

F anuc m-16iB/10l
M-16iB - это модульный, шестикоординатный робот, приводимый в действие сервоприводами, разработанный под различные производственные процессы. Серия M-16iB основывается на простой и надежной конструкции, предоставляет усовершенствованное управление движением, обеспечивает устойчивую производительность и высокую продуктивность. Контроллер R-J3iB и программное обеспечение Handling Tool позволяют с легкостью запрограммировать робот на точное прохождение требуемой траектории. Серия M-16iB представляет собой последнее поколение роботов для манипулирования деталями и материалами. Роботы, входящие в эту серию, обладают компактными размерами в сочетанни с большим радиусом действия и скоростью. Небольшие размеры упрощают установку, максимально увеличивают область действия в ограниченных пространствах и дают возможность установки с высокой плотностью размещения роботов и дополнительного оборудования.
Количество осей : 6
Максимальная грузподъемность : 10
Радиус действия : 1885
Точность позиционирования : 0.1
Масса : 220
Размах J1 : 340
Размах J2 : 250
Размах J3 : 455
Размах J4 : 400
Размах J5 : 280
Размах J6 : 900
Угловая скорость J1 : 165
Угловая скорость J2 : 165
Угловая скорость J3 : 175
Угловая скорость J4 : 350
Угловая скорость J5 : 340
Угловая скорость J6 : 520
Момент силы J4 : 22
Момент силы J5 : 22
Момент силы J6 : 9.8
Момент инерции J4 : 0.63
Момент инерции J5 : 0.63
Момент инерции J6 : 0.15
Область применения: электродуговая сварка, arcwelding : 1
Область применения: покраска, painting : 1
Область применения: механическая обработка, processing : 1
Область применения: перемещение деталей, handling : 1
Область применения: сборка, assembly : 1
Модель робота : M-16iB/10L
5. Транспортно-накопительная система гап
5.1. Классификация тсн по способам транспортирования
ТНС могут быть разных уровней:
межцеховыми;
цеховыми;
локальными.
Транспортные связи охватывают грузопотоки межцеховые, межучастковые, межоперационные и все элементы перемещений, включая ориентацию, установку заготовки, съем изделия, кассетирование и т.д.
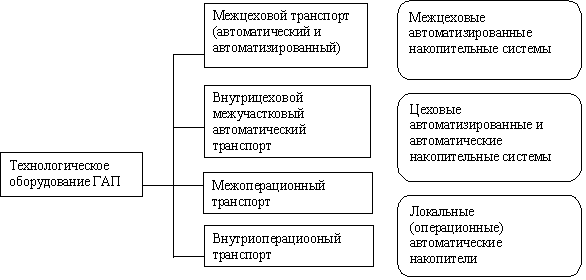
Рис 2. Разновидности ТНС.
Грузопотоки, их связи и мощность определяются с целью выбора транспортных средств.
Грузы следует классифицировать по транспортно-технологическим характеристикам:
Сырье:
1) Полистирол вспенивающийся суспензионно для производства плит пенополистирольных согласно гост 15588-86:
- способ загрузки – без тары
- вид материала – гранулы
Продукт:
3) производства плит пенополистирольные
- способ загрузки – без тары
- форма – плита
По организационно- техническим требованиям ТНС делятся согласно рис. 3.
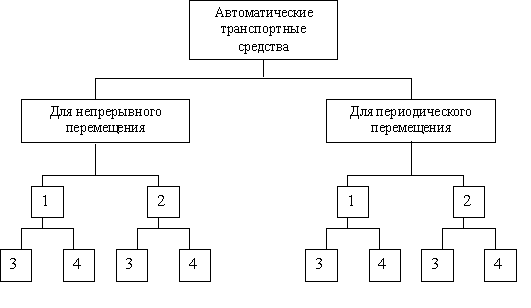
Рис 3. Деление ТНС по организационно-техническим требованиям:
1 – ветвящиеся потоки, 4 – прямоточные
2 – неветвящиеся, 3 – возвратные
5.2. Технические средства тнс
Технические средства ТНС делятся на две группы: основное оборудование и вспомогательное.
Основное ооборудование: автоматические стеллажные и мостовые краны-штабелеры, транспортные и прегрузочные работы, конвейеры, накопители, перегрузочные и ориентирующие устройства, технические средства автоматического управления и транспортно-складская тара.
Вспомогательные средства: толкатели, сбрасыватели, адресователи, ориентаторы, подъемники, питатели и др.