

6.1. Принцип максимума в задаче о быстродействии.
В
этой задаче время T
не фиксировано и
![]() (X,U)
= 1 (в данном
случае),
т.е.
(X,U)
= 1 (в данном
случае),
т.е.
J
=![]() =T
=T
Функция Гамильтона:
![]() =
=![]() +
+![]()
![]()
Т.к.
функции
![]() (X,U)
,
=
(X,U)
,
=![]() не зависят от
не зависят от![]() ,
получим:
,
получим:
![]() =
=
![]() =
0
=
0
![]() =
const
=
const
*см. гамильтонову систему
Максимум
функции
![]() реализуется одновременно с максимумом
функции H=
реализуется одновременно с максимумом
функции H=![]()
![]()
Из
требования
![]()
0 (принцип
максимума) следует,
что максимум H
0
0 (принцип
максимума) следует,
что максимум H
0
*в
момент времени T, т.к.
![]() должен
быть равен 0 в T.
должен
быть равен 0 в T.
Таким образом, для оптимальности по быстродействию необходимо:
Существование ненулевой непрерывной вектор - функции:
(t)
=![]() ,
составляющие которой удовлетворяют
системе:
,
составляющие которой удовлетворяют
системе:
![]() =
=![]() ;
;![]() =
=![]()
Чтобы функция Гамильтона H = ( (t), F (X,U)) достигала при каждом значении
0 < t < T максимума по U.
Чтобы при t = T max H = ( (t), F (X,U)) 0 .
Замечание:
Оказывается, что если выполняются условия 1 и 2, то функция max H(t) постоянна,
так что условие 3 справедливо в любой момент времени 0 < t < T.
Пример:
Рассмотрим задачу о предельном быстродействии при переходе системы
 из
начального состояния
из
начального состояния
 в заданное состояние
в заданное состояние
*т.е. осуществляется переход в нулевое состояние.
Единственное управляющее воздействие u ограничено по модулю
![]()
![]() (*)
(*)
Составляем
функцию Гамильтона: H =
![]() +
+![]()
Составляющие вектора должны удовлетворять уравнениям:
![]() =
0;
=
0;
![]() =
=![]()
Интегрирование дает:
![]() =
=
![]() ,
,![]() =
=![]()
![]()
и функция Гамильтона:
H
=
![]() +
+![]()
Максимум
функции Гамильтона H при ограничении
(*) достигается при управляющем воздействии:
u(t) =
![]() sign(
sign(![]()
![]() )
=
)
=![]() sign
sign
![]() (**),
(**),
а
величина
![]() =
=![]() +
+![]() (
(![]()
![]() )sign(
)sign(![]()
![]() )
)
Из выражения (**) следует:
При оптимальном процессе управляющее воздействие в любой момент времени равно одному из двух своих предельных значений (+
 ,
, ),
т.е. значениям на границе области
возможных управлений.
),
т.е. значениям на границе области
возможных управлений.
Этот
вывод , вытекающий из принципа максимума,
не может быть получен методами
классического вариационного исчисления.
Обычно считают
![]() =1
=1
Оптимальный процесс состоит не более чем из двух интервалов, т.к. функция
 =
=
 не
более одного раза переходит через 0,
меняя при этом свой знак
не
более одного раза переходит через 0,
меняя при этом свой знак
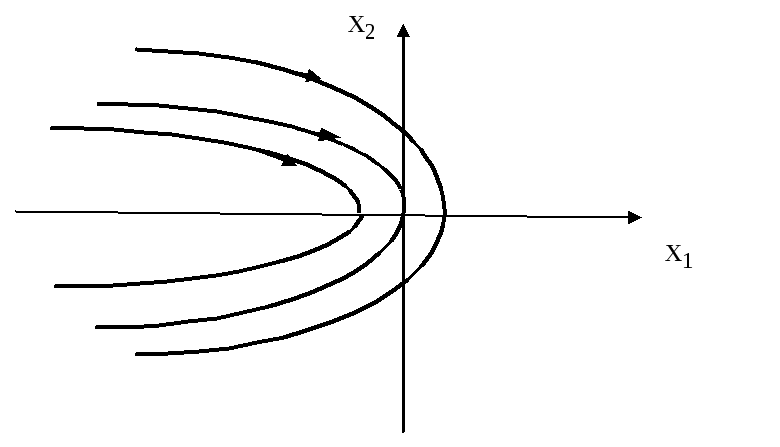
Решаем исходную систему:
1). Пусть u = 1,
тогда
![]() (t)
= t +
(t)
= t +![]()
![]() (t)
=
(t)
=
![]() +
+![]() +
+![]() =
=![]()
![]() +
+ =
=![]()
![]() +
+![]()
Семейство фазовых траекторий имеет вид:
Фазовые
точки движутся снизу вверх, т.к.
![]() =u
1,
=u
1,
![]() >
0
>
0
* ускорение >0 скорость растет
2). u = -1
![]() (t)
= -t +
(t)
= -t +
![]()
![]() (t)
= -
(t)
= -![]() +
+![]() +
+![]() =
-
=
-![]()
![]() +
+ =
-
=
-![]()
![]() +
+![]()
Фазовые точки движутся сверху вниз
* ускорение < 0 скорость падает
Общее семейство фазовых траекторий:
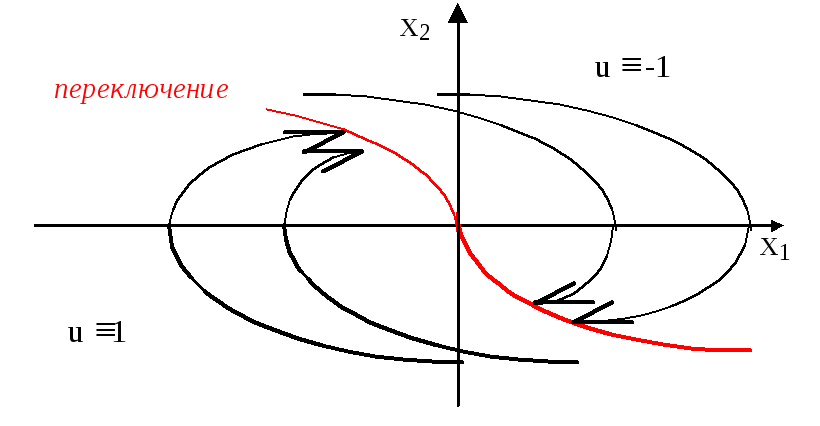
Таким образом. максимум одно переключение - траектория входит в ноль.
* мы должны перевести систему в ноль - см. начало
![]() -
расстояние,
-
расстояние,
![]() -
скорость
-
скорость
u = 1 - разгон (ускорение - производная скорости по времени > 0 )
u = -1 - торможение (ускорение < 0 ).
Согласно принципу максимума только изображенные траектории могут быть оптимальными, причем из каждой точки фазовой плоскости исходит только одна траектория, ведущая в начало координат , которая может быть оптимальной (т.е. задание начальной точки однозначно определяет соответствующую траекторию).
Можно доказать, что эти траектории оптимальны (т.е. обосновать достаточность).