

§4.5 Выбор типа и параметров настройки регуляторов для объектов с запаздыванием
Приближенные
модели динамики объектов управления.
Переходные
характеристики технологических объектов
управления по управляющему воздействию
обычно представляют собой монотонные
функции времени (рис.4.15). В первом случае
(см. рис. 4.15,а)
![]() стремится к некоторому постоянному
значению, а во втором случае (см.
рис.4.15,б)
с течением времени увеличивается по
закону, близкому к линейному. Объекты,
обладающие переходными характеристиками
рассматриваемых типов, соответственно
называют статическими (с самовыравниванием,
с саморегулированием) и астатическими
(без самовыравнивания).
стремится к некоторому постоянному
значению, а во втором случае (см.
рис.4.15,б)
с течением времени увеличивается по
закону, близкому к линейному. Объекты,
обладающие переходными характеристиками
рассматриваемых типов, соответственно
называют статическими (с самовыравниванием,
с саморегулированием) и астатическими
(без самовыравнивания).

а )
h(t)
б) h(t)
)
h(t)
б) h(t)
K В
0,63К 2 1
С
D t2
0![]()
![]() A
tв
t
A
tв
t
’ 0.11Т
![]()
![]()
![]()
![]() 0
T
t
0
T
t
Рис. 4.15 Переходные характеристики статического (а) и астатического (б)
объекта управления
В начальной части наблюдается в большей или меньшей степени выраженное запаздывание, т.е. регулируемая величина начинает интенсивно изменяться не сразу, а спустя некоторое время после приложения входного воздействия.
При
решении практических задач автоматизации
динамические характеристики объектов
с самовыравниванием описывают упрощенной
моделью, состоящей из апериодического
звена первого или второго порядка и
звена запаздывания. Модель первого
порядка содержит следующие параметры,
подлежащие идентификации: коэффициент
передачи
,
постоянная времени
![]() и время запаздывания
и время запаздывания
![]() .
Запаздывание в общем случае (рис.4.15,а)
складывается из чистого (транспортного)
запаздывания
.
Запаздывание в общем случае (рис.4.15,а)
складывается из чистого (транспортного)
запаздывания
![]() и переходного
и переходного
![]() .
Параметры
и
определяются проведением касательной
.
Параметры
и
определяются проведением касательной
![]() в точке
перегиба
.
Коэффициент передачи
равен отношению установившегося значения
выходной координаты к значению
ступенчатого входного воздействия.
в точке
перегиба
.
Коэффициент передачи
равен отношению установившегося значения
выходной координаты к значению
ступенчатого входного воздействия.
Модель
первого порядка с параметрами
и
дает слишком
грубое приближение к рассматриваемому
объекту. Более точную аппроксимацию
можно получить, полагая постоянную
времени
![]() ,
а время запаздывания
,
а время запаздывания
![]() =
–
=
–
![]() .
.
В классе моделей второго порядка достаточно хорошее приближение рассматриваемого типа дает с одинаковыми постоянными времени:
![]() ,
,
где
![]() ;
=
–
.
;
=
–
.
Такой
модели соответствует кривая 2
(см.рис.4.15,а), которая начинается в точке
![]() .
Почти все запаздывание в этом случае
рассматривается как чистое.
.
Почти все запаздывание в этом случае
рассматривается как чистое.
Если
h(t)
приближается к установившемуся значению
сравнительно медленно, пересекая
вертикаль из точки
![]() ниже значения
ниже значения
![]() ,
то более точную аппроксимацию может
обеспечить
с различными постоянными времени:
,
то более точную аппроксимацию может
обеспечить
с различными постоянными времени:
![]() .
.
При
этом
![]() и
и
![]() определяются следующим образом: по
ординате
определяются следующим образом: по
ординате
![]() экспериментальной переходной
характеристики находят
экспериментальной переходной
характеристики находят
![]() ,
отсчитываемое от точки
,
отсчитываемое от точки
![]() ,
т.е. без учета чистого запаздывания.
Затем вычисляют
,
т.е. без учета чистого запаздывания.
Затем вычисляют
![]() и
и
![]() .
Такая аппроксимация целесообразна,
когда
.
Такая аппроксимация целесообразна,
когда
![]() .
.
Типовые
законы регулирования.
Аппроксимация динамических характеристик
объектов типовыми зависимостями
позволяет все возможное разнообразие
требуемых алгоритмов регулирования
свести к нескольким типовым законам
(алгоритмам), которые в основном и
используются на практике. Закон
регулирования – это математическая
зависимость, которая позволяет определять
регулирующее воздействие
![]() по сигналу рассогласования
по сигналу рассогласования
![]() .
.
Широкое применение находят типовые непрерывные линейные законы регулирования: пропорциональный (П), интегральный (И), пропорционально-интегральный (ПИ), пропорционально - интегрально - дифференциальный (ПИД). Регуляторы, работающие по этим алгоритмам, называют соответственно П - , И-, ПИ - и ПИД - регуляторами. Типовые законы регулирования отражают не фактическую, а желаемую динамику регулятора. Коэффициенты и постоянные времени, входящие в законы регулирования, называют параметрами настройки. Типовые регуляторы описываются следующими передаточными функциями:
![]() П – регулятор;
П – регулятор;
![]() И
– регулятор;
И
– регулятор;
 ПИ
– регулятор;
ПИ
– регулятор;
 ПИД
– регулятор,
ПИД
– регулятор,
где
![]() ,
,
,
,
![]() ,
– соответственно коэффициент передачи,
постоянная интегрирования (изодрома)
и постоянная дифференцирования
(предварения, упреждения) регулятора,
являющиеся параметрами настройки.
,
– соответственно коэффициент передачи,
постоянная интегрирования (изодрома)
и постоянная дифференцирования
(предварения, упреждения) регулятора,
являющиеся параметрами настройки.
Регуляторы
могут быть реализованы аппаратно,
программно–аппаратно или программно.
В состав аппаратных регуляторов входят
балластные звенья
![]() ,
включенные последовательно с указанными
передаточными функциями.
,
включенные последовательно с указанными
передаточными функциями.
На рис.4.16 приведены переходные характеристики типовых алгоритмов регулирования, определяющие динамику воздействия регулятора на объект управления.
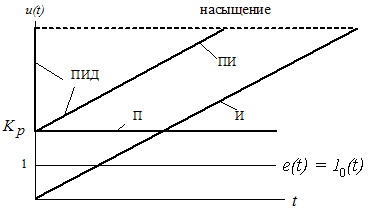
Рис. 4.16 Переходные характеристики типовых законов регулирования
Сравнительная
характеристика типовых законов
регулирования.
П–регулятор перемещает регулирующий
орган (РО) пропорционально отклонению
регулируемой величины от заданного
значения
![]() .
.
В
динамическом отношении этот регулятор
является безынерционным звеном,
коэффициент передачи которого
численно равен перемещению РО при
единичном отклонении регулируемой
величины. Настроечный параметр регулятора
часто представляют не в форме
![]() ,
а в виде величины
,
а в виде величины
![]() ,
обратной коэффициенту передачи. Величину
называют степенью неравномерности или
диапазоном дросселирования (в
пневматических регуляторах). Степень
неравномерности, выраженная в процентах,
определяет диапазон пропорциональности
регулятора и показывает, какому отклонению
регулируемой величины (в процентах от
максимально возможной для данной САР)
соответствует перемещение РО из одного
крайнего положения в другое.
,
обратной коэффициенту передачи. Величину
называют степенью неравномерности или
диапазоном дросселирования (в
пневматических регуляторах). Степень
неравномерности, выраженная в процентах,
определяет диапазон пропорциональности
регулятора и показывает, какому отклонению
регулируемой величины (в процентах от
максимально возможной для данной САР)
соответствует перемещение РО из одного
крайнего положения в другое.
Реальная
статическая характеристика П–регулятора
имеет нелинейный вид и содержит «зону
насыщения» с уровнями
![]() и
и
![]() (рис.4.17), определяющую диапазон
пропорциональности регулятора.
(рис.4.17), определяющую диапазон
пропорциональности регулятора.

Рис.4.17 Статическая характеристика П–регулятора
Основным достоинством П–регуляторов является простота их реализации и настройки. При появлении возмущающих воздействий такой регулятор быстро приводит в равновесное состояние практически любой промышленный объект. Однако в регуляторах этого типа положение РО однозначно связано с отклонением регулируемого параметра от заданного значения, поэтому неизбежна статическая ошибка. Наличие этой ошибки – основной недостаток П–регуляторов.
Аппаратные
П–регуляторы по динамическим
характеристикам приближенно соответствуют
апериодическому звену первого порядка,
что обусловлено наличием балластного
звена
![]() .
Чем меньше
.
Чем меньше
![]() ,
тем ближе процесс на выходе регулятора
к идеальному.
,
тем ближе процесс на выходе регулятора
к идеальному.
Для увеличения запасов устойчивости, уменьшения статической ошибки в САУ применяют модификацию П–алгоритма следующего вида:
![]() ,
,
где
![]() коэффициент
усиления по цепи формирования задания
.
коэффициент
усиления по цепи формирования задания
.
Введение
члена
![]() в алгоритмы управления широко практикуется,
особенно для промышленных систем со
скачкообразным изменением задания
,
что характерно, например, для систем
программного управления.
в алгоритмы управления широко практикуется,
особенно для промышленных систем со
скачкообразным изменением задания
,
что характерно, например, для систем
программного управления.
И–регуляторы
перемещают РО пропорционально интегралу
от отклонения регулируемой величины
 .
.
По своим динамическим свойствам И–регулятор подобен интегрирующему звену. Коэффициент передачи численно равен скорости перемещения РО при отклонении регулируемой величины на единицу ее измерения. Регулятор этого типа перемещает РО до тех пор, пока регулируемая величина не достигнет заданного значения, т.е. САР с И–регулятором не имеет статической ошибки и является астатической.
Реально
интегральный алгоритм управления по
своим динамическим свойствам с большей
точностью описывается реальным
интегрирующим звеном
 ,
с «зоной насыщения», которая пунктиром
показана на рис.4.16.
,
с «зоной насыщения», которая пунктиром
показана на рис.4.16.
По аналогии с модифицированным П–алгоритмом формируется модифицированный И–алгоритм управления
 .
.
И–регуляторы могут устойчиво регулировать лишь объекты, обладающие самовыравниванием. Этому типу регуляторов свойственна относительно невысокая скорость регулирования, причем она тем меньше, чем больше величина .
Обычно И–регулятор используют не для непосредственного управления объектом, а для формирования более сложных законов регулирования, например ПИ– и ПИД–регуляторов.
ПИ–регуляторы
сочетают преимущества П– и И–регуляторов
и позволяют устойчиво и без статической
ошибки регулировать работу большого
числа промышленных объектов. Указанные
преимущества и относительная простота
обеспечили этому типу регуляторов
наибольшее распространение в
промышленности. Алгоритм управления
 имеет два параметра настройки –
и
.
имеет два параметра настройки –
и
.
В
ПИ–регуляторе после скачкообразного
изменения сигнала рассогласования РО
под действием пропорциональной
составляющей мгновенно переходит из
первоначального состояния в новое
положение, определяемое произведением
![]() ,
а затем под действием интегральной
составляющей перемещается с постоянной
скоростью
,
а затем под действием интегральной
составляющей перемещается с постоянной
скоростью
![]() .
С увеличением
влияние интегральной составляющей на
процесс регулирования уменьшается.
.
С увеличением
влияние интегральной составляющей на
процесс регулирования уменьшается.
Реальный ПИ–алгоритм, как П и И–алгоритмы, содержит в своей структуре балластное апериодическое звено и имеет зону насыщения (рис.4.16). Модифицированный ПИ–алгоритм содержит дополнительный член .
ПИ–регуляторы
называют также изодромными, поскольку
они впервые были применены для обеспечения
постоянной скорости вращения вала
паровой машины. Соответственно
часто называют временем изодрома или
временем «удвоения», т.к. за время
сигнал
удваивается по сравнению с начальным
значением
![]() .
.
ПИД–регуляторы
воздействуют на ОУ пропорционально
отклонению регулируемой величины,
интегралу от этого отклонения и скорости
изменения регулируемой величины:
 .
.
ПИД–регуляторы называют изодромными регуляторами с предварением, так как они реагируют не только на отклонение регулируемой величины от заданного значения, но и на тенденцию ее изменения.
При скачкообразном изменении регулируемой величины идеальный ПИД–регулятор в начальный момент времени оказывает мгновенное бесконечно большое (теоретически) по амплитуде воздействие на ОУ, затем величина воздействия падает до значения, определяемого пропорциональной частью регулятора. В дальнейшем ПИД–регулятор по механизму воздействия на ОУ становится подобным ПИ–регулятору (рис.4.16). Введение в законы регулирования дифференцирующей составляющей повышает эффект регулирования при действии на объект значительных переменных возмущений.
У аппаратных ПИД–регуляторов передаточная функция балластного звена обычно имеет вид
![]() .
.
Чем
меньше
и
![]() ,
тем ближе процесс на выходе регулятора
к идеальному.
,
тем ближе процесс на выходе регулятора
к идеальному.
Улучшение качественных показателей работы САУ при скачкообразных изменениях задания , что характерно для пусковых режимов САУ и систем программного управления, достигается использованием модифицированных ПИД–алгоритмов управления:
 ,
,
в которых производная от сигнала рассогласования заменяется производной от регулируемой величины.
Частным случаем ПИД–регулятора является ПД–регулятор
![]() .
.
Использование ПД–алгоритмов позволяет сделать структурно неустойчивые САУ структурно устойчивыми, в частности, обеспечивают устойчивость регулирования объектами с астатизмом второго порядка.
Расчет параметров настройки типовых регуляторов. Регулятор Ресвика позволяет оценить предельные возможности управления объектами с запаздыванием.
В качестве примера рассмотрим управление объектом чистого запаздывания
![]() .
.
Регулятор
Ресвика для рассматриваемого объекта
при
![]() принимает вид
принимает вид
 .
(4.11)
.
(4.11)
При
высокочастотных воздействиях регулятор
(4.11) действует как дискретный: после
очередного изменения управляющего
воздействия
не изменяется в течение интервала
![]() и тем самым
повышается устойчивость системы.
и тем самым
повышается устойчивость системы.
Если внешнее воздействие изменяется медленно, то допустима замена
![]() (4.12)
(4.12)
и идеальный регулятор эквивалентен идеальному интегрирующему звену
 .
.
Из приведенного примера следует, что для объектов, описываемых идеальным звеном запаздывания целесообразно использовать И–регулятор с коэффициентом передачи обратно пропорциональным коэффициенту передачи объекта и времени запаздывания.
Используем регулятор Ресвика для выбора типа и параметров настройки регуляторов для инерционных объектов первого и второго порядка с запаздыванием
![]()
![]()
Параметры K0, Т0 и τ0 могут быть определены по экспериментальной переходной характеристике объекта (см. начало §4.4).
Передаточную
функцию регулятора Ресвика запишем в
упрощенной форме, полагая в (4.5)
![]()
 .
.
Для объекта с инерционной частью первого порядка, принимая допущение (4.7), получим ПИ – регулятор с настроечными параметрами:
![]() ;
;
![]() .
.
Для объекта второго порядка следует рекомендовать ПИД – регулятор со следующими настроечными параметрами:
 ;
;
![]() ;
;
 .
.
В настоящее время продолжают совершенствовать методы синтеза систем управления на основе различных критериев управления. В инженерной практике получил распространение критерий максимальной степени устойчивости, позволяющий синтезировать линейные регуляторы при ограниченной информации о состоянии объекта.
Рассмотрим,
следуя А.М.Шубладзе, важный для
автоматизации технологических процессов
пример расчета оптимальных по степени
устойчивости ПИ-регуляторов
 для управления объектом, описываемым
передаточной функцией вида
для управления объектом, описываемым
передаточной функцией вида
 .
.
Для
рассматриваемого примера оптимальные
значения степени устойчивости
![]() и параметров настройки регуляторов в
первом приближении находятся из уравнений
и параметров настройки регуляторов в
первом приближении находятся из уравнений

![]() ;
;
![]() .
.
При изучении материала полезно сравнить методом моделирования показатели качества ПИ законов управления объектами первого порядка с запаздыванием, параметры настройки которых рассчитаны на основе критерия максимальной степени устойчивости и использования регулятора Ресвика.
На основе идеального регулятора для объектов с запаздыванием можно выбрать для каждого конкретного случая типовой регулятор и предварительно определить параметры его настройки.
Заключение.
Динамические характеристики промышленных
объектов, обладающих самовыравниванием,
удовлетворительно описываются
апериодическим звеном первого или
второго порядка с запаздыванием. Для
объектов с запаздыванием и без
запаздывания, инерционная часть которых
близка звену первого порядка, целесообразно
выбирать ПИ – регулятор; если инерционная
часть имеет порядок
![]() ,
то – ПИД – регулятор. Указанные алгоритмы
для рассматриваемых объектов обеспечивают
квазиоптимальное управление, минимизирующее
интегральный критерий качества.
,
то – ПИД – регулятор. Указанные алгоритмы
для рассматриваемых объектов обеспечивают
квазиоптимальное управление, минимизирующее
интегральный критерий качества.