

Глава 4 синтез линейной системы автоматического управления
§4.1 Корректирующие устройства и схемы их включения
Каждая САУ должна отвечать ряду требований, включая обеспечение устойчивости, точности в установившихся режимах и качества переходных процессов. В зависимости от назначения и требований к системе отдельные частные задачи становятся основными, а другие выполняются без особых трудностей.
В частности, запас устойчивости в системах стабилизации может быть значительно меньше, чем в следящих системах. Это связано с частотой изменений задающих воздействий: в системах стабилизации задающие воздействия постоянны или редко изменяются, а в следящих системах – изменяются непрерывно или весьма часто. На величину рационального запаса устойчивости влияет и нестабильность параметров системы.
К следящим системам и системам программного управления предъявляются повышенные по сравнению с системами стабилизации требования по быстродействию и ошибкам воспроизведения задающих воздействий. В любом случае требования по быстродействию должны соответствовать мощности исполнительного устройства.
Если нужных свойств системы не удается обеспечить изменением коэффициентов передачи и постоянных времени отдельных звеньев, то в систему вводят корректирующие устройства.
Корректирующие устройства. По схеме включения различают последовательные, параллельные и параллельно-встречные корректирующие устройства.
В зависимости от наличия усилителя в схеме корректирующего устройства последние разделяют на пассивные и активные.
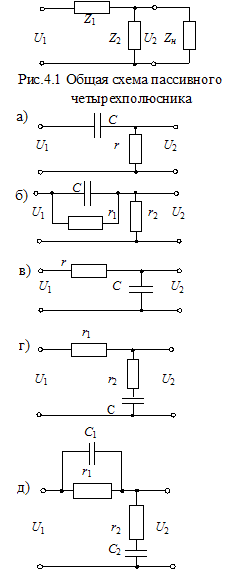
Пассивные корректирующие устройства постоянного тока - это электрические цепи (четырехполюсники) из конденсаторов, резисторов и индуктивностей. Четырехполюсники переменного тока выполняют из резисторов и конденсаторов.
Если
выходное напряжение
![]() пассивного четырехполюсника, общая
схема которого приведена на рис.4.1,
приложено к нагрузке с бесконечно
большим полным сопротивлением
пассивного четырехполюсника, общая
схема которого приведена на рис.4.1,
приложено к нагрузке с бесконечно
большим полным сопротивлением
![]() ,
то передаточная функция четырехполюсника
,
то передаточная функция четырехполюсника
 ,
,
где
![]() и
и
![]() – операторы сопротивлений четырехполюсника.
– операторы сопротивлений четырехполюсника.
![]() ,
где
,
где
![]()
![]() ,
где
,
где
![]()
![]() ,
где
,
где
 ,
где
,
где
![]() ;
;
![]()
![]()
где
![]() ;
;
![]() ;
;
![]()
Рис.4.2 Примеры пассивных четырехполюсников постоянного тока
В
общем виде каждый из операторов включает
в себя активное сопротивление
![]() ,
емкость
,
емкость
![]() и индуктивность
и индуктивность
![]() :
:
 ;
;
 .
.
Отдельные примеры пассивных четырехполюсников рассматривались в §3.2. Принято различать пассивные дифференцирующие (рис.4.2 б), интегрирующие (рис.4.2 г) и интегродифференцирующие (рис.4.2 д) четырехполюсники. Интегродифференцирующие четырехполюсники в одном диапазоне интегрируют сигнал, а в другом – дифференцируют его.
Высокая стабильность параметров и низкая стоимость – основные достоинства пассивных корректирующих устройств. Однако они ослабляют сигнал, а их характеристики зависят от нагрузки.
Пассивные четырехполюсники переменного тока обеспечивают приближенное дифференцирование огибающей модулированного напряжения несущего сигнала. Однообразие свойств таких корректирующих устройств и зависимость характеристик от изменения несущей частоты ограничивают область их использования. Применение пассивных четырехполюсников постоянного тока в системах переменного тока требует предварительного выпрямления модулированного сигнала фазочувствительным демодулятором, отфильтровывания высших гармоник и последующего превращения модулятором преобразованного сигнала постоянного тока в модулированный сигнал переменного тока.
Активные четырехполюсники позволяют осуществлять почти идеальное дифференцирование и интегрирование сигнала, иметь значительный коэффициент передачи, выполнять суммирование нескольких сигналов.
Активные
четырехполюсники служат элементной
базой аналоговых вычислительных машин.
Основным элементом активного
четырехполюсника (рис.4.3) является
операционный (решающий) усилитель –
электронный усилитель постоянного
тока с большим (![]() и более) коэффициентом усиления,
охваченный отрицательной обратной
связью.
и более) коэффициентом усиления,
охваченный отрицательной обратной
связью.
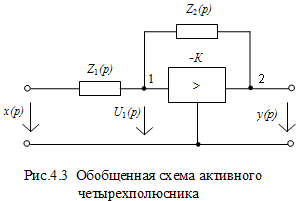 При
выводе передаточной функции активного
четырех-полюсника усилитель предпола-гается
идеальным; его входное сопротивление
между зажимами 1–0 бесконечно велико,
а выходное напряжение
При
выводе передаточной функции активного
четырех-полюсника усилитель предпола-гается
идеальным; его входное сопротивление
между зажимами 1–0 бесконечно велико,
а выходное напряжение
![]() (4.1)
(4.1)
не зависит от нагрузки. Последнее означает, что внутреннее сопротивление усилителя между зажимами 2–0 принимается равным нулю. Применяя принцип наложения, получим
 .
(4.2)
.
(4.2)
Решая
(4.1) и (4.2) относительно
![]() ,
получаем
,
получаем
![]() =
=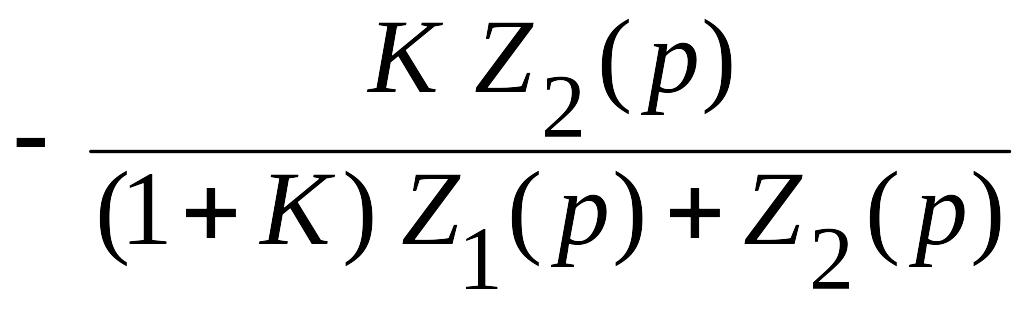 .
.
При
![]() последнее выражение существенно
упрощается
последнее выражение существенно
упрощается
 .
.
Выбирая соответствующим образом и , можно получить модели различных звеньев.
Если
![]() ,
а
,
а
![]() ,
то получим масштабный блок, который
умножает входной сигнал на постоянный
коэффициент
,
то получим масштабный блок, который
умножает входной сигнал на постоянный
коэффициент
 .
При
.
При
![]() масштабный усилитель выполняет функцию
инвертора.
масштабный усилитель выполняет функцию
инвертора.
Если
,
а
![]() ,
т.е. обратная связь образована емкостью
С, то получим модель идеального
интегрирующего звена
,
т.е. обратная связь образована емкостью
С, то получим модель идеального
интегрирующего звена
 .
.
Помимо рассмотренных электрических преобразователей в корректирующих устройствах используются дифференцирующие трансформаторы, тахогенераторы и другие элементы. Реже используются механические, гидравлические, пневматические и иные преобразователи.
Последовательные корректирующие устройства наибольшее применение находят в системах постоянного тока, причем включают их в прямую цепь передачи как правило после предварительного усиления сигнала.
Параллельные
корректирующие устройства используют
в тех случаях, когда при меньшей сложности
они обеспечивают нужное преобразование
сигнала. Например, реальное форсирующее
звено
![]() можно получить, включая параллельно
безынерционное и апериодическое звенья:
можно получить, включая параллельно
безынерционное и апериодическое звенья:
где
![]() ;
;
 .
.
При
малой разности
![]() получается реальное форсирующее звено
с большой постоянной времени
дифференцирования.
получается реальное форсирующее звено
с большой постоянной времени
дифференцирования.
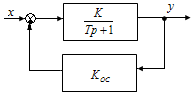
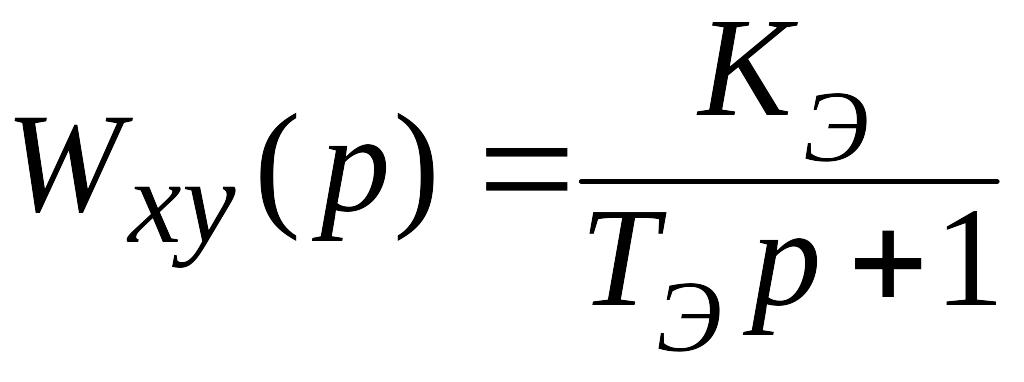
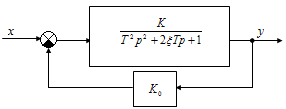
Корректирующие устройства в виде местной обратной связи обладают рядом достоинств, обеспечивающих их широкое применение. Рассматривая типовую схему соединения с обратной связью (рис.4.4), получим
![]()
Е сли
в необходимом диапазоне частот справедливо
неравенство
сли
в необходимом диапазоне частот справедливо
неравенство
![]() ,
(4.3)
,
(4.3)
то
![]() .
.
Это
означает, что при выполнении условия
(4.3) свойства участка цепи, охваченного
обратной связью, определяются в основном
характеристиками корректирующего
устройства. При этом несущественные
нелинейности участка прямой цепи и
нестабильность параметров
![]() не сказываются на свойствах системы.
Если вход корректирующего устройства
подключается к выходу исполнительного
элемента или усилителя мощности, то в
обратной связи могут использоваться
мощные сигналы, не требующие дополнительного
усиления.
не сказываются на свойствах системы.
Если вход корректирующего устройства
подключается к выходу исполнительного
элемента или усилителя мощности, то в
обратной связи могут использоваться
мощные сигналы, не требующие дополнительного
усиления.
Если обратная связь действует только в переходном режиме, то ее называют гибкой, а если в переходном и установившемся режимах, то жесткой.
Гибкую
обратную связь реализуют, используя
идеальное дифференцирующее
![]() или реальное дифференцирующее
или реальное дифференцирующее
![]() звенья.
звенья.
Жесткую
обратную связь часто образуют, используя
безынерционное звено
![]() или апериодическое звено первого
порядка.
или апериодическое звено первого
порядка.
![]()
Рассмотрим наиболее характерные примеры.
 ,
,
где![]() ,
,
![]() .
.
Рис.4.5 Апериодическое звено, охваченное безынерционным звеном
Таким образом, жесткая обратная связь, не изменяя структуру апериодического звена, уменьшает постоянную времени и передаточный коэффициент звена.
![]()
 ,
,
где
![]() .
.
Рис.4.6 Апериодическое звено, охваченное дифференцирующим звеном
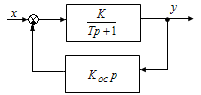
Гибкая отрицательная обратная связь не изменяет структуру и коэффициент передачи апериодического звена, но увеличивает его инерционность. Положительная гибкая обратная связь повышает быстродействие (форсирует выходной сигнал).
 ,
,
где
![]() ;
;
![]()
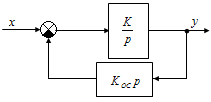
Рис.4.7 Интегрирующее звено, охваченное безынерционным звеном
Жесткая обратная связь превращает интегрирующее звено в апериодическое, что приводит к уменьшению порядка астатизма системы, улучшению ее устойчивости и качества переходного процесса.
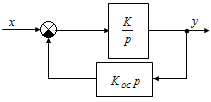
![]() ,
,
где
Рис.4.8 Интегрирующее звено, охваченное дифференцирующим звеном
Гибкая обратная связь не изменяет структуру интегрирующего звена, но уменьшает коэффициент передачи, что равносильно увеличению постоянной времени интегрирования.
 ,
,
где
![]() ;
;
 ;
;
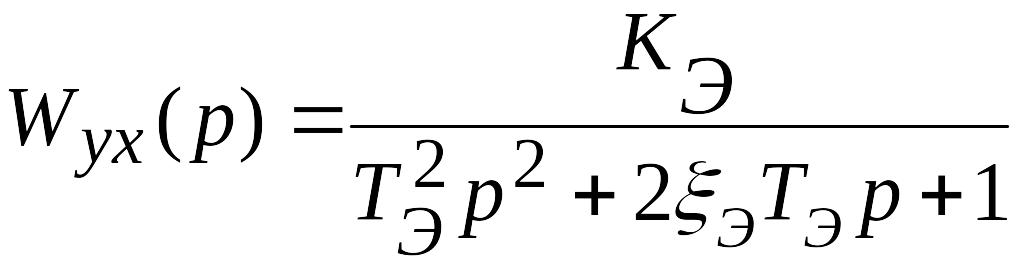
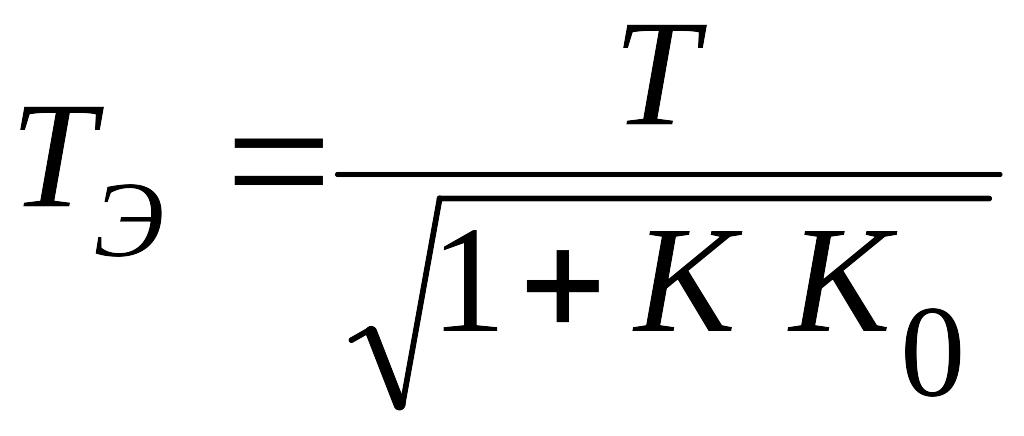
Рис.
4.9
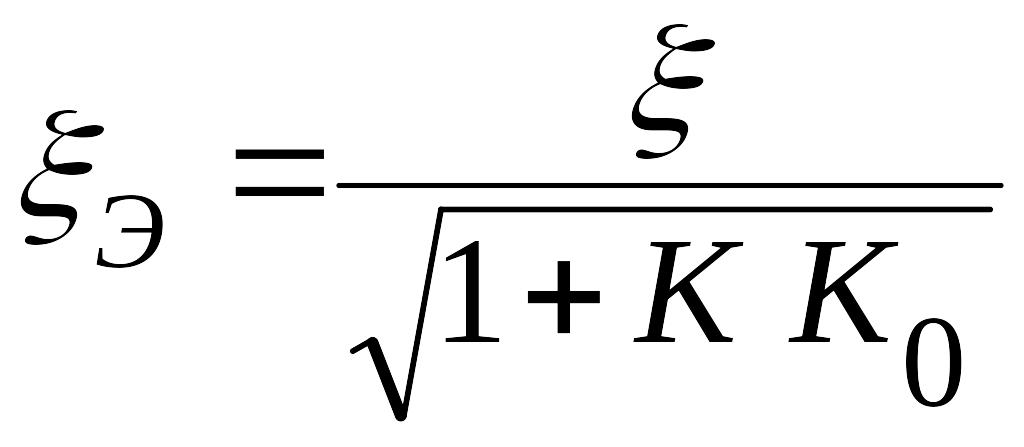 .
.
Жесткая обратная связь не изменяет структуру колебательного звена, но уменьшает коэффициент передачи, постоянную времени и коэффициент демпфирования, что нежелательно, так как может способствовать росту колебательности системы в целом.
 ,
,
где
![]() .
.
Рис.4.10 Колебательное звено, охваченное дифференциальным звеном
Гибкая обратная связь не изменяет коэффициент передачи колебательного звена, но повышает коэффициент демпфирования, что может превратить колебательное звено в апериодическое звено второго порядка.
 x
y
x
y
 ,
,
где
![]() ;
;
Рис. 4.11 Безынерционное звено, охваченное апериодическим звеном
Инерционность отрицательной обратной связи приводит к увеличению быстродействия системы за счет замедления роста сигнала обратной связи на ее входе, что эквивалентно введению форсирующего воздействия по производной.
Рассмотренные примеры показывают, что местные обратные связи могут существенно менять динамические свойства звена прямой связи.
Заключение. Корректирующие устройства являются основным способом повышения качества линейных непрерывных систем регулирования по отклонению. В системе могут одновременно использоваться два или три корректирующих устройства. Используя эквивалентные передаточные функции типовых соединений звеньев можно составить формулы для замены последовательного корректирующего устройства последовательным и параллельным соединениями звеньев или параллельными и встречно-параллельным соединениями звеньев. Перспективен вариант одновременного использования корректирующих устройств, включенных в прямой канал передачи информации и местные обратные связи.