

1.3. Систематизация проблем интеллектуального управления дорожным движением и способов их решения
Управление дорожным движением как сложный многоаспектный процесс содержит в себе множество проблем, которые решаются специалистами данной области. На Рисунке 1 приведены основные проблемы управления дорожным движением.
Из общих принципов управления системами известно, что для решения существующих проблем и улучшения условий движения транспорта необходимо иметь достоверную информацию о складывающейся дорожно-транспортной ситуации. Следовательно, одной из основных проблем, стоящих перед разработчиками ИТС, следует считать проблему сбора достоверной информация о состоянии дорожного движения. Для этого систему обычно оснащают анализаторами транспортных потоков. Наиболее универсальными можно считать проборы, которые анализируют видеоизображение транспортного потока. При этом существует проблема распознавания образов (чаще всего – образов транспортных средств и их номерных знаков).
Рисунок 1. Проблемы управления дорожным движением
Рассмотрим более подробно вопросы решения задачи распознавания образов, а также детально один из методов, который может быть применен при решении проблем анализа транспортных протоков в ИТС.
Сегментация изображения является одним из важнейших этапов в задачах распознавания образов, которые решаются в том числе и при создании ИТС. Целью сегментации является нахождение границ однородных областей на изображении. Качество проведенной сегментации определяет результат и время выполнения всей работы по распознаванию изображения. Сегментация изображений может проводиться с использованием дистанционных преобразований, методов гистограммного анализа, различного рода фильтрации, моментных функций, спектрального анализа, математической морфологии.
Пороговая обработка изображений является одним из фундаментальных подходов к сегментации изображений, завоевавших популярность в системах, требующих быстрого принятия решения.
Одной из наиболее актуальных и сложных задач обработки информации от видеодатчиков является выделение и распознавание (захват) движущихся объектов и их последующее автоматическое сопровождение в условиях действия различного рода помех и возмущений и создание на этой основе информационно-телекоммуникационной системы, осуществляющей мониторинг наземной обстановки. В ИТС основными объектами, которые требуется распознать, являются транспортные средства. Главная задача подобных систем — информировать оператора о сложившейся ситуации в контролируемой зоне и/или реализовать заранее предусмотренные программно заложенные действия исполнительными механизмами системы.
Процесс построения информационно-телекоммуникационных систем предполагает цифровую обработку изображения с целью выделения значимой информации, ее анализ для решения задач, определяемых целевым назначением системы, а также передачу обработанных данных на КП по каналам телекодовой связи с ограниченной пропускной способностью в условиях воздействия помех.
Обзор отечественных и зарубежных публикаций показывает, что наибольшее распространение в существующих и перспективных разработках получили системы сбора информации, в которых видеодатчиками служат матрицы светочувствительных элементов, а именно приборы с зарядовой связью (ПЗС). Поэтому для решения задач управления системой в первую очередь необходимо провести анализ представления трехмерных динамических сцен с помощью двухмерных проекций – изображений, получаемых с помощью матриц ПЗС.
Учитывая, что при дистанционном управлении системой оператору КП приходится принимать решения в реальном масштабе времени при недостаточно полной информации о наземной обстановке и воздействии разного рода помех и искажений, становится очевидным необходимость автоматизации процессов обработки изображений.
Целью автоматической обработки изображений в системе дистанционного управления и контроля состояния системы является улучшение качества изображений и/или статистическая оценка определенных аспектов последовательности динамических изображений наземной обстановки, которые не поддаются непосредственному наблюдению в исходной форме. В любом случае требуется осуществить «объединение» системы сбора информации (ССИ) РК с оператором КП. Реализация такого объединения предполагает исследование математических моделей источников изображений.
Отличительной особенностью задач обработки, анализа и идентификации динамических изображений является их многомерность. В простейшем случае изображение характеризуется двумя пространственными координатами, к которым добавляется третья - временная.
Рассмотрим
модель формирования изображений. В общем
случае для системы сбора информации
(ССИ) РК источником информации о состоянии
наблюдаемого пространства является
неоднородное и нестационарное световое
поле. С позиций зрительного восприятия
световое поле в каждой точке пространства
характеризуется яркостью, цветовым
тоном и насыщенностью, которые могут
меняться во времени. Это поле можно
представить также спектральной функцией
потока излучения в направлении наблюдателя
(измерителя) или распределением
освещенности в плоскости чувствительного
элемента видеодатчика. На практике
часто используются монохромные
(одноцветные) изображения. Их можно
описать некоторой функцией яркости
![]() ,
которая
характеризует
распределение яркости в плоскости
изображения. Значение функции
,
которая
характеризует
распределение яркости в плоскости
изображения. Значение функции
![]() представляет уровень яркости по шкале
серого. Предполагается, без потери
общности, что
представляет уровень яркости по шкале
серого. Предполагается, без потери
общности, что
![]() ,
,
![]() и монохромное изображение считается
непрерывным.
и монохромное изображение считается
непрерывным.
В случае необходимости цветное изображение может быть представлено в виде трех монохромных изображений: красного, зеленого и синего (R,G,B) цвета. При этом каждый канал - R, G или B имеет отдельный параметр, указывающий на величину соответствующей компоненты в общем цветном изображении.
Для определенности в дальнейшем будем рассматривать монохромное изображение. Модель формирования изображения имеет вид:
![]() ,
,
где
![]() – оператор преобразования, формирующий
выходное изображение объекта
– оператор преобразования, формирующий
выходное изображение объекта
![]() в плоскости изображения по входному
изображению
в плоскости изображения по входному
изображению
![]() в плоскости объекта.
в плоскости объекта.
Формирование изображения в достаточно общем случае можно представить следующим образом:
 ,
(1)
,
(1)
где
весовая функция
![]() определяет зависимость между
распределениями энергии, излучаемой в
окрестности некоторой точки объекта
определяет зависимость между
распределениями энергии, излучаемой в
окрестности некоторой точки объекта
![]() ,
и точки
,
и точки
![]() ее изображения.
ее изображения.
В том случае, когда функция инвариантна в плоскости объекта уравнение (1) приобретает вид:

Равенство (1.2) описывает двумерную линейную систему формирования изображения (СФИ), инвариантную к сдвигу.
Процесс
формирования цифрового изображения
при воздействии аддитивных искажений
(шума)
![]() представляется в виде:
представляется в виде:
![]()
Из формулы (1.3) следует, что качество изображения зависит от весовой функции СФИ и от шума. В реальных условиях на качество изображения влияют факторы внешней среды (условии распространения сигналов), а также недостатки алгоритмов обработки и несовершенство аппаратуры, формирующей изображение. Идеальное изображение можно получить только при весовой функции, имеющей форму единичного импульса, и при отсутствии шума.
Использование
цифровых телекамер обеспечивает решение
задач пространственной и яркостной
дискретизации непрерывного изображения
![]() ,
т.е. замену координат его элементов
дискретными значениями и квантование
яркости этих элементов на определенное
число уровней. В память компьютера РК
информация об изображении вводится в
виде множества матриц, значения элементов
которых определены на целочисленной
прямоугольной решетке, покрывающей
область поля зрения
,
т.е. замену координат его элементов
дискретными значениями и квантование
яркости этих элементов на определенное
число уровней. В память компьютера РК
информация об изображении вводится в
виде множества матриц, значения элементов
которых определены на целочисленной
прямоугольной решетке, покрывающей
область поля зрения
![]() .
.
С
формальной точки зрения, входной
информацией СФИ РК является упорядоченное
множество чисел, являющихся элементами
последовательности матриц
размером
![]() ,
где
,
где
![]() и
и
![]() — соответственно число строк и столбцов
дискретного поля зрения
.
— соответственно число строк и столбцов
дискретного поля зрения
.
Область
будем рассматривать как растр, матрицу
— как функцию на растре: значение
![]() — как яркость в точке
— как яркость в точке
![]() ,
,
![]() ,
,
![]() .
Функцию
будем называть цифровым изображением
на растре
.
Таким образом, под термином “изображение”
подразумевается множество двумерных,
дискретных по времени и квантованных
по уровню сигналов.
.
Функцию
будем называть цифровым изображением
на растре
.
Таким образом, под термином “изображение”
подразумевается множество двумерных,
дискретных по времени и квантованных
по уровню сигналов.
Следует
отметить, что функции
и
![]() могут быть определены не во всей области
растра
,
а только в некоторой ее части
могут быть определены не во всей области
растра
,
а только в некоторой ее части
![]() ,
однако удобно их доопределить нулевыми
значениями в точках
,
однако удобно их доопределить нулевыми
значениями в точках
![]() .
.
Таким образом, эталонное и реальное изображение объекта будут представляться финитными функциями, т.е. функциями, обращающимися в нуль за пределами некоторого компактного множества.
Рассмотрим проблему моделирования процесса выделения объектов на окружающем фоне. Для представления входного изображения в виде (1) достаточно построить отображение:
![]() ,
,
обладающее следующими свойствами:
![]() ,
если
,
если
![]() ,
,
![]() ;
;
![]() ,
если
,
если
![]() .
.
Отображение
можно назвать правилом разметки точек
растра
:
каждая точка
получает смысловую метку с номером
![]() .
При этом точки с одной меткой представляют
собой область отдельного объекта или
область фона.
.
При этом точки с одной меткой представляют
собой область отдельного объекта или
область фона.
Моделирование
отображения
![]() можно
осуществить только на основе эвристических
соображений. Понятия «объект» и «фон»
в терминах свойств матрицы
размером
можно
осуществить только на основе эвристических
соображений. Понятия «объект» и «фон»
в терминах свойств матрицы
размером
![]() формализовать
нельзя. Значение эвристических
предположений уменьшается, если имеется
априорная информация о распределении
яркостей в области объекта и фона, а
также динамических свойствах контролируемых
объектов. В этом случае понятия «объект»
и «фон» поддаются частичной формализации.
формализовать
нельзя. Значение эвристических
предположений уменьшается, если имеется
априорная информация о распределении
яркостей в области объекта и фона, а
также динамических свойствах контролируемых
объектов. В этом случае понятия «объект»
и «фон» поддаются частичной формализации.
Из априорной информации об объектах в большинстве случаев имеются сведения об их связности. Объект, как правило, не может состоять из нескольких разрозненных частей. В противном случае производят его декомпозицию на несколько более простых элементов (объектов).
Сегментацию целесообразно провести в два этапа. Эти этапы показаны на Рисунке 2.

Рисунок 2. Этапы сегментации изображения
Грубой сегментацией является построение характеристической функции объединения областей только объектов:
![]() ,
если
,
если
![]() ;
;
![]() ,
если
,
если
![]() .
.
Построение
такой функции позволяет выделить фон.
После чего необходимо осуществить
«раскраску» - разметку бинарного
изображения
![]() ,
включающего совокупность изображений
нескольких объектов.
,
включающего совокупность изображений
нескольких объектов.
В
отличие от грубой сегментации раскраска
осуществляется без наличия эвристики.
Это связано с точной формализацией
понятия «объекта» для бинарного
изображения. Областью объекта является
множество точек растра, состоящее из
точек
![]() ,
для которых
,
оно связно и не содержится внутри
никакого большего связного множества,
состоящего из точек
,
для которых
.
Следует подчеркнуть, что приведенная
формализация имеет место только для
непересекающихся областей объектов. В
случае их пересечения строгая формализация
невозможна.
,
для которых
,
оно связно и не содержится внутри
никакого большего связного множества,
состоящего из точек
,
для которых
.
Следует подчеркнуть, что приведенная
формализация имеет место только для
непересекающихся областей объектов. В
случае их пересечения строгая формализация
невозможна.
Конечной
целью моделирования сегментации
изображений является разбиение поля
зрения
на
области объектов
![]() и
область фона
и
область фона
![]() .
.
Пороговое ограничение по яркости — один из распространенных методов сегментации. Это обусловлено тем, что изображения объектов манипулирования часто имеют достаточно однородную яркость и резко выделяются из фона. Метод применим в ИТС, так как типичная картина обстановки, соответствует этим критериям.
Наиболее
просто пороговая обработка осуществляется
в случае, когда заранее известно, что
изображение состоит из одного объекта![]() и фона, причем яркость точек объекта
находится в пределах
и фона, причем яркость точек объекта
находится в пределах
![]() ,
а яркость точек фона либо меньше
,
а яркость точек фона либо меньше
![]() ,
либо больше
,
либо больше
![]() .
В этом случае каждой точке
.
В этом случае каждой точке
![]() сопоставляется метка 1, если
сопоставляется метка 1, если
![]() ,
и метка 0 в противном случае. Произведенная
таким образом грубая сегментация
является окончательной вследствие
условия
,
и метка 0 в противном случае. Произведенная
таким образом грубая сегментация
является окончательной вследствие
условия
![]() .
.
Иногда
известно, что яркости объектов различны
и, более того, известны пороги: яркость
![]() объекта находится в пределах
объекта находится в пределах
![]() .
В этом случае можно сформировать
следующее правило разметки точек:
.
В этом случае можно сформировать
следующее правило разметки точек:

Однако такая разметка будет правильной только при выполнении двух условий:
![]()
в
точке
![]() выполнено
выполнено
![]()
Другими словами, интервалы яркости объектов не должны пересекаться, яркость фона должна меняться вне яркости объектов.
Частичная
или многозначная разметка может
одновременно являться грубой разметкой
точек, в том числе — отделением фона.
Последнее будет выполнено в том случае,
когда
![]() т. е. когда яркость фона отделена от
яркости объектов.
т. е. когда яркость фона отделена от
яркости объектов.
В
ряде задач робототехники пороги яркости
объектов и фона неизвестны, поэтому
метод порогового ограничения следует
дополнить способом определения
порогов. Определение порогов обычно
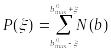
связано с анализом гистограмм. Гистограмма
— это отображение из множества
![]() значений яркости в множество
натуральных чисел, каждому
значений яркости в множество
натуральных чисел, каждому
![]() сопоставляется
число точек
сопоставляется
число точек
![]() ,
для которых
,
для которых
![]() .
.
Глобальный
максимум гистограммы соответствует
наиболее часто встречающемуся значению
яркости
![]() .
В большинстве задач доминирует фон, так
что значение
отвечает фону (в приведенных выше
обозначениях
.
В большинстве задач доминирует фон, так
что значение
отвечает фону (в приведенных выше
обозначениях
![]() .Следует
ожидать, что и близкие к
значения яркости также соответствуют
фону. Для определения порога, отделяющего
яркость объектов от яркости фона,
достаточно располагать дополнительной
информацией. Приведем наиболее
распространенные примеры такой
информации.
.Следует
ожидать, что и близкие к
значения яркости также соответствуют
фону. Для определения порога, отделяющего
яркость объектов от яркости фона,
достаточно располагать дополнительной
информацией. Приведем наиболее
распространенные примеры такой
информации.
Допустим, что известно некоторое соотношение (типа неравенства), связывающее яркость любой точки фона и объектов, например:
![]()
для
любых точек
![]() .
.
В
этом случае можно заключить, что для
любой точки
![]() любого объекта выполнено условие
любого объекта выполнено условие
![]()
Найдем
теперь глобальный максимум части
гистограммы в области
![]() .
Пусть он достигается в точке
.
Пусть он достигается в точке
![]() .
.
Следует
ожидать, что![]() ,
т. е.
— яркость, наиболее часто встречающаяся
в точках объектов. Из соотношения можно
заключить, что для любой точки области
фона выполнено условие
,
т. е.
— яркость, наиболее часто встречающаяся
в точках объектов. Из соотношения можно
заключить, что для любой точки области
фона выполнено условие
![]()
Соотношения
дают пороги яркости для точек объектов
и фона. Как следует из п. 1, они позволяют
построить частичную или многозначную
разметку. Предположим, что вышесказанное
имеет место при
![]() .
Пусть глобальный максимум гистограммы
достигается в точке
.
Пусть глобальный максимум гистограммы
достигается в точке
![]() .
Пусть в области
.
Пусть в области
![]() (т. е. в области
(т. е. в области
![]() )
глобальный максимум достигается в точке
)
глобальный максимум достигается в точке
![]() .
Поэтому можно сделать вывод, что яркость
точек объектов меньше 20, яркость точек
фона больше 25. Возникает вопрос о точках
промежуточной яркости, т. е. в интервале
.
Поэтому можно сделать вывод, что яркость
точек объектов меньше 20, яркость точек
фона больше 25. Возникает вопрос о точках
промежуточной яркости, т. е. в интервале
![]() .
Если такие точки имеются, а исходная
информация верна, то это возможно только
за счет помех. Тогда нужно выбрать порог
яркости, разделяющий объекты и фон,
равным, например, среднему между
значениями и
.
Если такие точки имеются, а исходная
информация верна, то это возможно только
за счет помех. Тогда нужно выбрать порог
яркости, разделяющий объекты и фон,
равным, например, среднему между
значениями и
![]() .
В рассмотренном примере
.
В рассмотренном примере
![]() .
Ситуация может быть и иной, когда это
неравенство не выполнено. В этом случае
можно осуществить грубую многозначную
разметку: точкам в яркостью ниже
.
Ситуация может быть и иной, когда это
неравенство не выполнено. В этом случае
можно осуществить грубую многозначную
разметку: точкам в яркостью ниже
![]() сопоставляется метка 1, точкам яркостью
выше
- метка 0, остальным точкам – две метки:
0 и 1. Перейти от такой разметки к
окончательной можно, используя локальные
методы сегментации, а при отсутствии
информации, необходимой для их реализации,
- используя эвристическое правило выбора
порога путем усреднения величин
и
.
сопоставляется метка 1, точкам яркостью
выше
- метка 0, остальным точкам – две метки:
0 и 1. Перейти от такой разметки к
окончательной можно, используя локальные
методы сегментации, а при отсутствии
информации, необходимой для их реализации,
- используя эвристическое правило выбора
порога путем усреднения величин
и
.
Аналогичные рассуждения имеют место и в случае, когда вместо неравенства (1) мы располагаем неравенством
![]()
где
![]() >1
- известный коэффициент. Кроме того,
вместо неравенств (2) и (3), выполнение
которых означает, что яркость выше
яркости объектов, можно рассмотреть
аналогичные неравенства:
>1
- известный коэффициент. Кроме того,
вместо неравенств (2) и (3), выполнение
которых означает, что яркость выше
яркости объектов, можно рассмотреть
аналогичные неравенства:
![]()
с
известным порогом
![]() и коэффициентом.
и коэффициентом.
Информация (4) может иметь место в случае, когда фон «темнее» объектов.
Рассмотрим теперь информацию о соотношении площадей области фона и области объектов, часто встречающуюся в задачах, связанных с СТЗ роботов. Пусть известно, что
![]()
Где
![]() - известный коэффициент;
- известный коэффициент;
![]() – число точек области
– число точек области![]() .
Введем зависимость
.
Введем зависимость
Где
![]() – гистограмма распределения яркости.
Пусть
– гистограмма распределения яркости.
Пусть
![]() – общее число точек растра. Априорная
информация (5) позволяет заключить, что
число точек
– общее число точек растра. Априорная
информация (5) позволяет заключить, что
число точек
![]() .
Поэтому можно сделать вывод, что яркость
фона заключена в пределах
.
Поэтому можно сделать вывод, что яркость
фона заключена в пределах![]() ,
где
,
где
![]() — решение уравнения
— решение уравнения
![]() .
Заметим, что
.
Заметим, что
![]() — возрастающая функция. Точное решение
уравнения обычно не представляется
возможным, поэтому в качестве
следует выбрать такое значение, чтобы
— возрастающая функция. Точное решение
уравнения обычно не представляется
возможным, поэтому в качестве
следует выбрать такое значение, чтобы![]() где
– шаг изменения
где
– шаг изменения
![]() .
.
Указанные
два типа априорной информации позволяют
решить задачу сегментации при
и осуществить грубую сегментацию
при
![]() .
В любом случае такого рода информация
позволяет осуществить частичную или
многозначную разметку, которая обычно
служит важной исходный информацией для
локальных методов типа наращивания
областей.
.
В любом случае такого рода информация
позволяет осуществить частичную или
многозначную разметку, которая обычно
служит важной исходный информацией для
локальных методов типа наращивания
областей.
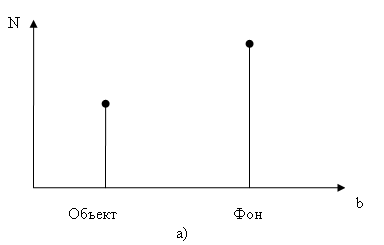
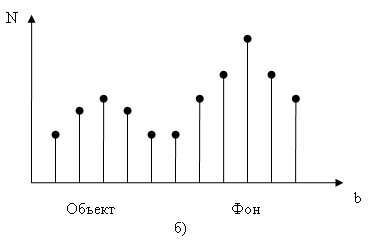
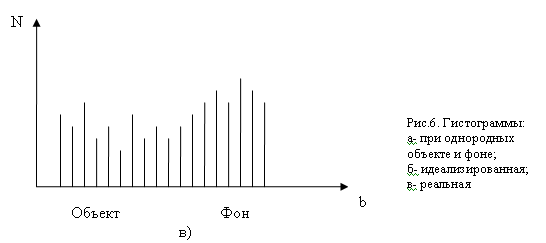
Рисунок
3. Гистограммы: а
– при
однородных объекте и фоне; б
–
идеализированная;
в –
реальная.
При отсутствии априорной информации указанных двух типов существует подход к определению порогов, связанный с нахождением не только глобального максимума гистограммы, но и других ее экстремумов. Допустим, что изображение состоит из фона и одного объекта. При постоянной яркости фона и объекта гистограмма имеет простейший вид (Рисунке 3 а).Такой вид гистограммы в реальной ситуации далек от действительности, более реальна гистограмма, представленная на Рисунке 3б.
В этом случае гистограмма носит бимодальный характер, так как имеются два ярко выраженных максимума – глобальный, соответствующий фону, и локальный, соответствующий объекту.
Для гистограммы, показанной на рисунке 4 б, естественно установить разделяющий объекты и фон порог яркости по ее минимуму. Однако такой подход затруднен в связи с тем, что рисунке 4 а, не отвечает реальному распределению яркостей. Реальная гистограмма имеет ступенчатый, и в связи с большим количеством ложных экстремумов поиск их производить сложно (исключение составляет глобальный максимум). Поэтому локальный максимум гистограммы, соответствующий наиболее часто встречающейся яркости точек объектов, следует находить по правилу
![]()
где
![]() -
пределы квантования;
-
пределы квантования;
![]() -
некоторая окрестность точки глобального
максимума. Для выбора окрестности
необходима дополнительная априорная
информация.
-
некоторая окрестность точки глобального
максимума. Для выбора окрестности
необходима дополнительная априорная
информация.
Например, при известном соотношении площадей объектов и фона применим указанный выше способ.
После
нахождения экстремумов
![]() необходимо найти располагаемую между
ними точку минимума гистограммы. Эту
гистограмму на отрезке
необходимо найти располагаемую между
ними точку минимума гистограммы. Эту
гистограмму на отрезке
![]() можно аппроксимировать аналитической
функцией, например параболой
можно аппроксимировать аналитической
функцией, например параболой
![]() .
.
Коэффициенты
![]() находятся методом наименьших квадратов.
Аппроксимация сглаживает гистограмму
на отрезке
,
в пределах которого она приобретает
качественно тот же вид.
находятся методом наименьших квадратов.
Аппроксимация сглаживает гистограмму
на отрезке
,
в пределах которого она приобретает
качественно тот же вид.
Все
сказанное переносится на случай
нескольких объектов
![]() ,
если их яркости мало отличаются друг
от друга по сравнению с минимальным
перепадом яркости объект-фон. Правда,
в этом случае пороговая обработка даст
грубую, а не окончательную сегментацию.
,
если их яркости мало отличаются друг
от друга по сравнению с минимальным
перепадом яркости объект-фон. Правда,
в этом случае пороговая обработка даст
грубую, а не окончательную сегментацию.
Одним из важнейших этапов обработки видеоинформации, в том числе в ИТС, является сегментация изображений. Решение этой задачи оказывает непосредственное влияние на качество распознавания объектов.
Достоинствами метода являются:
простота реализации;
хорошее качество сегментации при выполнении условий, накладываемых на фон и объекты.
Недостатки метода:
необходимость присутствия априорной информации хотя бы одного вида;
условия накладываемые на фон и объекты – однородная яркость объектов и резкое выделение их из фона.
Для мобильных комплексов ИТС, обладающих сравнительно невысокой производительностью, во многих случаях целесообразно использовать метод порогового ограничения. Этот метод прост в реализации и дает результаты высокого качества в случае выполнения условий достаточной однородности яркости объектов, и резком выделении их из фона, а также при наличии априорной информации указанных типов.
Таким образом, можно сделать вывод о том, что одну из важных проблем организации дорожного движения, а именно – проблему сбора достоверной информации о состоянии дорожного движения, можно и целесообразно с экономической точки зрения решать путем применения видеоустройств, которые затем позволяют произвести сегментацию изображений описанным методом.