

Снятие и исследование электромеханических характеристик электропривода с асинхронным двигателем
Цель работы.
Ознакомиться с устройством асинхронного двигателя с к.з. ротором.
Снять и построить рабочие и механическую характеристики двигателя.
Основные теоретические положения.
Трехфазный асинхронный двигатель состоит из двух основных частей: статора и ротора. Статор - неподвижная часть двигателя, служит для создания вращающегося магнитного поля. Схема соединения трехфазной статор- ной обмотки - звезда или треугольник. Магнитное поле статора пересекает ^ооводники обмотки ротора и наводит в них переменную э.д.с. Поскольку
смотка ротора замкнута, эта э.д.с. вызывает в ней ток того же направления, что и э.д.с. В результате взаимодействия тока ротора с вращающимся магнитным полем возникает электромагнитная сила, действующая на проводники ротора. Сила создает вращающий момент, действующий в ту же сторону, что и сила.
Под действием момента вращения ротор приходит в движение и после разбега вращается в том же направлении, что и магнитное поле с несколько меньшей частотой вращения, чем поле:
л2 = (0,92. . . О, 98) гц,
где nl - частота вращения магнитного поля статора, или синхронная частота вращения;
п2 - частота вращения ротора.
Синхронная частота вращения определяется частотой тока (fl) источника питания двигателя и числом пар полюсов статора (Р):
60f!
пг = .
р
Частота вращения ротора определяется скольжением:
п2 « гц (1 - S) ,
где S - скольжение:
пг - п2
S = ;
ni
Величина э.д.с. в обмотке статора и ротора равна:
Ех = 4,44Ko6i f1W10m, Е2 = 4, 44Коб2 f2W2<Pm.
Величина э.д.с. в обмотке неподвижного ротора равна:
Е2к = 4,44Коб2 fiW2<Pm,
где Кобг и Коб2 - обмоточные коэффициенты статора и ротора:
Коб = (0г 92. . . 0,96) ;
Где f2 - частота тока ротора;
fx - частота тока статора;
Фт - магнитный поток статора;
WlrW2 - число витков обмотки статора и ротора.
Величина скольжения определяет величину э.д.с. ротора и частоту тока ротора:
f2 = fi S, Е2 = Е2к S
при подвижном роторе.
Ток фазы обмотки ротора определяется по закону Ома:
Е2 Е2к S
12 = ,
R2 +(X2*S) (R2/S) + x2
где - E2k, X2 - э.д.с. и индуктивное сопротивление обмотки неподвижного ротора, т.е., когда f2 = fx-
Из данного выражения следует, что в момент пуска, когда 5=1, ток в обмотке ротора и статора (пусковой) наибольший. Большой пусковой ток, вызывая падение напряжения U = In*Z, приводит к снижению напряжения питания двигателя и к уменьшению вращающего момента, а также к дополнительному нагреву машины.
Вращающий момент асинхронного двигателя может быть выражен в виде:
4,44m*fx*W2*Om*Ko62*l2*cosf2 М = = С*Фт*12*соз£2,
(о
где С - конструктивный коэффициент двигателя; т - число фаз.
Для получения уравнения механической характеристики необходимо воспользоваться схемой замещения асинхронного двигателя .
Подставив значение приведенного тока из схемы (Рис. 6.1.а) в уравнение электромагнитного момента:
получим:
p*m* (Ul$)2*R/2 м ,
27t*f2*S[(Ri + R^/S)2 + (Xi + X72)]
где R/2 и X/2 - приведенные к обмотке статора активное и реактивное сопротивления фазы обмотки ротора.
Данное уравнение представляет собой уравнение механической характеристики М - f(S) .
Упрощенное выражение механической характеристики имеет вид:
2Мк
М - ,
S/Sk + SK/S
где Sk - критическое скольжение; Мк - критический момент.
Rf 2 т*Р*и21*ф Sk = /
Рабочие характеристики двигателя имеют вид (Рис. 6.2.) и снимаются при неизменном напряжении питания и частоте питающей сети.
Рассмотрим эти характеристики:
зависимость S = f(Р2) . Увеличение мощности на валу двигателя Р2 •оответствует изменению тормозного момента, а следовательно увеличению
Скольжения;
зависимость л = f(Рг) - внешняя характеристика. Из определения скольжения следует, что л = л (1 - S), а так как с увеличением мощности Р2 скольжение растет, следовательно, частота вращения л с увеличением мощности Р2 падает незначительно;
зависимость М - f(Рг) . С увеличением мощности Р2 до Рн вращающий момент также растет, т.к. частота вращения при этом изменяется незначительно .
зависимость cosfl = f(P2). Поскольку главный магнитный поток и реактивная мощность, потребляемая из сети, мало зависят от нагрузки, следовательно, cosfi существенно изменяется:
Pi
cosfx =
Pi + Qi
при изменении нагрузки, т.к. изменяется при этом активная мощность. Из рис. 6.2. видно, что при малых нагрузках, cosfl является довольно низким, поэтому асинхронные двигатели должны работать при номинальной нагрузке .
5) зависимость г/ = f (Р2) :
Р2 Р2 л = = .
Рх Р2 + ЛР
С увеличением мощности Р2 к.п.д. будет возрастать до номинального значения, а далее за счет увеличения переменных потерь (Рмх, Рм2) уменьшаться.
Это объясняется следующим. Потребляемая активная мощность двигателя равна:
Рх = Р2 + Рмх + Рст + Рмех + Рдоп + Рм2
Где: Рмх, Рм2 - потери в меди обмотки статора и ротора;
Рст. - потери в стали статора и ротора;
Рмех. - потери механические;
Рдоп.- потери дополнительные.
С увеличением нагрузки сумма потерь Рст. + Рмех. + Рдоп. практически остается постоянной. К.п.д. двигателя при этом растет (при нагрузке от 0 до Рном.), затем к.п.д. падает, т.к. потери в меди возрастают пропорционально квадрату тока:
Рмх + Рм2 « (II)2 R1 + (12)2 R2.
6.3. План работы.
Собрать схему согласно рис. 6.1.
Опыт холостого хода.
Включите стенд тумблером "Сеть", схему лабораторной установки тумблером S2, асинхронный двигатель кнопкой S4.
Генератор постоянного тока Ml не включать (перемычки П1 и П2 отсутствуют, регулятор ЛATPa Т1.1 в положение "О" тумблер S6 отключен).
В этом режиме измеряются следующие параметры двигателя:
о мощность холостого хода; о ток холостого хода, о напряжение статора.
По измеренным величинам рассчитываются параметры схемы замещения двигателя в режиме холостого хода.
Рис.
6.1.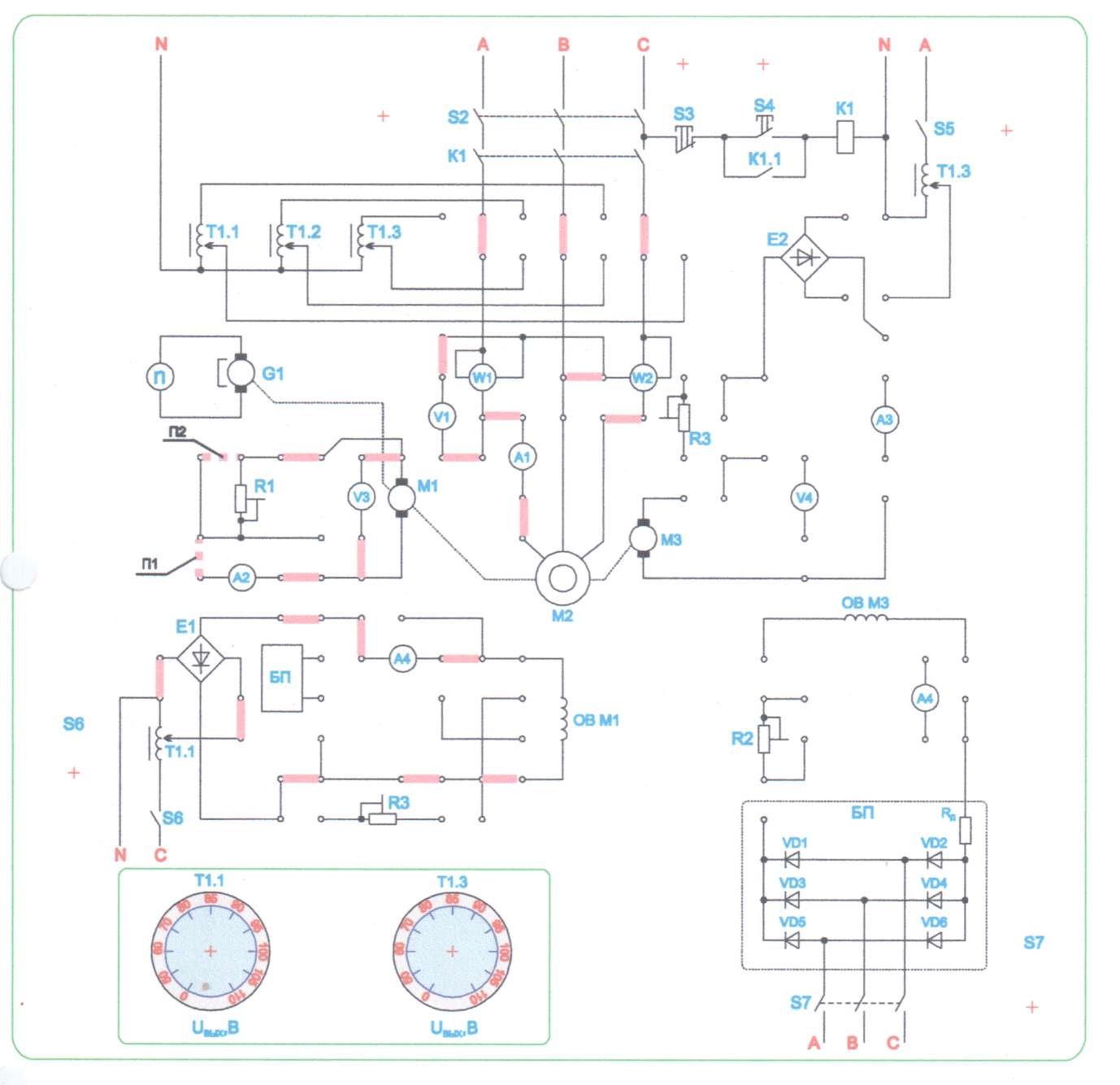
б.3.3. Рабочие характеристики двигателя и опыт короткого замыкания.
Измерьте параметры асинхронного двигателя: о фазный ток статора; о мощность, потребляемую из сети.
ВНИМАНИЕ! Перед проведением работы убедитесь что все галетные переключатели JIATP ов (Tl, Tl.l, Т1.3) установлены в поз. "О". При работе с однофазными JIATPами Т1.1 и Т1.3 не допускается одновременное использование трехфазного JIATP а Т1.
Для снятия рабочих характеристик установите перемычку П1. Включите стенд тумблером "Сеть", схему лабораторной установки тумблером S2, асинхронный двигатель кнопкой S4. Тумблером S6 включите JIATP Tl.l и установите его регулятор в положение "50" и изменяйте нагрузку генератора резистором R1 (положения 1-6) и при необходимости получить R1 = О установить перемычку П2. Изменяя положение регулятора JIATPa Tl.l можно увеличивать нагрузку на асинхронный двигатель, при проскальзывании пас- сика по шкивам - уменьшить напряжение JIATPa. Данные измерений занести в табл. 6.1.
Опыт короткого замыкания.
Зафиксируйте рукой шкив асинхронного двигателя. (При необходимости установить какой из двигателей является искомым, снимите пассик со шкивов и запустите двигатель кнопкой). Включите стенд тумблером "Сеть", схему лабораторной установки тумблером S2, осуществите кратковременный запуск асинхронного двигателя кнопкой S4. Запомните поочередно показания приборов и отключите двигатель кнопкой S3.
ВНИМАНИЕ! Проведение опыта требует осторожности! Шкив двигателя при поданном на него напряжении не отпускать! Время включения двигателя не должно превышать 10 сек. Паузы между зкспериментами не менее 1 мин.
Таблица 6.1.
Опытные данные |
Результаты вычисления |
||||||||||||
Двигатель |
Генератор |
||||||||||||
идв. |
1дв. |
|
П 2 |
Ur |
1г |
Р2 |
М |
S |
Г|ДВ. |
Г)Г. |
COS(pi |
||
В |
А |
Вт |
об/м |
В |
А |
Вт |
Нм |
- |
- |
|
- |
||
По результатам измерений рассчитываются и строятся рабочие характеристики и характеристика короткого замыкания асинхронного двигателя.
6.3.4. Указания по определению расчетных величин.
Подводимая мощность к двигателю:
Pi = Pwi + Pw2,
где Pw2 и Pw2 - показания ваттметров.
Мощность на валу двигателя:
Скольжение двигателя:
Цдв. 1дв.
ie идв - линейное напряжение, 1дв - линейный ток статора.
Обработка результатов лабораторной работы.
Построить рабочие характеристики двигателя.
Построить механическую характеристику двигателя:
Л2 = f(M) , либо S = f(M).
Контрольные вопросы.
Устройство асинхронного двигателя и принцип его действия.
От чего зависит скорость вращения магнитного поля статора?
Объясните, почему ротор асинхронного двигателя не может вращаться синхронно с магнитным полем статора?
Что называется скольжением?
Почему в момент пуска ток статора наибольший?
Каковы способы снижения пускового тока?
От каких параметров зависит момент вращения двигателя?
Как изменится вращающий момент двигателя, если напряжение в сети снизится на 10%?
Что такое критическое скольжение?
Объяснить механическую характеристику двигателя.
Каковы способы регулирования частоты вращения двигателя?
Объяснить рабочие характеристики двигателя.