3.5.2. Построение оптимального плана. Метод потенциалов.
Лемма:
Если при подстановке компонент оптимального плана в систему ограничений исходной задачи i-е ограничение обращается в неравенство, то i-я компонента оптимального плана двойственной задачи равна 0.
Если i-я компонента оптимального плана двойственной задачи положительна, то i-е ограничение исходной задачи удовлетворяется ее оптимальным решением, как строгое равенство.
Доказательство:
базируется на дифференциальных условиях существования седловой точки задачи линейного программирования (см. п.3, 2.3.).
![]()
Для ЗЛП функция Лагранжа:
(x, ) = (c, x) + (, b Ax)
Тогда дифференциальные условия для этой функции:
![]() =
0, i
=
=
0, i
=![]() :
:
![]() =
0, j
=
=
0, j
=![]() :
:
Без доказательства.
Теорема:
Если
план
![]() ТЗ является
оптимальным,
то ему соответствует система из m+n
чисел
ТЗ является
оптимальным,
то ему соответствует система из m+n
чисел
![]() и
и
![]() ,
удовлетворяющая условиям:
,
удовлетворяющая условиям:
![]() +
+![]() =
=
![]() для
для
![]() >
0
>
0
![]() +
+![]()
![]() для
для
![]() =
0
=
0
Числа
![]() и
и
![]() называются потенциалами
соответственно поставщиков и потребителей.
называются потенциалами
соответственно поставщиков и потребителей.
Доказательство:
Вместо решения исходной транспортной задачи (ЗЛП) решаем двойственную ЗЛП.
ЗЛП:
![]() ?
?
Ax = E , x 0
E
=![]()
Двойственная задача:
![]() ?
?
![]() ,
0
,
0
Т.к.
в строке AT
два ненулевых (единичных)
элемента (обозначим ui=i,
vj=i,
то получаем
![]() +
+![]()
![]()
Пусть
![]() =
=![]()
![]() =
=![]()
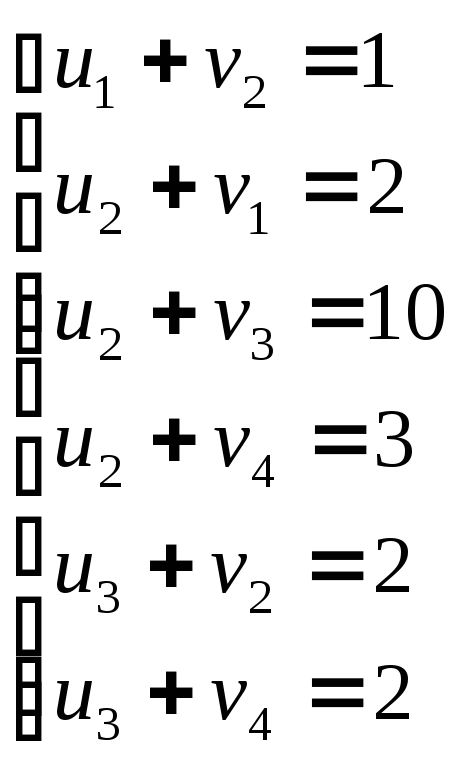
С учетом леммы двойственную задачу надо записать в виде:
 ,
где
,
где
![]() +
+![]() =
=
![]() для
для
![]() >
0
>
0
![]() +
+![]()
![]() для
для
![]() =
0
=
0
Теорема доказана.
Таким образом, для того, чтобы план был оптимальным необходимо выполнение следующих условий:
а)
Для любой занятой клетки
![]() +
+![]() =
=
![]()
б)
Для любой незанятой
![]() +
+![]()
![]()
Если
хотя бы одна незанятая клетка не
удовлетворяет условию
![]() +
+![]()
![]() ,
то опорный план не является оптимальным,
и его можно улучшить, введя в базис
вектор, соответствующий клетке, для
которой нарушается условие оптимальности
(в клетку
надо переместить некоторое количество
единиц груза).
,
то опорный план не является оптимальным,
и его можно улучшить, введя в базис
вектор, соответствующий клетке, для
которой нарушается условие оптимальности
(в клетку
надо переместить некоторое количество
единиц груза).
Алгоритм метода потенциалов:
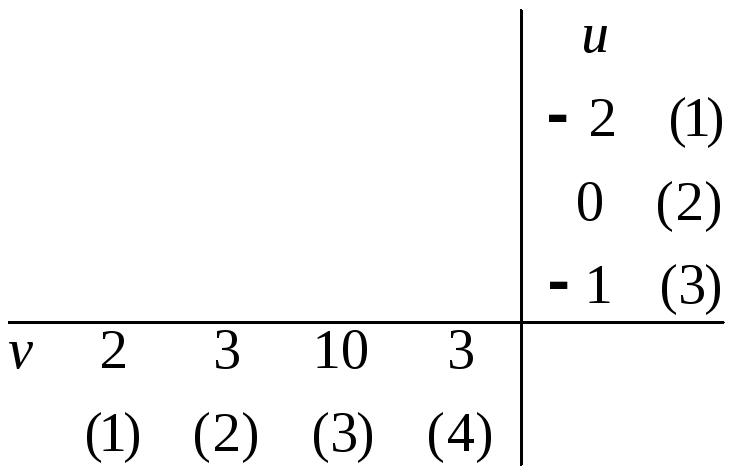
Построение системы потенциалов:
Используем
условие
![]() +
+![]() =
=
![]() для занятых клеток. Уравнений m+n-1,
для занятых клеток. Уравнений m+n-1,
неизвестных
m
+ n.
Одну компоненту обнулим (любое
![]() или
или
![]() ).
).
Для данного примера:
 пусть
пусть
![]() =0,
=0,
тогда:
 (для
таблицы данного примера)
(для
таблицы данного примера)
Проверка выполнения условия оптимальности для незанятых клеток.
Вычисляем характеристические разности :
![]() =
=
![]() +
+![]() -
-![]() (см. таблицу
стоимостей примера)
(см. таблицу
стоимостей примера)
Если
в любой незанятой клетке
![]()
0, то конец.
0, то конец.
Выбор клетки, в которую необходимо послать перевозку:
Среди
![]() >
0 надо выбрать максимальную(для
примера +6)
.
>
0 надо выбрать максимальную(для
примера +6)
.
Построение цикла и определение величины перераспределения груза:
Отмечаем плюсом найденную клетку. Стало m+n занятых клеток, т.е. существует цикл. Идем по циклу и расставляем плюсы и минусы, чередуя их . (см. пример)
Затем
находим
![]() (по
минусам , расставленным ранее).
Значение
(по
минусам , расставленным ранее).
Значение
![]() записываем
в незанятую клетку. Идем по циклу ,
записываем
в незанятую клетку. Идем по циклу ,
где
плюс - добавляем
![]() ,
,
где
минус - вычитаем значение
![]() из
из![]() .
.
Пример:
|
|
5 |
|
- |
|
3 |
|
1 |
3 |
|
|
3 |
1 |
|
вид таблицы примера
f = 39 ( значение функции f уменьшилось )
Проверка полученного опорного плана на оптимальность и переход в случае необходимости к пункту 2.
Мы завершили раздел математического программирования: