

3. Линейное программирование
3.1. Основные понятия
ЗЛП: minf(x),xX
X={xRn :gj(x)0,j= 1...m},f,gj - линейны для любогоj.
Таким образом ЗЛП- частный случай ЗНП.
Определение:
Функция называется линейной, если справедливо:
f(1x1+ 2x2) = 1f(x1) + 2f(x2), где iR, xiX.
В n-мерном пространстве линейная функция может быть определена так:
f(x) = (c,x)
f(x) = c1x1+ ....+ cnxn
Ограничения
Расширим класс задач
 ,
,
то есть передвинуть область в n-мерном пространстве.
Определение:
Если при задании допустимого множества Xиспользуются только неравенства, то это ЗЛП в стандартной форме.
Определение:
Если при задании Xиспользуются только равенства, то это задача линейного программирования в канонической форме.
Возможны смешанные задачи.
ЗЛП в канонической форме эквивалентна некоторой задаче в стандартной форме и наоборот.
Пусть есть только неравенства. Как от них избавиться?
Надо расширить пространство: в каждое из неравенств добавляется еще одна координата (переменная) xn+i 0
![]()
![]() +
+
![]()
![]() +...+
+...+![]()
![]() +
+![]() =
=![]()
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
 +
+
 +...+
+...+
 +
+ =
=
Ограничения типа равенств можно представить в виде двух ограничений типа неравенств. Пусть (, x) = 0 , тогда (, x)0 и (, x)0
Матричная форма записи ЗЛП.
X
= {Ax
= b , x
0 , x
![]() }
; A - матрица размерности mn
; x - вектор размерности n ; b - вектор
размерности m ;
}
; A - матрица размерности mn
; x - вектор размерности n ; b - вектор
размерности m ;
f(x) = (c,x) - линейная функция;
![]() f(x)
- ЗЛП
f(x)
- ЗЛП
Упражнение: Доказать, что допустимое множество Х ЗЛП – выпукло.
Определение: Точка x выпуклого множества называется крайней (угловой), если из
![]() +
(1 - )
+
(1 - )
![]() =
x следует
=
x следует![]() =
=![]() =
x , т.е. крайнюю точку нельзя выразить с
помощью линейной комбинации других
точек выпуклого множества.
=
x , т.е. крайнюю точку нельзя выразить с
помощью линейной комбинации других
точек выпуклого множества.
Теорема ( о представлении ) :
Всякая точка допустимого ограниченного множества ЗЛП допускает представление в виде выпуклой комбинации его крайних точек .
(без доказательства)
Теорема ( о существовании оптимальной точки ) :
Если целевая функция на допустимом множестве ЗЛП ограничена снизу, то оптимальная точка существует.
Доказательство: (без доказательства).
Таким образом, существует альтернатива :
либо минимум целевой функции на X есть - ,
либо существует оптимальная точка
 :
(c ,
:
(c , )
=
)
= (c, x) , если X не пусто.
(c, x) , если X не пусто.
3.2. Геометрическая интерпретация злп.
Пусть
X = {x
![]() ,
Ax
b , x
0} , f(x) = (c,x) - целевая функция
,
Ax
b , x
0} , f(x) = (c,x) - целевая функция
A=![]() - матрица, где
- матрица, где![]() - строка длины n ;
- строка длины n ;
b=![]() - вектор размерности m.
- вектор размерности m.
Тогда
одно условие принимает вид : (![]() ,
x)
,
x)
![]() ,
i =
,
i =![]()
Множество
точек, для которых справедливо это
неравенство - полупространство с
граничной гиперплоскостью (![]() ,
x) =
,
x) =![]() .
.
Определение:
Гиперплоскость
в пространстве
![]() - это пространство размерности
- это пространство размерности
![]() .
Таким образом, допустимое множество X
является пересечением конечного числа
полупространств.
.
Таким образом, допустимое множество X
является пересечением конечного числа
полупространств.
Рассмотрим двумерный случай (n = 2) :
Гиперплоскость - прямая; полупространство - полуплоскость.
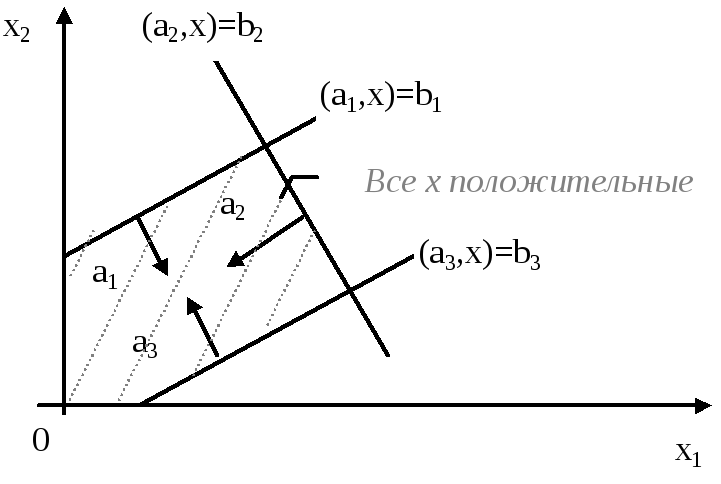
Рис.1а.
* здесь ограниченное допустимое множество
x 0, т.е. допустимое множество находится в 1 квадранте.
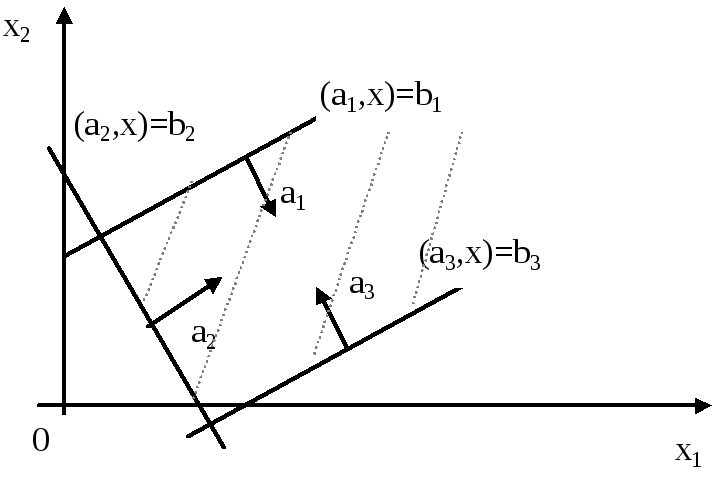
Рис.2а.
* здесь неограниченное допустимое множество
Какая точка может быть оптимальной для ЗЛП?
Наряду с допустимыми множествами введем в рассмотрение целевую функцию.
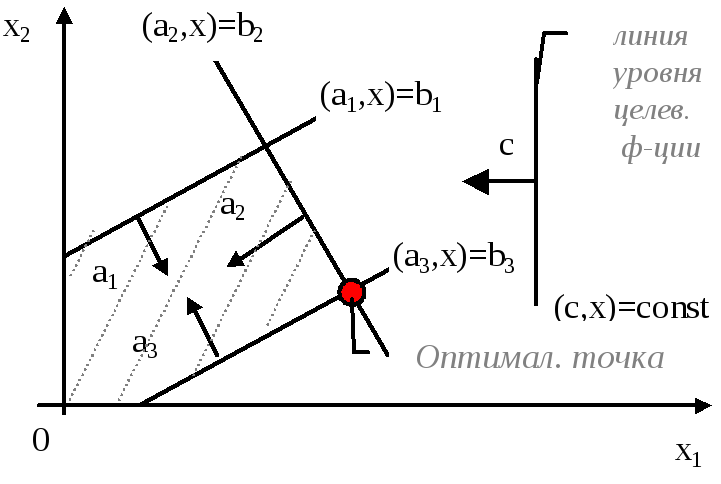
Рис.1б.
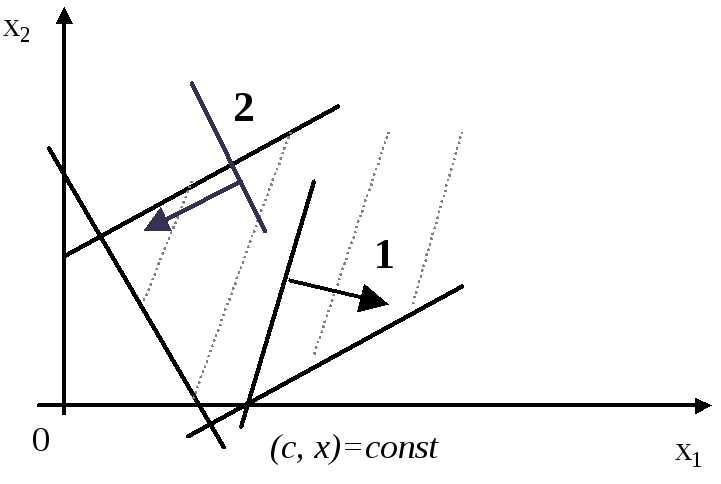
Для функции 2 (рис.2б) точки min нет. Даже в случае неограниченного допустимого множества оптимальная точка может существовать ( но ее может и не быть) .