

4.2. Динамическое программирование.
Модельная задача: поиск кратчайшего пути на графе.
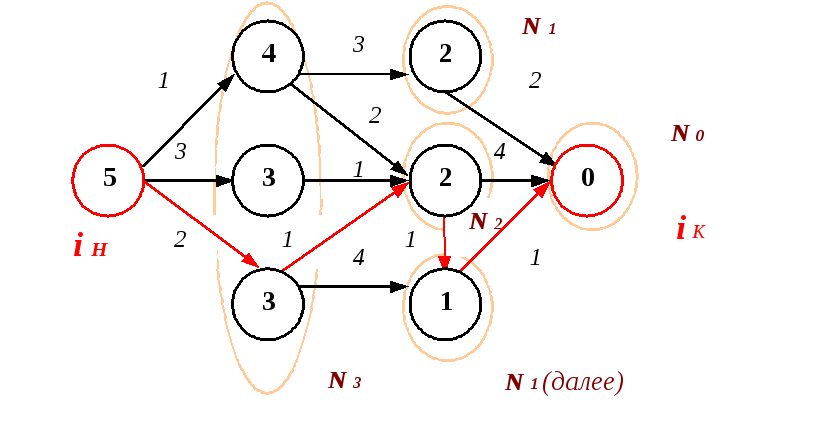
Рис.1
На
дугах проставлены расстояния между
двумя вершинами. В вершинах - кратчайшее
расстояние до конечной вершины
![]() .
.
Кратчайший
путь
![]()
![]() имеет
длину 5.
имеет
длину 5.
Этот граф без циклов.
Таким образом, можно разметить любой граф без циклов.
Двигаемся от конечной вершины к начальной:
любая вершина - состояние процесса,
дуги - переходы.
Таким образом, задача: на множестве всех траекторий выбрать ту, длина которой минимальна.
4.2.1. Абстрактная схема.
Пусть
-
конечное множества состояний и конечное
множество управлений U.
На некотором подмножестве
U
задана функция перехода
![]() :
.
Пусть есть последовательность состояний
{
:
.
Пусть есть последовательность состояний
{![]() ,
,![]() ,...,
,...,![]() }
и последовательность управлений
{
}
и последовательность управлений
{![]() ,
,![]() ,...,
,...,![]() },
для которых
(
},
для которых
(![]() )
=
)
=![]() .
.
Определение: Совокупность состояний и управлений называется траекторией процесса.
 (
множество состояний )
(
множество состояний )
Введем множество траекторий Т, соединяющих начальные и конечные вершины.
Пусть на Т задан функционал:
![]() (*)
(*)
Требуется найти траекторию с минимальным значением функционала:
![]() J
(t)
?
J
(t)
?
Заметим, что (*) можно представить в виде:
J
(![]() ,...,
,...,![]() )
=
)
=
Функционал такого вида называется аддитивным. Следует подчеркнуть, что динамическое программирование применимо, если функционал аддитивный.
Метод динамического программирования позволяет свести минимизацию функции n переменных к n одномерным минимизациям.
4.2.2. Вывод уравнения Беллмана.
Пусть
![]() -
множество траекторий , ведущих изi-й
вершины в конечную.
-
множество траекторий , ведущих изi-й
вершины в конечную.
Обозначим
![]() -множество
управлений, допустимых для данной
вершины.
-множество
управлений, допустимых для данной
вершины.
(u![]() ,
,![]() )
)
вершина ,в которой осуществляется переход
Тогда
![]() =
=![]() (2)
(2)
![]() -
хвост траектории.
-
хвост траектории.
Введем функцию:
Z(![]() )
=
)
=![]() J
(t)
(3)
J
(t)
(3)
Используя (2) получим соотношение для функции (3):
Z(![]() )
=
)
=![]()
![]() J
((
J
((![]() ,u),
,u),![]() )
)
![]()
Представим функционал через (*):
![]()
![]()
![]()
![]()
![]()
Выделим первую компоненту этой суммы:
![]() +
+![]()
![]() не
зависит от (i,uj)
при j1
(«хвоста траектории»).
не
зависит от (i,uj)
при j1
(«хвоста траектории»).
Поэтому :
*
Z(
(![]()
![]() ,u))
см.(3)
,u))
см.(3)![]() (
(![]() +
+![]()
![]() )
)![]()
![]()
![]() (
(![]() +
Z(
(
+
Z(
(![]() ,u)))
,u)))
Существуют
марковские процессы или процессы без
предыстории ( так
называются процессы, развитие которых
при t >![]() не зависит от характера их протекания
при t<
не зависит от характера их протекания
при t<![]() ).
).
Например, процесс задачи коммивояжера не марковский (очевидно).
Для процессов марковского типа Беллман сформулировал так называемый принцип оптимальности:
Конечный участок оптимальной траектории (хвост) является оптимальной траекторией.
Учитывая принцип оптимальности , можем написать:
![]() =
=![]() (
(![]() +
+![]() )- уравнение
Беллмана
)- уравнение
Беллмана
![]() -функция
Беллмана
-функция
Беллмана
![]() =
0 (н.у. для
рекурсии)
=
0 (н.у. для
рекурсии)
![]() -конечная
вершина.
-конечная
вершина.
4.2.3. Методика применения функции Беллмана для решения исходной задачи.
Рассмотрим
множество вершин
![]() ,
из которых можно попасть только в
конечную (см.
рис.1),
,
из которых можно попасть только в
конечную (см.
рис.1),
![]() =
0 (
=
0 (![]() -конечная
вершина).
-конечная
вершина).
С
помощью уравнения Беллмана можно
рассчитать
![]() в любой точке множества
в любой точке множества![]() .
.
Для каждой из этих вершин можно зафиксировать управление u , на котором
достигается min уравнения Беллмана.
Рассмотрим
множество вершин,
![]() , из которых
можно попасть только в
, из которых
можно попасть только в
![]() .
С помощью уравнения Беллмана можно
вычислить
.
С помощью уравнения Беллмана можно
вычислить![]() в любой точке
в любой точке![]() и зафиксироватьu,
на котором достигается min
уравнения Беллмана.
и зафиксироватьu,
на котором достигается min
уравнения Беллмана.
Описанные
действия повторяют, пока не вычислят
![]() в начальной вершине. Это и будет значение
функционала.
в начальной вершине. Это и будет значение
функционала.
Описанный процесс часто называют обратным ходом, за которым следует прямой, в течение которого определяют оптимальную траекторию, которая определяется через выбранные при обратном ходе управления для каждой вершины.