

Теоремы о неустойчивости движения
Во всех теоремах об устойчивости в первую очередь требовалась знакоопределенность функции (чтобы обеспечить замкнутость поверхностей уровня этой функции), а уже после этого накладывались условия на знак ее производной. В теоремах же о неустойчивости в первую очередь рассматривается знакоопределенность (знакопостоянство) производной функции Ляпунова в силу уравнений возмущенного движения, чтобы обеспечивать необходимый для доказательства неустойчивости уход изображающей точки из окрестности начала координат за счет неограниченного роста функции .
В первой теореме о неустойчивости – теореме Ляпунова, - требуется знакоопределенность производной, а затем это условие ослабляется – сначала до знакопостоянства (теорема Красовского о неустойчивости). Далее условие на соотношение знаков самой функции и ее производной в силу уравнений возмущенного движения накладывается только в определенной части фазового пространства (теорема Четаева о неустойчивости). Все это становится понятным, если получить определение неустойчивости как отрицание определения устойчивости, записанного с помощью кванторов. Для этого, как известно, в ранее приведенном определении устойчивости следует поменять местами - « для всех» и - «существует», а знак неравенства в заключении определения поменять на противоположный. В результате получим:
![]()
Таким
образом, для
доказательства неустойчивости
достаточно обнаружить единственную
траекторию с начальным условием из
-
окрестности,
уходящую в момент
![]() из
из
![]() -окрестности
начала координат.
-окрестности
начала координат.
Первая
теорема Ляпунова
о неустойчивости: если
для уравнений возмущенного движения
возможно найти функцию
такую,
что
ее полная производная по времени (14)
есть функция знакоопределенная, а сама
функция
не будет знакопостоянной знака,
противоположного с
![]() ,
то невозмущенное движение неустойчиво.
,
то невозмущенное движение неустойчиво.
Теорема
Красовского
о неустойчивости:
если для дифференциальных уравнений
возмущенного движения можно найти
такую функцию, что ее производная в
силу этих уравнений (14) знакоположительна,
причем многообразие точек, для которых
не содержит целых траекторий системы,
кроме начала координат, при
![]() ,
и если в любой сколь угодно малой
окрестности начала координат существуют
точки, для которых
,
и если в любой сколь угодно малой
окрестности начала координат существуют
точки, для которых
![]() ,
то невозмущенное движение неустойчиво.
,
то невозмущенное движение неустойчиво.
Теорема
Четаева
о неустойчивости: Если
дифференциальные уравнения возмущенного
движения позволяют найти функцию
![]() ,
для которой в сколь угодно малой
окрестности нуля существует область
,
ограниченная поверхностью
,
для которой в сколь угодно малой
окрестности нуля существует область
,
ограниченная поверхностью
![]() ,
проходящей через начало координат, и
если производная (14) положительна во
всех точках области
,
то невозмущенное движение неустойчиво.
,
проходящей через начало координат, и
если производная (14) положительна во
всех точках области
,
то невозмущенное движение неустойчиво.
Замечание о знакоопреденности функций.
Определение
11.
Функция
называется однородной формой степени
m
, если
![]() при произвольном
.
Очевидно, знакоопределенность форм
может иметь место только при четном
m
( так как только тогда знак
не влияет на знак
).
При этом минимальной степенью является
m=2
. Понятно также, что в разложении любой
функции в окрестности начала координат
можно выделить формы первого порядка
при произвольном
.
Очевидно, знакоопределенность форм
может иметь место только при четном
m
( так как только тогда знак
не влияет на знак
).
При этом минимальной степенью является
m=2
. Понятно также, что в разложении любой
функции в окрестности начала координат
можно выделить формы первого порядка
![]() , второго порядка
, второго порядка
![]() и т. д.
и т. д.
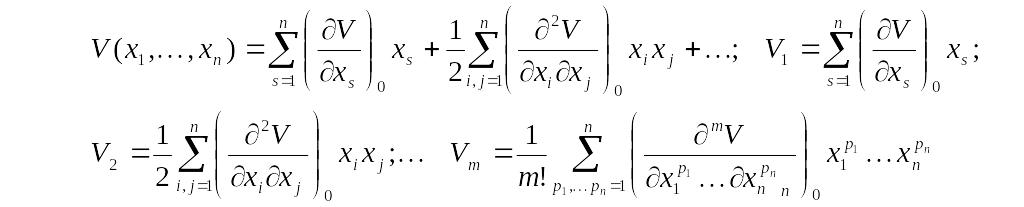
При
малых
![]() знак функции
определяется членами низшего порядка
в ее разложении, т.е. формой низшего
порядка. Поэтому разложение
знакоопределенной
функции может начинаться только
с форм четного
порядка. К сожалению, критерий
знакоопределенности таких форм известен
только для квадратичных форм – это
хорошо известный критерий Сильвестра
– матрица коэффициентов квадратичной
формы должна быть знакоопределенной.
знак функции
определяется членами низшего порядка
в ее разложении, т.е. формой низшего
порядка. Поэтому разложение
знакоопределенной
функции может начинаться только
с форм четного
порядка. К сожалению, критерий
знакоопределенности таких форм известен
только для квадратичных форм – это
хорошо известный критерий Сильвестра
– матрица коэффициентов квадратичной
формы должна быть знакоопределенной.
Критерий Сильвестра: для того, чтобы квадратичная форма была определенно-положительной, необходимо и достаточно, чтобы все главные диагональные миноры матрицы ее коэффициентов были положительны.
Метод Четаева построения функций Ляпунова в виде связки интегралов. Общих методов построения функций, удовлетворяющих условиям теорем прямого метода Ляпунова нет. Приведем один из наиболее сильных методов построения таких функций.
Пусть уравнения возмущенного движения допускают первый интеграл
![]() .
(15)
.
(15)
Если
разность
![]() является определенно-положительной
функцией переменных
,
то в качестве функции Ляпунова можно
взять
является определенно-положительной
функцией переменных
,
то в качестве функции Ляпунова можно
взять
![]() =
=![]() .
Производная
этой функции по времени в силу уравнений
возмущенного движения равна нулю
согласно определению интеграла и,
следовательно, такая функция удовлетворяет
всем условиям теоремы Ляпунова об
устойчивости движения.
.
Производная
этой функции по времени в силу уравнений
возмущенного движения равна нулю
согласно определению интеграла и,
следовательно, такая функция удовлетворяет
всем условиям теоремы Ляпунова об
устойчивости движения.
В некоторых случаях уравнения возмущенного движения допускают несколько первых интегралов:
![]() ,
. . . ,
,
. . . ,
![]() ,
,
где
![]() - постоянные интегрирования. Пусть ни
один из них не является знакоопределенной
функцией. Для таких систем Н.Г. Четаев
предложил строить функцию Ляпунова с
помощью связки интегралов
- постоянные интегрирования. Пусть ни
один из них не является знакоопределенной
функцией. Для таких систем Н.Г. Четаев
предложил строить функцию Ляпунова с
помощью связки интегралов
![]() ,
,
где
![]() - неопределенные постоянные, выбором
которых нужно распорядиться так, чтобы
полученная функция была знакоопределенной.
Если это удастся сделать, то, согласно
теореме Ляпунова будем иметь устойчивость
невозмущенного движения, поскольку
- неопределенные постоянные, выбором
которых нужно распорядиться так, чтобы
полученная функция была знакоопределенной.
Если это удастся сделать, то, согласно
теореме Ляпунова будем иметь устойчивость
невозмущенного движения, поскольку
![]() .
.
При
построении связки интегралов один из
![]() коэффициентов
коэффициентов
![]() можно выбрать произвольно, например,
положив
можно выбрать произвольно, например,
положив
![]() .
Часто
функцию
.
Часто
функцию
![]() можно
выбрать в виде линейной связки интегралов,
положив все
можно
выбрать в виде линейной связки интегралов,
положив все
![]() ,
подбирая остальные коэффициенты так,
чтобы линейные члены в разложении
полученной функции в ряд в окрестности
начала координат обращались в нуль.
,
подбирая остальные коэффициенты так,
чтобы линейные члены в разложении
полученной функции в ряд в окрестности
начала координат обращались в нуль.
Во многих механических задачах интегралы уравнений движения можно построить при помощи общих теорем механики, не составляя самих уравнений. Понятно, что этот прием позволяет значительно упростить решение задачи об устойчивости.