

5.6. Привод газовый пг
Газовый привод ПГ - исполнительный орган системы управления ракеты, предназначен для отклонения рулей.
ПГ представляет собой систему взаимосвязанных устройств, предназначенных для приведения в движение рулей (рис.20).
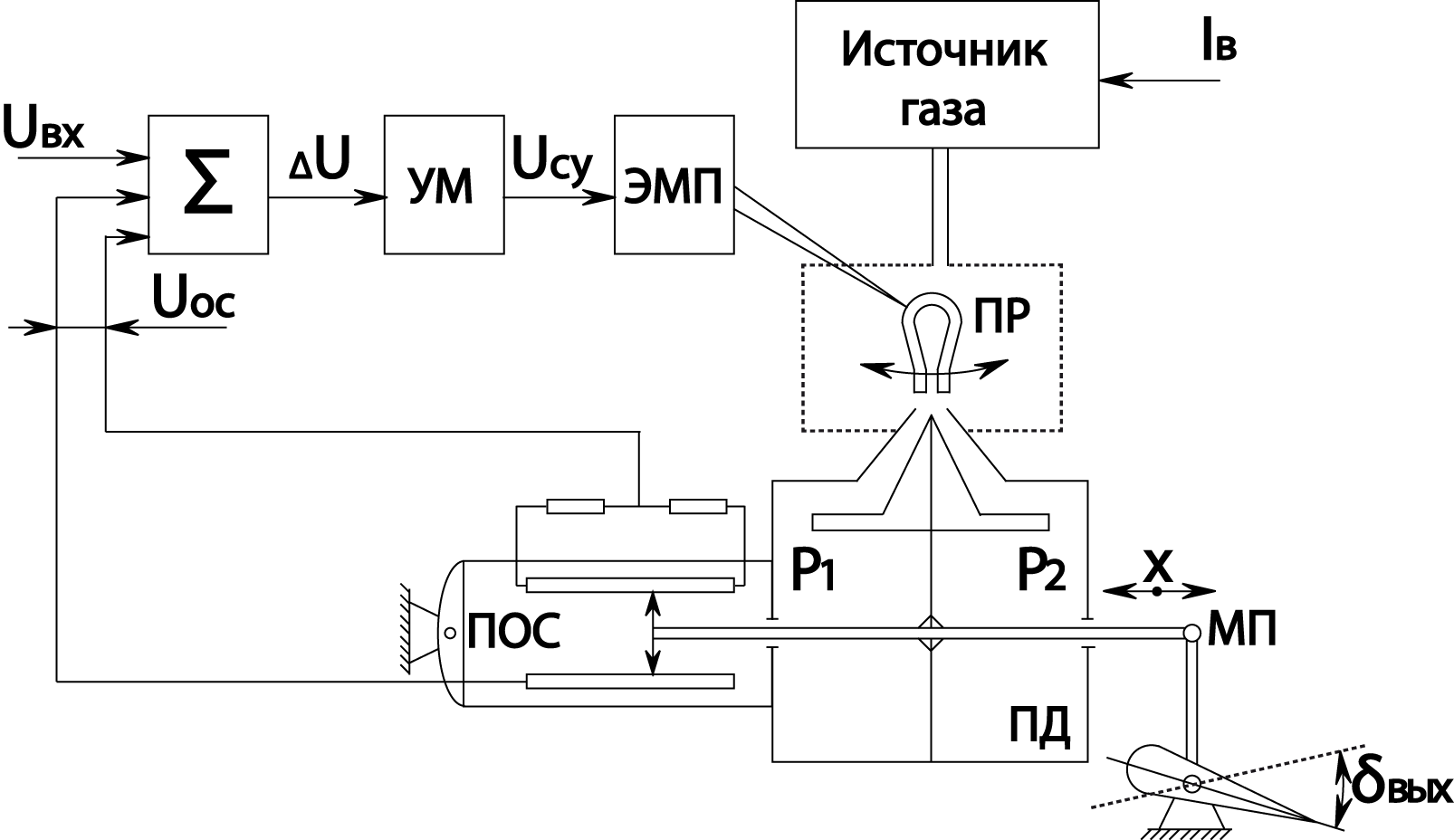
Рис.20. Газовый привод (структурная схема).
Σ - сумматор сигналов
УМ - усилитель мощности
ЭМП - электромеханический преобразователь
ПР - пневматический распределитель
ПД - пневматический двигатель
ПОС - потенциометр обратной связи
МП - механическая передача
Пневмоустройства привода по функциональному назначению подразделяются на исполнительные, распределительные и управляющие.
При подаче импульса включения Iв сжатый газ поступает на вход пневматического распределителя (ПР), входящего в контур следящего привода. Задача ПР - перемещение выходного штока ( δвых) пропорционально входному сигналу Uвх.
Если Uвх равен сигналу обратной связи Uос, то с сумматора ( ∑ ) сигнала нет и якорь электромеханического преобразователя (ЭМП) и связанная с ним трубка ПР находятся в среднем положении.
При этом газ поступает в обе полости пневматического двигателя (ПД) в одинаковых количествах и последний неподвижен. Если равнове¬сие сигналов нарушается (Uвх-Uос ≠0), якорь ЭМП и струйная трубка отклоняются. При этом в одну из полостей ПД поступает, большее количество газа, в другую - меньшее, т.е. в полостях создается разность давлений (P1 – P2≠ 0), и поршень через механическую передачу (МП) передвигает руль на угол δвых. Перемещение закончится, когда новая величина Uос, подаваемого с потенциометра обратной связи (ПОС), уравновесит значение входного сигнала:
Uвх-Uос = 0.
Мощность управляющего воздействия ПР мала, а мощность выходных газовых потоков достаточно велика, следовательно, ПР имеет большой коэффициент усиления по мощности, равный ~(103 – 104). Из-за малой массы подвижных элементов достигается достаточно большое быстродействие. Конструктивно ПГ выполнен в виде единого рулевого агрегата.
5.7. Радиовысотомер
Радиовысотомер предназначен для измерения высоты полета над любой подстилающей поверхностью независимо от погодных условий и выдачи в ИСУ этих данных,
РВ с непрерывным излучением частотно-модулированного СВЧ сигнала. Тип модуляции - несимметричная нарастающая функция с коротким обратным ходом (Тох) и паузой (Тп) (рис.21). Измеряемая высота кодируется в длительности рабочего хода Тм модулирующей функции, которая измеряется цифровым периодомером. Через конечное устройство информация о высоте передается в ИСУ ракеты.
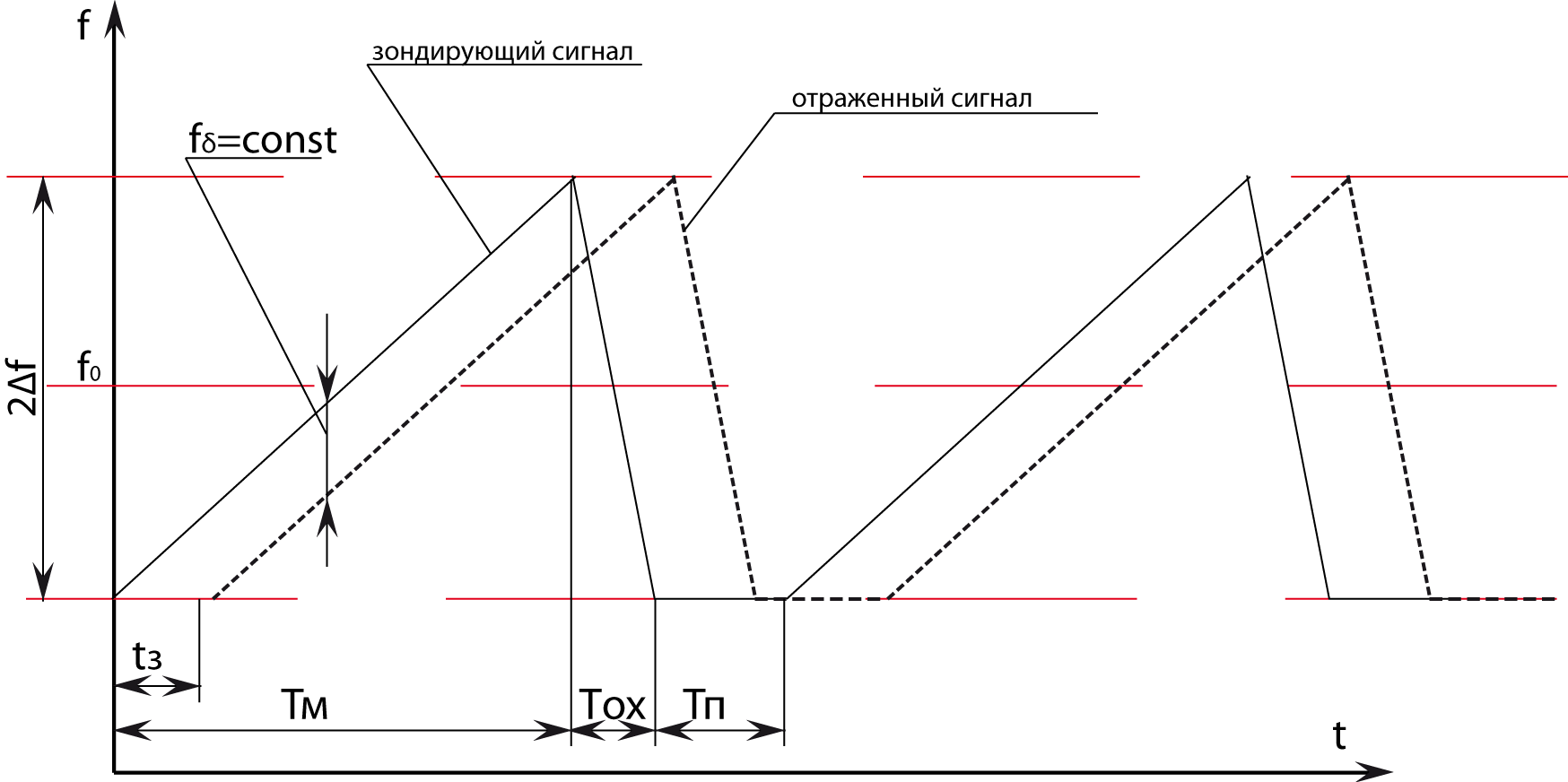
Рис. 16. Закон модуляции.
Принцип действия РВ основан на поддерживании следящей системой частоты биений fδ на уровне опорной f0 при различных высотах полета за счет изменения крутизны рабочего хода модулирующей функции при ее неизменной амплитуде. Пауза в модуляции делается для успокоения "звона" в приемнике, возникающего в моменты резкого излома модулирующей функции вследствие ударного возбуждения. Длительность Тм является линейной функцией измеряемой высоты:
Тм = 4 · ∆ f · H / (C · fδ) (5.4.)
где ∆ f - девиация частоты зондирующего сигнала;
fδ - частота биений;
H - измеряемая высота;
С - скорость распространения радиоволн.
РВ выдает информацию в виде чередующихся слов последовательного 32-разрядного двоичного кода.
Конструктивно РВ выполнен в виде моноблока с двумя рупорными антеннами, которые соединены с моноблоком ВЧ кабелями.