

3. Теоретические сведения
Модель – это изображение оригинала на основе принятых гипотез и аналогий, а моделирование – представление объекта моделью для получения информации об этом объекте путём проведения экспериментов с его моделью [7]. Основное требование, которому должна удовлетворять модель, адекватность объекту. Адекватность модели зависит от цели моделирования и принятых критериев. Модель адекватна объекту, если результаты моделирования подтверждаются на практике и могут служить основой для прогнозирования процессов, протекающих в исследуемых объектах.
Компьютерное моделирование включает три этапа.
1. Построение концептуальной модели системы и её формализация. Назначение этого этапа – переход от содержательного описания системы к её математической модели.
2. Алгоритмизация модели системы и её машинная реализация. Назначение этого этапа – получение машинной модели.
3. Получение и интерпретация результатов моделирования системы. На этом этапе проводят рабочие расчёты на ЭВМ, получают и интерпретируют результаты моделирования системы, т.е. осуществляют переход от информации, полученной в результате машинного эксперимента с моделью, к информации применительно к исследуемой системе.
Лабораторный практикум направлен на моделирование систем автоматического управления (САУ), относящихся к динамическим системам и представляющих собой комплекс взаимосвязанных элементов, участвующих в процессе управления, и образующих совокупность объекта управления, регулятора и датчика рассогласования [4]. Типовая автоматическая система может быть представлена в следующем виде (рис.11).
Задающее и возмущающее воздействия являются входными, а управляемая величина и ошибка – выходными величинами. Задача системы воспроизводить задающее воздействие и компенсировать возмущающее.

Рис. 11. Функциональная схема системы автоматического управления:
Элементы системы: ОУ – объект управления, R – регулятор, ЗУ – задающее устройство, ИПУ – измерительно-преобразовательное устройство (датчик), СУ – сравнивающее устройство. Последние три устройства образуют датчик рассогласования. Координаты (переменные) системы: g(t) – задающее воздействие, y(t) – управляемая (регулируемая) величина, f(t) – возмущающее воздействие, x(t) – рассогласование (ошибка), u(t) – управляющее воздействие
Описание динамика САУ или, проще говоря, её поведения во времени, составляет основу любой имитационной модели. Имитационная модель – это формальное описание логики функционирования исследуемой системы и взаимодействия отдельных её элементов во времени и обеспечивающее проведение экспериментов. Программная среда VisSim в полной мере удовлетворяет требованиям имитационного моделирования.
Моделирование динамических систем в пакетах визуального моделирования осуществляется по следующей схеме:
– построение модели из элементарных блоков и её сохранение на диске;
– задание метода и параметров моделирования;
– моделирование;
– анализ результатов моделирования.
4. Лабораторное задание
1. Создайте VisSim-диаграмму, приведённую на рис. 2, с указанием даты создания и Ф.И.О. автора.
2. Выполните визуальное моделирование в среде VisSim системы управляющей лабораторной СУЛ - 3, структурная схема которой представлена на рис. 12, где WОУ(s) – передаточная функция объекта управления; WR(s) – передаточная функция регулятора; Wg(s) – передаточная функция датчика.
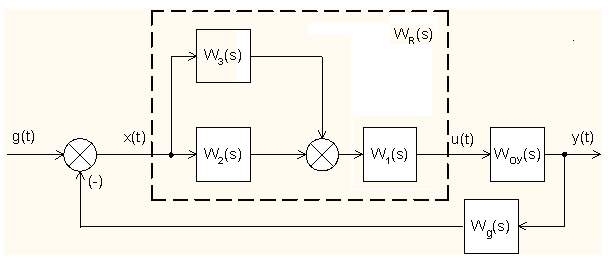
Рис. 12. Структурная схема САУ
Передаточная функция объекта управления
![]() ,
,
где kоу = К0 = 10 – коэффициент передачи объекта управления;
Т01 = 1 c, Т02 – постоянные времени объекта управления.
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
Т02, c |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |