

Пример расчета
Даны технические данные трехфазных асинхронных двигателей с фазным ротором серии АК2: Рном = 30 кВт, nном =720 об/мин, ηном = 87,5%, cos φном = 0,79, Мmax / Мном = 1,7, R1.20 = 0,0935. Требуется определить номинальное Мном и максимальное Мmax значения моментов, номинальное sH0M и критическое sКР скольжения, а также сопротивление резистора, который следует включить в цепь фазной обмотки ротора, чтобы начальный пусковой момент двигателя был равен максимальному; построить механическую характеристику для этого режима и по ней определить скольжение, соответствующее номинальному моменту Мном. Напряжение сети 380 В, частота 50 Гц; обмотка статора соединена «звездой». Кратность пускового тока при прямом (безреостатном) включении двигателя в сеть λном = 7; коэффициент мощности в режиме короткого замыкания принять равным
cos φK = 0,5 cos φном.
Решение
Потребляемая двигателем мощность в номинальном режиме
Р1ном = Рном / ηном = 30 / 0,875 = 34,3 кВт.
Ток, потребляемый двигателем в номинальном режиме,

Скольжение в номинальном режиме
sHOM = (750 - 720)/750 = 0,04.
Активное сопротивление фазы статора при рабочей температуре 75 °С

Пусковой ток при прямом (безреостатном) включении
Сопротивление короткого замыкания
ZK = U1 / Iп = 220 / 462 = 0,48 Ом.
Коэффициент мощности короткого замыкания
соs φK = 0,5 соs φ1ном = 0,5 * 0,79 = 0,395; sin φK = 0,918.
Индуктивная составляющая сопротивления короткого замыкания
хк = ZK sin φK = 0,48 • 0,918 = 0,44 Ом.
Активная составляющая сопротивления короткого замыкания
rK = ZK соs φK = 0,48 • 0,395 = 0,19 Ом.
Активное сопротивление фазы ротора, приведенное к фазе статора,
r'2 = rк – r1 = 0,19 - 0,114 = 0,076 Ом.
Активное сопротивление фазы ротора при скольжении sном = 0,04
r'2 / sном = 0,076/0,04 = 1,9 Ом.
Номинальное значение электромагнитного момента
Максимальное значение момента
Критическое скольжение
sкр = ± r'2 / хк = 0,076 / 0,44 = 0,17.
Сопротивление резистора гдо6, при включении которого в цепь ротора пусковой момент становится максимальным, должно быть таким, чтобы общее активное сопротивление фазы ротора было равно сопротивлению Хц. Следовательно,

Для построения искусственной механической характеристики М = f(s), соответствующей приведенному значению сопротивления цепи ротора rдо6 + r'2 =
= 0,44 Ом, рассчитаем значения моментов при скольжениях s = 0,5 и s = 0,75.
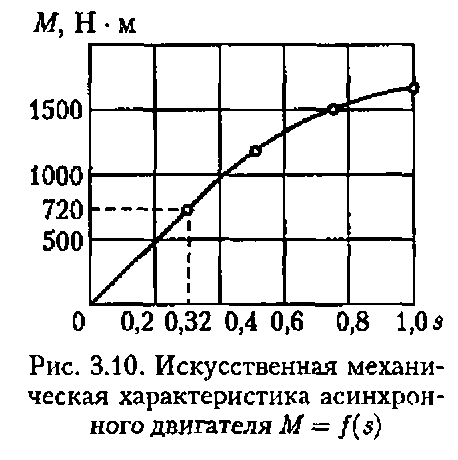
Результаты расчета электромагнитного момента для ряда значений скольжения представлены ниже:
s 0 0,5 0,75 1,0
М, Н • м 0 1381 1500 1640
Из построений на рис. 3.10 следует, что при номинальном моменте Мном = 720 Н*м скольжение составляет s = 0,32, что соответствует частоте вращения nном = 750 (1 - 0,32) = 510 об/мин.
Практическая работа №4
Расчет параметров ад
Для асинхронного двигателя с фазным ротором, данные которого приведены в таблице, номинальная мощность Рном, номинальное скольжение sном, перегрузочная способность λм число полюсов 2р. Требуется рассчитать сопротивления резисторов трехступенчатого пускового реостата ПР.
Параметр |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Рном, кВт |
15 |
75 |
22 |
5,5 |
14 |
7,5 |
22 |
5,5 |
14 |
7,5 |
2р |
8 |
4 |
8 |
8 |
4 |
6 |
8 |
8 |
4 |
6 |
sном % |
5 |
3,3 |
4 |
5,3 |
5 |
5 |
4 |
5,3 |
5 |
5 |
r2, Ом |
0,37 |
0,014 |
0,053 |
0,150 |
0,095 |
0,130 |
0,053 |
0,150 |
0,095 |
0,130 |
λм |
3,0 |
2,0 |
2,0 |
1,7 |
1,7 |
1,7 |
2,0 |
1,7 |
1,7 |
1,7 |
Пример расчета
Для асинхронного двигателя с фазным ротором, данные которого приведены в таблице, номинальная мощность Рном= 15 кВт, номинальное скольжение sном = 5%, перегрузочная способность λм= 3,0, число полюсов 2р = 8. Требуется рассчитать сопротивления резисторов трехступенчатого пускового реостата ПР.
Решение
Номинальная частота вращения

Номинальный момент двигателя

Принимаем значение момента переключений, равным номинальному

Отношение начального пускового момента к моменту переключений принимаем

Начальный пусковой момент
 ,
,
т. е.
 ;
;
это позволяет применить аналитический метод расчета сопротивлений пускового реостата.
Сопротивление резистора третьей ступени ПР

Сопротивление резистора второй ступени ПР

Сопротивление резистора первой ступени

Сопротивление ПР на первой ступени

Сопротивление ПР на второй ступени

Сопротивление ПР на третьей ступени

Практическая работа №5
Расчет мощности электродвигателя при различных режимах работы
В трехфазную сеть напряжением Uc включен потребитель Z мощностью sпотр при коэффициенте мощности соs φ. Определить мощность QCK синхронного компенсатора СК, который следует подключить параллельно потребителю, чтобы коэффициент мощности в сети повысился до значения соs φ’1 = 0,95. На сколько при этом уменьшатся потери энергии в сети, если величина этих потерь пропорциональна квадрату тока в этой сети. Определить также, насколько придется увеличить мощность синхронного компенсатора, чтобы повысить коэффициент мощности сети до соs φ’1 = 1. Значения заданных параметров приведены в таблице.
Параметр |
Варианты |
|||||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
Uc, кВ |
6,0 |
10,0 |
20,0 |
35,0 |
6,0 |
10,0 |
20,0 |
35,0 |
6,0 |
10,0 |
S, кB*A |
1,6 |
4,5 |
1,8 |
2,4 |
0,8 |
1,7 |
1,5 |
3,5 |
2,0 |
3,5 |
соs φ |
0,70 |
0,72 |
0,70 |
0,75 |
0,70 |
0,72 |
0,75 |
0,74 |
0,78 |
0,72 |
Пример расчета
В трехфазную сеть напряжением Uc= 6,0 кВ включен потребитель Z мощностью S = 1.6 кВ*А при коэффициенте мощности соs φ = 0,70. Определить мощность QCK синхронного компенсатора СК, который следует подключить параллельно потребителю, чтобы коэффициент мощности в сети повысился до значения соs φ’1 = 0,95. На сколько при этом уменьшатся потери энергии в сети, если величина этих потерь пропорциональна квадрату тока в этой сети. Определить также, насколько придется увеличить мощность синхронного компенсатора, чтобы повысить коэффициент мощности сети до соs φ’1 = 1. Значения заданных параметров приведены в таблице.
Решение
1. Ток нагрузки в сети

Активная составляющая этого тока

Реактивная мощность сети до подключения синхронного компенсатора

Реактивная мощность сети после подключения синхронного компенсатора

Для повышения коэффициента мощности до соs φ’1 = 0,95 требуется включение параллельно нагрузке Z синхронного компенсатора реактивной мощностью

При включении синхронного компенсатора активная составляющая тока в сети не изменится (Iса = 108 А), а реактивная составляющая тока в сети станет равной

Ток в сети после подключения синхронного компенсатора

Потери в сети после подключения синхронного компенсатора составят

от их значения до подключения синхронного компенсатора ΔР, т.е. потери в сети уменьшатся на 41 %.
При увеличении коэффициента мощности сети до соs φ’1 = 1 требуемая для этого реактивная мощность синхронного компенсатора была бы равна всей реактивной мощности сети до подключения синхронного компенсатора, т.е. QCK = Q = 1120 квар. Следовательно, потребовался бы синхронный компенсатор мощностью в (1120 / 621) = 1,8 раза больше мощности СК, примененного в схеме повышения коэффициента мощности до соs φ’1 = 0,95. Это привело бы к росту капитальных затрат на создание рассматриваемой электрической установки и сделало бы нерентабельным применение синхронного компенсатора для повышения коэффициента мощности сети до единицы.
Лабораторная работа №1
Определение момента инерции и махового момента электропривода по методу свободного выбега.
1.1. Цель работы.
1.1.1. Определить маховый момент и момент инерции электропривода.
1.1.2. Изучить схему пуска ДПТ в функции времени.
1.2. Основные теоретические сведения.
К пуску двигателя предъявляются два основных требования:
обеспечить необходимый для трогания с места и разгона якоря вращающий момент и не допустить при пуске протекания через якорь большого тока, опасного для двигателя. Практически возможны три способа пуска: прямой пуск, пуск при включении реостата в цепь якоря и пуск при пониженном напряжении в цепи якоря.
При прямом пуске цепь якоря включается сразу на полное напряжение. Так как в первый момент пуска якорь неподвижен (n = 0), то
противо-ЭДС отсутствует (Епр. = Се* n*Ф). Тогда следует, что пусковой ток якоря
Iяп = Uя/Rя.
Так как для двигателей большой мощности Rя = О,02... 1,1Ом, то Iяп = (50...100)Iн, что недопустимо. Поэтому прямой пуск возможен только у двигателей малой мощности, у которых Iяп (4...6)Iн и разгон двигателя длится менее 1с.
Пуск при включении пускового реостата Rп последовательно с
якорем обеспечивает пусковой ток, равный:
Uя
I`яп = ---------.
Rя + Rп
Сопротивление Rп = U/Iяп - Rя выбирают таким, чтобы в начальный момент пуска, когда Епр = 0, Iяп = (1,4 ... 2,5)Iн. По мере
разгона якоря возрастает Епр, сопротивление реостата выводится.
Пуск с ограниченным пусковым током возможен при питании якоря двигателя от отдельного источника с регулируемым напряжением. Ограничение пускового тока и плавный разгон двигателя обеспечиваются постепенным повышением напряжения на якоре от нуля до требуемого значения. Этот метод находит применение в системах управления и регулирования мощных двигателей постоянного тока.
Автоматизация пускового процесса значительно облегчает управление электродвигателями, устраняет возможные ошибки при пуске
и ведет к повышению производительности механизмов, особенно при
повторно-кратковременном режиме работы.
На рис. 1.1. изображена пусковая диаграмма двигателя с тремя
ступенями пускового реостата, построенная из условий изменения тока в определенных заданных пределах от I1 до I2. Пуск двигателя
 согласно
этой диаграмме может быть произведен
от руки или автоматически. Если пуск
производится с помощью ручного реостата,
то переключение сопротивлений производится
с ориентировкой на показания амперметра
и вольтметра в цепи якоря.
согласно
этой диаграмме может быть произведен
от руки или автоматически. Если пуск
производится с помощью ручного реостата,
то переключение сопротивлений производится
с ориентировкой на показания амперметра
и вольтметра в цепи якоря.
Рис. 1.1.
Автоматическое управление позволяет более точно выдержать заданные условия пуска и освобождает человека от выполнения утомительных операций.
Из рассмотрения диаграмм на рис. 1.1. следует, что выключение
ступеней сопротивления должно происходить при определенной угловой скорости двигателя (I = *n/30), определенной величине тока I2 и через определенные промежутки времени (t1, t2, t3). Очевидно, что управление пуском может быть осуществлено:
а) в функции тока;
б) в функции скорости;
в) в функции времени.
Диаграммы, приведенные на рис. 1.1. иллюстрируют процесс пуска при ступенчатом управлении, осуществляемом при помощи релейно-контакторных аппаратов в схемах так называемого разомкнутого цикла
управления.
Сопротивления ступеней пускового реостата рассчитываются в следующем порядке:
П
 о
паспортным данным ДПТ строится
зависимость
о
паспортным данным ДПТ строится
зависимость
Се*Ф – можно определить из приведенного выражения в номинальном режиме и Rя = Uя/Iяп.
Задаются пределы изменения тока якоря при пуске: I1 =1.4-2.5* Iян, 1.1* Iян <I2 < I1. Следует учитывать, что при уменьшении разницы I1 и I2 число ступеней реостата возрастает и при неизменном I1 увеличивается темп разгона двигателя. При увеличении разницы I1 и I2 и неизменном I1 число ступеней и темп разгона уменьшаются.
Графическим способом определяют необходимое число ступеней пускового реостата рис.1.2. Выполняя эту процедуру не стоит добавлять лишнюю ступень реостата если при переходе на естественную характеристику с последней ступени ток якоря ДПТ незначительно превышает I1.

 n
n

 nн
nн


 n2
n2
 n1
n1

Iян I2 I1 Iя
Рис.1.2
О
 пределяют
суммарное сопротивление пускового
реостата
пределяют
суммарное сопротивление пускового
реостатаО
 пределяют
частоту вращения ДПТ при токе I2
и полностью введенном сопротивлении
пускового реостата
пределяют
частоту вращения ДПТ при токе I2
и полностью введенном сопротивлении
пускового реостатаО
 пределяют
сопротивление первой ступени пускового
реостата. Для этого вычисляют сопротивление
пускового реостата при выведенной
первой ступени из условия n=n2,
Iя=I1:
пределяют
сопротивление первой ступени пускового
реостата. Для этого вычисляют сопротивление
пускового реостата при выведенной
первой ступени из условия n=n2,
Iя=I1:
тогда сопротивление первой ступени реостата
А налогично
определяют сопротивления следующих
ступеней.
налогично
определяют сопротивления следующих
ступеней.
При управлении ступенями реостата в функции времени требуется определить необходимые выдержки времени реле. Определим их из уравнений электромеханического равновесия системы, считая что процессы в цепи якоря происходят за пренебрежимо малое время по сравнению с механическими:
Здесь C-конструктивная постоянная, J- момент инерции системы, Мс-статический момент,R – полное сопротивление якорной цепи.
В ыразив
i
из второго уравнения и заменив
ыразив
i
из второго уравнения и заменив
Получим:
Р
 ешение
этого уравнения, учитывая что для t=0
=нач,
имеет вид:
ешение
этого уравнения, учитывая что для t=0
=нач,
имеет вид:
З ависимость
тока в цепи якоря от времени можно
определить из условия механического
равновесия:
ависимость
тока в цепи якоря от времени можно
определить из условия механического
равновесия:
Ic-ток якоря при Мс.
Подставив в последнее уравнение выражение (4) для начальных условий t=0, I=Iнач получим:

В процессе многоступенчатого пуска ток якоря двигателя колеблется в пределах от I1 до I2. Поэтому :

где tx –время, в течение которого ток двигателя изменяется от I1 до I2, Tмx – электромеханическая постоянная времени для той же ступени (выражение (4)).
Р ешая
последнее уравнение относительно
времени разгона, находим
ешая
последнее уравнение относительно
времени разгона, находим
Для автоматизации пуска ДПТ в функции времени могут быть применены электромагнитное реле времени либо электронные реле времени.
Узел
схемы управления пуском ДПТ в функции
времени представлен на р ис.
1.3.
ис.
1.3.
Рис. 1.3.
При нажатии кнопки SB1 контактор КМ1 своим контактом КМ1.1 подключает якорь двигателя к сети, а контактом КМ1.3 отключает питание от катушки реле КТ1. Падение напряжения от пускового тока на сопротивлении R1 вызывает срабатывание реле КТ2, которое размыкает свой контакт. С определенной выдержкой времени замыкается контакт КТ1.1 реле КТ1, и контактор КМ2 контактом КМ2.1 шунтирует ступень R1 вместе с реле КТ2. Последнее опять с выдержкой времени замыкает свой контакт КТ2.1, что приводит к шунтированию ступени R2.
Управление в функции времени получило широкое применение в
современных электроприводах постоянного и переменного тока благо-
даря своим достоинствам: простоте схемы, надежности и независимости ее работы от колебаний нагрузки или напряжения.
Паспортные данные ДПТ:
Тип двигателя: СЛ-221
Uян = 110В
nян = 3600-4600 об/мин
Iян = 0,35 А
Iв = 0,1 А
Jдв = 0,00055 кг*м2
= 33%
Параметры нагрузки:
Мс=0,1-0,12 н*м
Момент инерции шкивов можно определить из выражения:

Момент инерции всей системы:
Где Ji = Jшк.i + Jдв.i-момент инерции шкива и двигателя на валу которого установлен шкив; i-частота вращения шкива, дв – частота врашения двигателя относительно вала которого рассчитывается момент инерции.
Момент инерции асинхронного двигателя приведён в л.р.7, моментом инерции тахогенератора пренебречь.
1.3. План работы.
1.3.1. Используя паспортные данные ДПТ и параметры кинематической цепи рассчитайте необходимое количество ступеней пускового реостата и сопротивления этих ступеней для обеспечения пуска в диапазоне токов I1= ,I2= .
1.3.2. Рассчитайте необходимые выдержки реле времени К7, К8 для обеспечения пуска по п.1.3.1.
1.3.3. С помощью тестера выставьте расчётные сопротивления пусковых реостатов R7,R8.
1.3.4. Соберите схему рис.1.4. и опытным путём подберите расчётные выдержки времени реле К7,К8 с помощью секундомера и соответствующих регуляторов на лицевой панели стенда. При нажатии кнопки S11 срабатывает пускатель К2 и его размыкающий контакт запускает секундомер ( для настройки К7 собрана вспомогательная схема «первая ступень» рис1.4). Через время выдержки реле К7 оно сработает своим контактом включит реле К3, которое остановит замыкающим контактом секундомер. При настройке реле К8 собирают вспомогательную схему «вторая ступень» рис1.4.
1.3.5. Соберите схему пуска ДПТ в функции времени рис.1.5. Кнопкой S11 осуществите пуск двигателя и с помощью приборов pА1, p зафиксируйте броски тока и соответствующие им частоты вращения в моменты срабатывания пусковых ступеней. Постройте зависимости I=f(t) и n=f(t). Если в процессе пуска токи переключения на разных ступенях резко отличаются, то подберите опытным путем сопротивление ступеней и выдержки, при которых различие токов переключения незначительно отличаются на разных ступенях, и повторите расчет для полученных R7,R8.
1.3.6. Опишите порядок работы схемы рис.1.5.
1.4. Контрольные вопросы.
1.4.1. Какие существуют способы пуска ДПТ?
1.4.2. Какое электромагнитное реле применяется в схеме пуска
ДПТ в функции времени?
1.4.3. Рассказать о принципе действия электромагнитного реле
времени.
1.4.4. Рассказать принцип действия релейно-контакторной схемы пуска ДПТ в функции времени.
1.4.5. Предложите иное схемное решение двухступенчатого пуска ДПТ в функции времени.
Рис.1.4
Рис. 1.5.
Лабораторная работа №2
Снятие и исследование электромеханических характеристик электропривода с ДПТНВ.
2.1.Цель работы.
Изучить устройство двигателя постоянного тока. Записать паспортные данные двигателя.
Испытать двигатель методом нагрузочного генератора, получить его механическую и рабочие характеристики.