

2.4. Управление вертолетом
2.4.1. Путевое управление
Вращение НВ создает реактивный момент, поворачивающий корпус вертолета в сторону, противоположную вращению винта. На одновинтовых вертолетах реактивный момент уравновешивают с помощью рулевого винта, (рис. 2.12, а) на вращение которого затрачивается 6-8 % от мощности двигателя. Момент Mp.в, создаваемый рулевым винтом
Mр.в = Pр.вLр.в, (2.6)
где Pр.в – тяга, создаваемая винтом; Lр.в – плечо действия силы Рр.в относительно центра тяжести вертолета.
Для противодействия боковой силе рулевого винта силу тяги НВ приходится отклонять в противоположную сторону. Если в полете изменить тягу рулевого винта, то равновесие моментов нарушится, и вертолет начнет поворачиваться вокруг вертикальной оси. На практике путевое управление осуществляется педалями, изменяющими установочный угол, а следовательно, и тягу рулевого винта (рис. 2.12, б). Лопасти рулевого винта к втулке крепят при помощи горизонтального и осевого шарниров. Осевой шарнир позволяет изменять угол установки лопасти, т.е. изменять силу тяги, а горизонтальный допускает колебания лопасти подобно колебаниям лопасти НВ, что приводит к уменьшению неравномерности действия аэродинамических сил. На вертолетах с несколькими винтами винты вращаются в противоположных направлениях, и их реактивные моменты взаимно уравновешиваются.
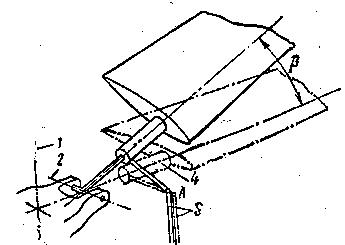
Рис. 2.11.Схема работы регулятора взмаха:
1 – ось несущего винта; 2 – ось ГШ; 3 – тяга к автомату перекоса;
4 – ось поворота лопасти.

Рис. 2.12. Схемы уравновешивания реактивного момента М
и путевого управления одновинтового вертолета.
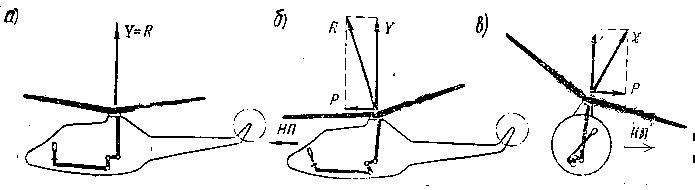
Рис. 2.13. Режимы полета вертолета и положение рычага управления, действующего на вертолет:
а – висение; б – горизонтальный полет; в – боковое движение.
2.4.2. Автомат перекоса
Тяга, необходимая для поступательного перемещения вертолета, может быть получена следующими способами:
наклоном оси НВ,
наклоном втулки НВ,
циклическим (азимутальным) изменением угла установки лопастей НВ;
специальными винтами или реактивными двигателями.
Первые три способа приводят к наклону в желаемую сторону плоскости вращения НВ при соответствующих отклонениях рычага управления (рис. 2.13). При этом в соответствующем направлении наклоняется вектор равнодействующей аэродинамических сил R, вертикальная составляющая которого дает подъемную силу Y, уравновешивающую силу веса G, а горизонтальная составляющая – тягу Р для движения по горизонту.
В обычных вертолетах с поршневым или газотурбинным двигателем осуществлять наклон оси и втулки НВ очень трудно. Это проще сделать на реактивных вертолетах, где нет передачи крутящего момента через вал. В настоящее время наиболее распространенный способ управления НВ – циклическое изменение угла установки лопасти при ее вращении по азимуту. Оно обычно осуществляется с помощью автомата перекоса (рис. 14). Рычаг 12 управления вертолетом тягами связан с внутренними не вращающимися кольцами автомата перекоса. Три не вращающихся кольца образуют универсальный шарнир, который может наклоняться вперед, назад, вбок, а также подниматься и опускаться. Внешнее кольцо автомата является обоймой шарикового подшипника и вращается вместе с валом. К кольцу крепят тяги 9, которые соединены с рычагами поворота лопастей относительно ОШ. Вертикальное перемещение тяг изменяет углы установки лопастей. При наклоне кольца автомата перекоса тяги 9 за один полный оборот НВ будут поднимать и опускать рычаги лопастей и таким образом вызовут циклическое изменение углов установки лопастей от максимального значения до минимального. Например при движении рычага управления 12 вперед, передняя часть кольца опускается, а задняя поднимается. В таком случае у каждой лопасти при вращении в передней части окружности, т.е. в диапазоне азимутальных углов 90…270○, углы установки лопастей будут меньше начальных (достигая минимального значения при ψ = 180○), а при движении в задней части окружности в диапазоне от 270 до 90○, углы установки лопастей становятся больше начальных с максимальным значением в точке, соответствующей азимуту ψ = 0. В точках же, соответствующих углу ψ = 90○ и ψ = 270○, угол установки будет средним и равным начальному.
Колебания угла установки вызовут изменение угла атаки, что в свою очередь приведет к колебаниям аэродинамических сил лопастей. Тогда конус вращения НВ наклонится в сторону с меньшими углами атаки, для рассматриваемого случая – вперед. В ту же сторону наклонится и вектор равнодействующей аэродинамических сил R.
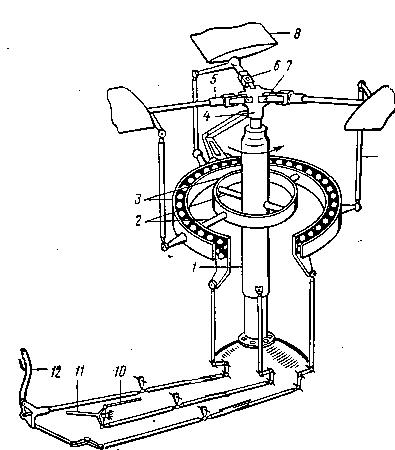
Рис 2.14. Схема управления и автомат перекоса:
1 – труба; 2 – ось карданной подвески; 3 – наружное и внутреннее кольцо автомата перекоса; 4 – втулка винта; 5 – ось осевого шарнира; 6 – ось вертикального шарнира; 7 – ось горизонтального шарнира; 8 – лопасть несущего винта; 9 – тяга; 10 – тяга управления двигателем; 11 – рычаг общего шага; 12 – рычаг управления.
При движении ручки управления назад конус вращения отклоняете также назад. Отклоняя ручку вправо или влево, пилот добивается соответствующего наклона конуса вращения, что и вызывает поступательное перемещение вертолета в сторону отклонения рычага. Одновременно вследствие возникновения момента от горизонтальной составляющей тяги относительно центра тяжести вертолета его конус наклоняется в ту же сторону, что и плоскость вращения НВ. Таким образом, в поступательном полете лопасти НВ совершают маховые движения вследствие наклона автомата перекоса и несимметричного поля скоростей, вызванных поступательным движением вертолета.
Одновременное изменение угла установки лопастей (изменение общего шага) осуществляется перемещением рычага 11, расположенной обычно слева от пилота. При подъеме рычага одинаково увеличивается угол установки всех лопастей, при опускании угол установки уменьшается. Вертолет в результате поднимается или опускается. Так как изменение общего шага уменьшает или увеличивает мощность потребную для вращения НВ, то рычаг общего шага 11 соединяется с тягой 10 управления двигателем. Поэтому этот рычаг принято называть «шаг-газ». При перемещении его вверх одновременно с увеличением общего шага НВ увеличивается мощность двигателя. Это взаимодействие осуществляется таким образом, чтобы на всех режимах, высотах и скоростях полета частота вращения НВ и двигателя была неизменной.
На верхней части рычага «шаг-газ» имеется поворотная рукоятка коррекции газа двигателя, с помощью которой пилот имеет возможность при неизменном шаге в некоторых пределах изменять мощность, а следовательно, и частоту вращения двигателя. Изменение частоты вращения НВ при неизменном установочном угле дает возможность вертолету маневрировать в вертикальной плоскости. В самом нижнем положении рычага «шаг-газ» НВ переводится на малые установочные углы, соответствующие режиму самовращения. При работе НВ в режиме косой обдувки количество воздуха, проходящего в плоскости вращения винта, увеличивается по сравнению с количеством воздуха, проходящего при осевой обдувке. Это приводит к тому, что при увеличении скорости полета до некоторого значения Vэк и сохранении постоянной тяги винта мощность, потребная для полета, уменьшается. При дальнейшем повышении скорости полета вследствие увеличения профильного сопротивления лопастей и фюзеляжа вертолета потребная для полета мощность начинает увеличиваться.
У современных вертолетов значение скорости полета Vэк при которой винт развивает максимальную тягу с минимальной затратой мощности, составляет 80-110 км/ч. Мощность затрачиваемая на вращение НВ, называется потребной. Она меньше располагаемой мощности двигателя на значение мощности затрачиваемой на привод хвостового винта. Мощность, потребная для выполнения полета, складывается из суммы мощностей, затрачиваемых на преодоление профильного и индуктивного сопротивления НВ и вредного сопротивления не несущих частей вертолета
Nг п = Nпр + Nинд + Nвр. (2.7)
Разность между располагаемой и потребной мощностями называют избытком мощности ΔN (рис. 2.15). На графике указаны характерные режимы полета:
точка А – режим висения вертолета;
точка Б – экономический режим полета с наименьшей потребляемой мощностью и соответственно с наименьшим часовым расходом топлива. При этом продолжительность полета наибольшая;
точка В – наивыгоднейший режим полета. При полете со скоростью Vнв вертолет расходует минимальное количество топлива на 1 км пути. Следовательно, при этом дальность полета будет максимальной. Точку В определяют графически, проводя касательную к кривой потребных мощностей из начала координат;
точка Г – режим максимальной скорости полета вертолета. У вертолетов практические максимальные допустимые скорости полета могу: быть несколько меньше расчетных.
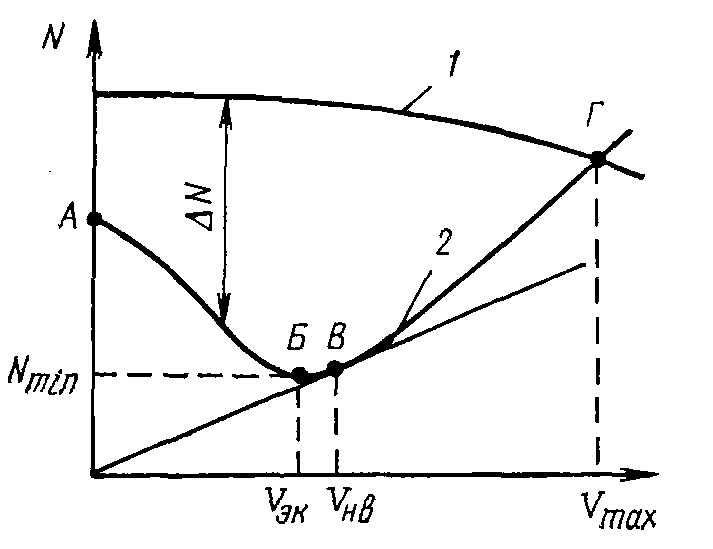
Рис. 2.15. Зависимость располагаемой (1) и потребной (2) мощности
от скорости полета.
Максимальная скорость современных вертолетов не превышает 350 км/ч. Увеличению скорости препятствует два явления – вредное периодическое влияние сжимаемости потока воздуха на концах лопастей несущего винта, идущих вперед, и срыв потока на концах лопастей, идущих назад. В режиме косой обдувки результирующая скорость воздушного потока, набегающего на винт, зависит от азимутального положения лопастей, достигая максимального значения при азимуте ψ = 90○, Wmax = 2rns + V (рис. 2.7). Как видно, результирующая скорость растет пропорционально скорости полета и с ростом последней может достичь звуковых и сверхзвуковых значений. Это приводит к увеличению лобового сопротивления, вызывая увеличение потребной для полета мощности, изменения устойчивости и управляемости. Чтобы исключить нежелательный эффект от сжимаемости потока, скорость W конца лопасти при ψ = 90○ должна быть не больше 275 м/с (М = V/a = ≈ 8,8). Из рис. 2.7 также следует, что у лопасти, идущей назад, скорости окружная u и поступательная V направлены в противоположные стороны. При достижении некоторой скорости, превышающей предельно допустимую, благодаря взмаху угол атаки на конце отступающей лопасти становится больше критического и здесь образуется срыв воздушного потока, и подъемная сила уменьшается. В результате уменьшения подъемной силы с одной стороны ометаемой лопастями окружности возникает кренящий момент, который стремится опрокинуть вертолет в сторону лопасти, идущей назад. Вертолет начинает резко раскачиваться в продольном и поперечном направлениях и перестает реагировать на отклонение органов управления. При этом необходимо уменьшение общего шага несущего винта и снижение скорости полета.
С подъемом на высоту вследствие уменьшения плотности воздуха мощность, потребная для полета на скорости меньше наивыгоднейшей, повышается, а при скорости больше наивыгоднейшей уменьшается. Наивыгоднейшая скорость с подъемом на высоту практически остается неизменной, а максимальная скорость полета повышается. Вертикальная скорость подъема до расчетной высоты увеличивается, а с подъемом на большую высоту уменьшается. Высоту, на которой избыток мощности, а значит, и вертикальная скорость подъема становятся равными нулю, называют динамическим потолком вертолета. Теоретический полет на высоте динамического потолка возможен только на экономической скорости.
При оценке летных возможностей вертолета пользуются понятием практического потолка, понимая под этим высоту полета, на которой при работе двигателя на номинальной мощности вертикальная скорость набора высоты равна 0,5 м/с. Максимально достижимая высота при вертикальном подъеме вертолета называется статическим потолком. В настоящее время статический потолок вертолетов приближается к высоте 3000…3500 м, а динамический потолок к 6000…7000 м.