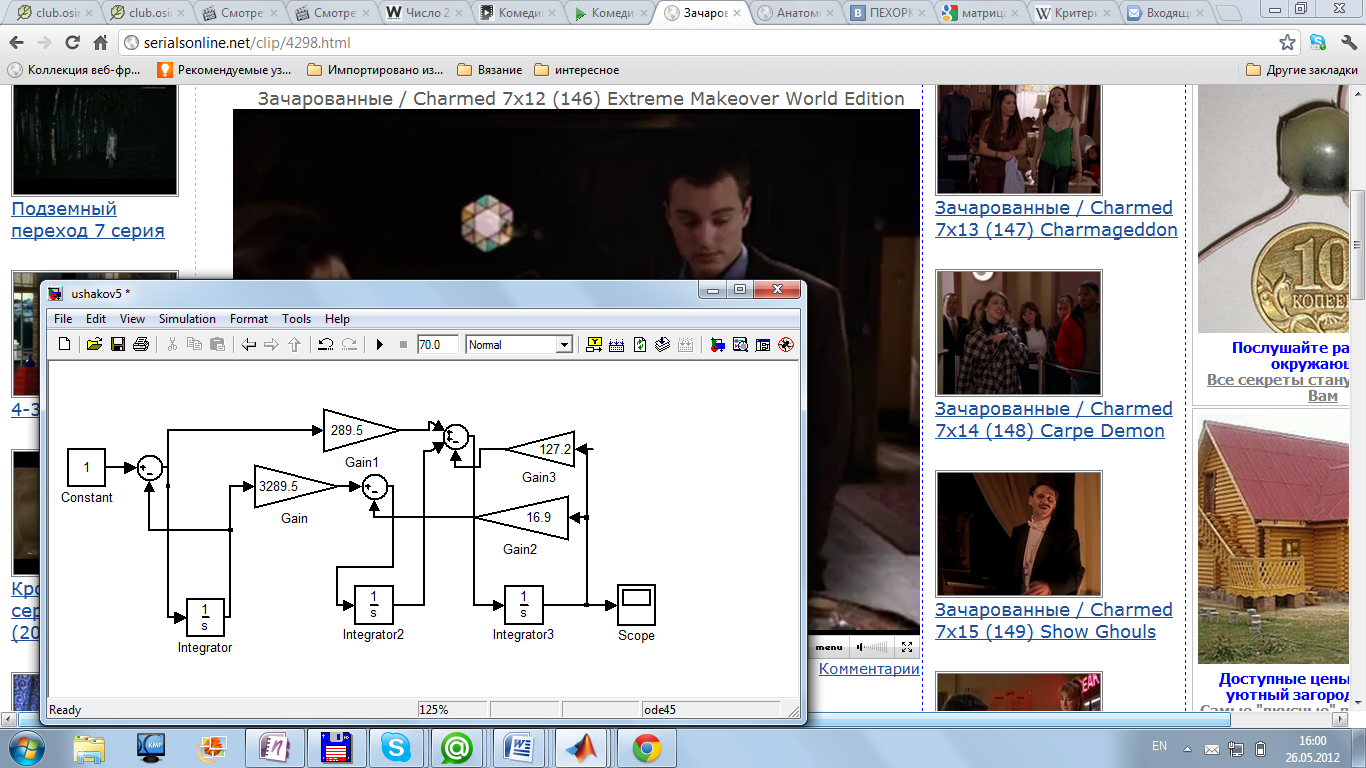
Рисунок 5.1 – Схема моделирования интервальной системы
Переходная функция интервальной системы представлена на рисунке 5.2
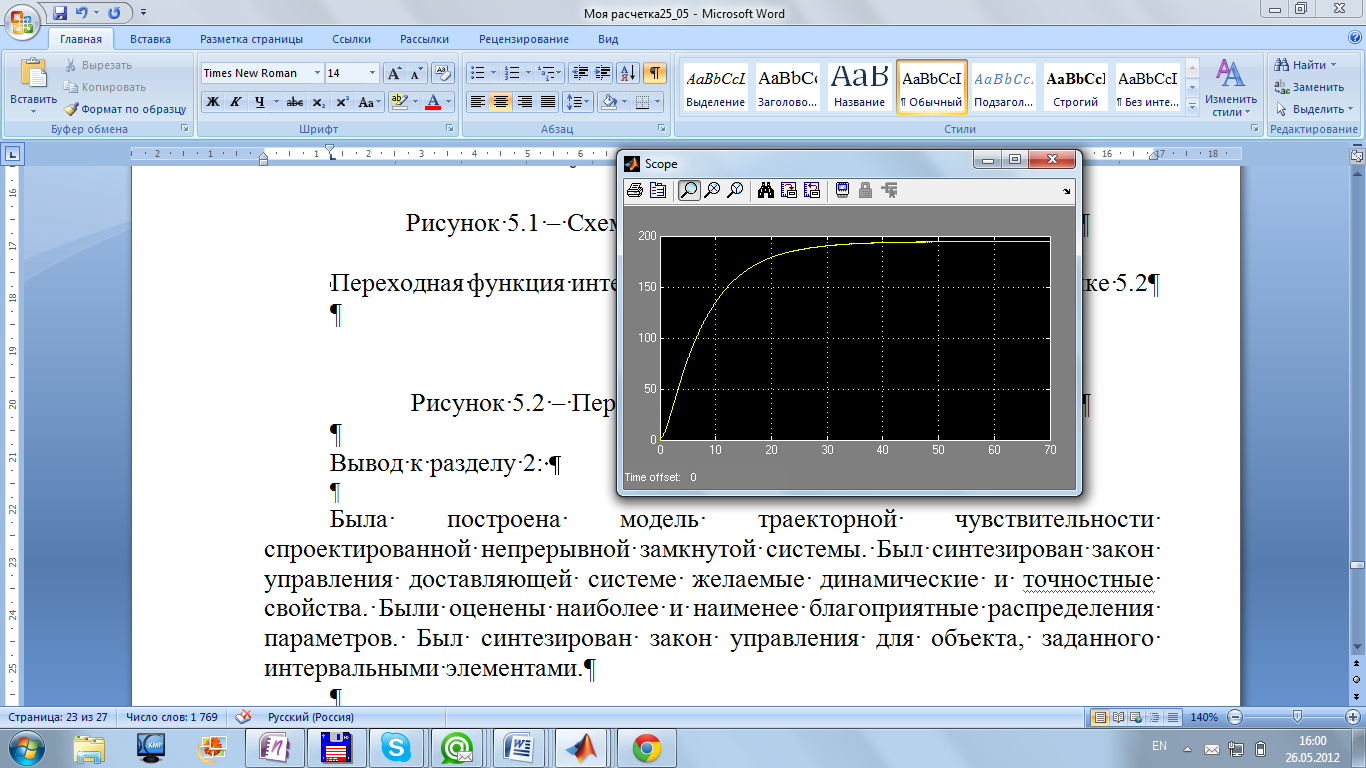
Рисунок 5.2 – Переходная функция интервальной системы
Вывод к разделу 2:
Была построена модель траекторной чувствительности спроектированной непрерывной замкнутой системы. Был синтезирован закон управления доставляющей системе желаемые динамические и точностные свойства. Были оценены наиболее и наименее благоприятные распределения параметров. Был синтезирован закон управления для объекта, заданного интервальными элементами.