

5.2. Расчет сил инерции и моментов инерции









































5.3. Анализ силового нагружения звеньев механизма, построение групп Ассура и начального звена
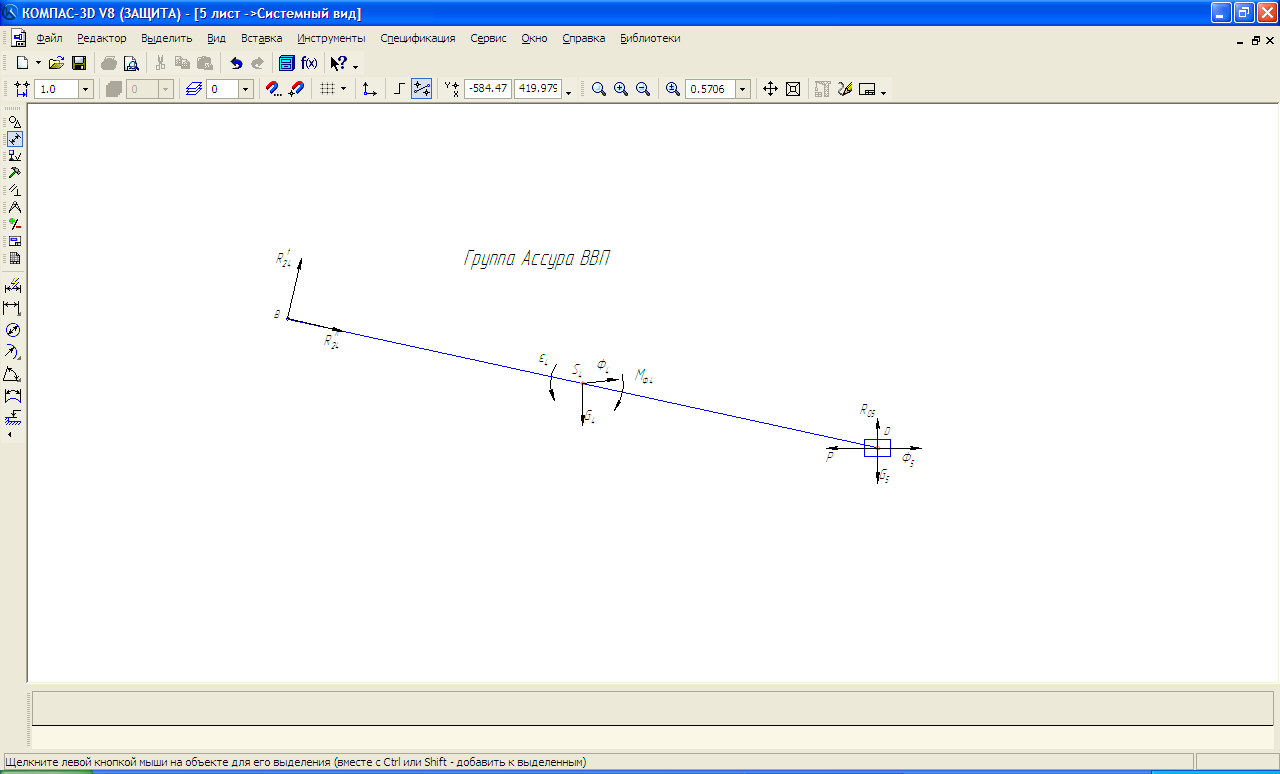
Группа Ассура ВВП:




Составляем уравнение суммы моментов относительно т. D:


Строим план сил для группы ВВП. Масштабный коэффициент:



Группа Ассура ВВВ:



Составляем уравнение суммы моментов относительно т. С:


Составляем уравнение суммы моментов относительно т. А:




Строим план сил для группы ВВВ. Масштабный коэффициент:




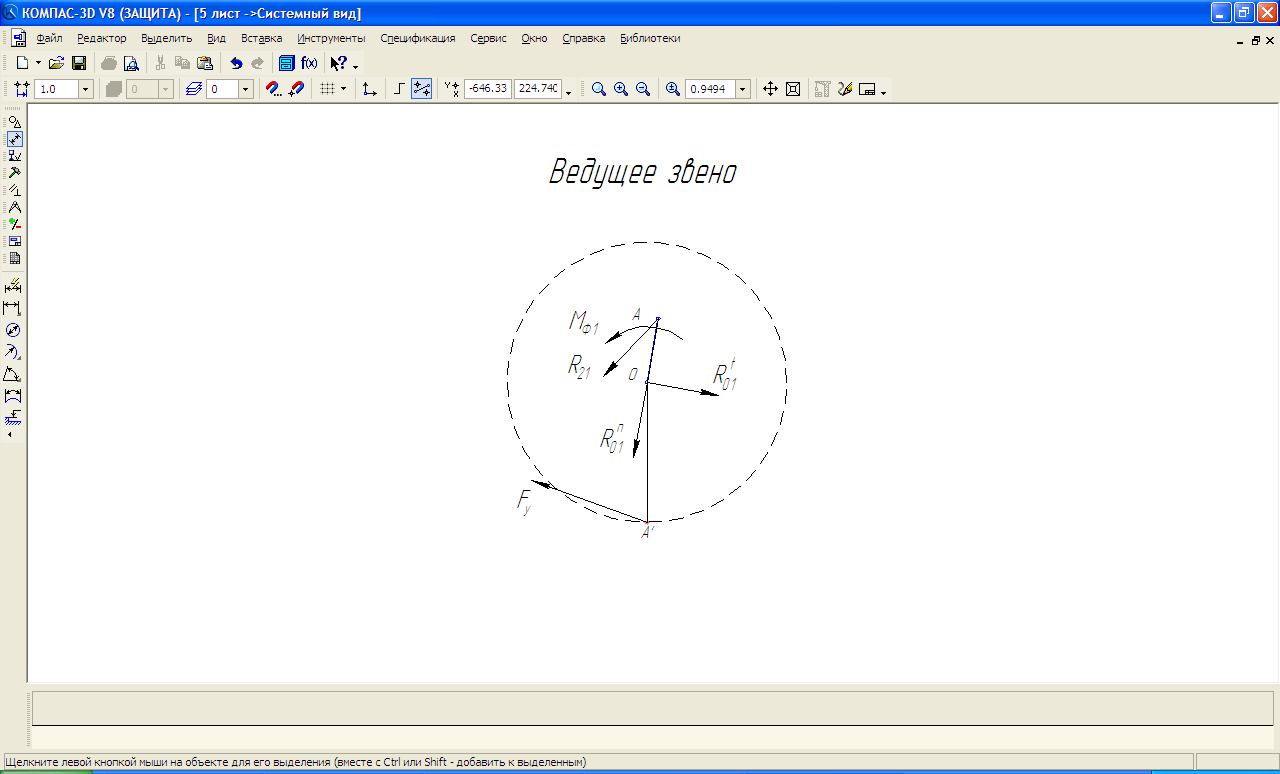
Ведущее звено:



Составляем уравнение суммы моментов относительно т. О:


Строим план сил для ведущего звена:



Проверка с помощью рычага Жуковского
Вспомогательным рычагом Жуковского называется повернутый на 90° в любую сторону план скоростей механизма, принимаемый за абсолютно твердое тело, имеющее возможность вращаться вокруг неподвижной точки – полюса плана скоростей. Теорема Жуковского гласит, что если система сил, приложенных к механизму, находится в равновесии, то вспомогательный рычаг под действием тех же сил, приложенных на плане к концам скоростей тех же точек механизма, к которым они действительно приложены, также находится в равновесии.
Запишем уравнение для повернутого на 90° плана скоростей в 11 положении механизма:




Расхождение составляет:

5.4. Определение мгновенного кпд рычажного механизма












Радиусы цапф вращательных кинематических пар примем равными:







Мощность, затрачиваемая на трение во вращательной кинематической паре А:














Общая мощность, необходимая для преодоления сил трения во всех кинематических парах:

Приведенный к кривошипу 1 момент сил трения:


Мгновенный КПД рычажного механизма:


Общий КПД механизма:


Требуемая мощность двигателя:


По
данной частоте вращения двигателя
 и мощности определяем тип двигателя:
и мощности определяем тип двигателя:
Тип: 4АС80В4J3 – асинхронный двигатель;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;

Вывод: двигатель при работе не должен выходить в генераторный режим, т.к. при этом он будет оказывать тормозящее воздействие на механизм, что сопровождается изменением направления сил в кинематических парах. По естественной механической характеристике видно, что значения максимальной и минимальной скорости механизма заставят работать двигатель только в генераторном режиме, такая работа двигателя недопустима. Для того, чтобы обеспечить работу двигателя необходимо изменить передаточное отношение привода, при этом должно соблюдаться соотношение δ≤δн.доп..