

2.3. Основы аэродинамики вертолетов
Несущий
винт вертолета создаёт подъёмную силу,
поддерживающую аппарат
в полете, и тягу, необходимую для
поступательного перемещения. Лопасть
винта можно рассматривать как крыло
особой формы, совершающее сложное
движение: вращение относительно оси
винта, перемещение вместе с корпусом
аппарата и колебания вокруг осей трех
шарниров. Различают два режима работы
НВ: 1) осевой обдувки, соответствующий
вертикальному подъему, спуску и «висению»
вертолета и 2) косой обдувки, соответствующий
полету вертолета в горизонтальной
плоскости
![]() или
под углом к горизонту.
или
под углом к горизонту.
В установившемся режиме осевой обдувки условия работы лопастей при любом их положении одинаковые, в режиме косой обдувки условия обтекания
Рис. 2.1. Рис. 2.2.

Рис. 2.3. Рис. 2.4.

Рис. 2.5. Рис. 2.6.
лопасти периодически меняются. Поэтому при поступательном перемещении вертолета аэродинамические силы и моменты, возникающие на каждой лопасти НВ, имеют периодический характер, изменяясь кратно частоте вращения винта (рис. 2.7).
Скорость
воздушного потока, взаимодействующего
с лопастями винта в плоскости его
вращения, зависит от азимутального
положения лопасти относительно
какой-либо оси. За нулевое азимутальное
положение обычно принимают крайнее
заднее положение лопасти, что соответствует
положению лопасти над хвостовой балкой
одновинтового вертолета. Азимутальный
угол обозначают буквой
![]() .
Результирующую скорость
.
Результирующую скорость
![]() воздушного потока, набегающего на винт,
в каждом сечении лопасти можно определить
как сумму векторов окружной скорости
воздушного потока, набегающего на винт,
в каждом сечении лопасти можно определить
как сумму векторов окружной скорости
![]() ,
не меняющейся по азимуту, и скорости
полета
,
не меняющейся по азимуту, и скорости
полета
![]() ,
переменной по азимуту
,
переменной по азимуту
![]() ,
(2.2)
,
(2.2)
где r – радиус рассматриваемого сечения лопасти; ns-частота вращения винта.
Для случая осевой обдувки V = 0 результирующая скорость W = 2rns постоянна для любого азимутального положения лопасти. При поступательном перемещении со скоростью V результирующая скорость будет переменной, меняясь от Wmax = 2rns + V при ψ = 90○ до Wmin = 2rns - V при ψ = 270○.
Как известно, аэродинамические силы через их коэффициенты могут быть выражены следующим образом:
Подъемная
сила
![]() (2.3)
(2.3)
Сила
лобового сопротивления
![]() (2.4)
(2.4)
где
cy,
cx
– соответственно,
коэффициенты подъемной силы и силы
лобового сопротивления; S
– площадь лопасти в плане;
![]() – скоростной
напор.
– скоростной
напор.
Аэродинамические силы пропорциональны квадрату скорости потока, поэтому подъемная сила лопасти и сила лобового сопротивления за полный оборот будут непрерывно изменяться от минимума до максимума.
Периодичность аэродинамических сил и моментов приводит к возникновению вибрации и тряски, которая передается на корпус ЛА. У вертолетов с жестким креплением лопастей к втулке при переходе в горизонтальный полет, а также при порыве ветра возникает опрокидывающий момент, т.к. в одной половине диска, ометаемого лопастями, подъемная сила становится больше, чем в другой. Для устранения этих неблагоприятных явлений применяют конструкцию, в которой лопасти к втулке крепятся при помощи трех шарниров (рис. 2.8): осевого (ОШ), горизонтального (ГШ) и вертикального (ВШ). ОШ позволяет изменять угол установки лопасти и аэродинамические силы, а ГШ и ВШ допускают колебания лопасти в вертикальной и горизонтальной плоскостях.
В режиме осевой обдувки при наличии шарнирного крепления лопасть сама находит себе положение, обеспечивающее ее равновесие, при котором сумма
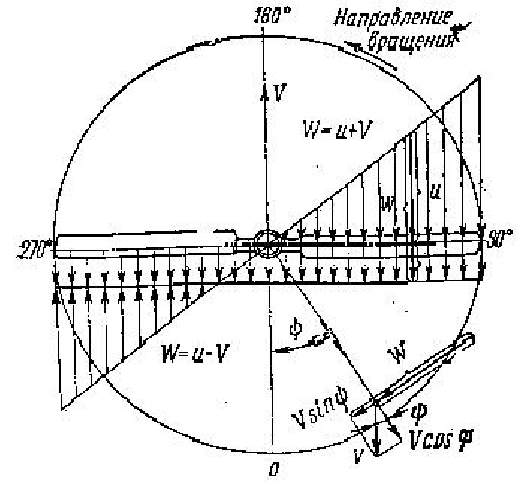
Рис. 2.7. Распределение скоростей на лопастях
несущего винта.
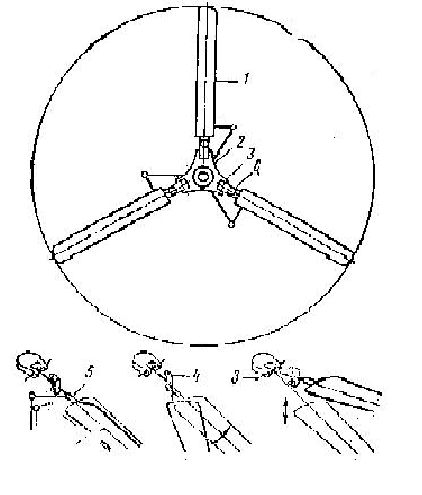
Рис. 2.8. Схема шарнирного крепления лопастей:
1 – лопасть; 2 – корпус втулки; 3 – горизонтальный шарнир;
4 – вертикальный шарнир; 5 – осевой шарнир.
моментов сил, действующих на лопасть относительно ГШ и ВШ, равна нулю. В плоскости, проходящей через ось лопасти и ось вращения при установившемся вращении на каждую лопасть действуют подъемная сила Y, сила веса лопасти G и ценробежная сила (рис. 2.9)
Fцб = (G/g)2rц.т, (2.5)
где – круговая частота вращения лопасти; rц.т – расстояние центра тяжести лопасти от оси вращения.
Вес лопасти по сравнению с центробежной и подъемными силами незначителен, а центробежная сила обычно более чем в 10 раз превышает подъемную силу. Лопасть под действием центробежной силы Fцб стремится расположиться в горизонтальной плоскости, однако равнодействующая двух других сил (подъемной силы и силы веса) заставляет ее отклоняться от этой плоскости вверх на некоторый угол β (рис. 2.9). Равновесие наступает при равенстве нулю суммы моментов рассмотренных сил относительно ГШ. Угол β зависит как от подъемной силы, так и от частоты вращения НВ. В результате движение лопастей НВ происходит не в плоскости вращения его втулки, а по поверхности конуса, угол β которого называют углом конусности.
Равновесие каждой лопасти относительно ВШ в режиме осевой обдувки определяется равенством нулю сумм моментов сил, действующих в горизонтальной плоскости (силы лобового сопротивления Xа и центробежной силы Fцб). Сила лобового сопротивления создает момент, под действием которого лопасть отклоняется (отстает) от своего положения на угол ξ. Центробежная сила Fцб создает восстанавливающий момент. Угол ξ называется углом отставания лопасти.
Для того чтобы понять, каким образом ГШ и ВШ уменьшает аэродинамическую силу НВ при его косой обдувке, проследим за движением лопасти за один полный оборот (рис. 2.10).
Штрих
пунктирной линией показана траектория
конца лопасти, а сплошной – проекция
окружности, описываемой концом лопасти,
на горизонтальную плоскость. Пусть
скорость полета равна V,
угловая скорость вращения винта
и углы установки лопастей φ постоянны.
В положении I
вследствие наличия подъемной силы
траектория конца лопасти будет проходить
выше сплошной линии. При движении лопасти
из положения I
в II
результирующая скорость
![]() каждого сечения лопасти, а значит, и
подъемная сила увеличиваются. Лопасть
поднимается вверх, совершая свободный
взмах относительно ГШ. Угол атаки, равный
до взмаха φ, вследствие движения лопасти
вверх уменьшится и станет равным α.
Таким образом, взмах парирует начавшийся
рост подъемной силы, т.е. взмах автоматически
регулирует значение подъемной силы.
Переходя от II
к III,
лопасть продолжает двигаться вверх.
Когда лопасть переходит во вторую
половину окружности, ее результирующая
скорость и подъемная сила уменьшается.
Под действием момента от центробежной
силы лопасть начинает двигаться вниз,
что вызывает увеличение истинного угла
атаки.
каждого сечения лопасти, а значит, и
подъемная сила увеличиваются. Лопасть
поднимается вверх, совершая свободный
взмах относительно ГШ. Угол атаки, равный
до взмаха φ, вследствие движения лопасти
вверх уменьшится и станет равным α.
Таким образом, взмах парирует начавшийся
рост подъемной силы, т.е. взмах автоматически
регулирует значение подъемной силы.
Переходя от II
к III,
лопасть продолжает двигаться вверх.
Когда лопасть переходит во вторую
половину окружности, ее результирующая
скорость и подъемная сила уменьшается.
Под действием момента от центробежной
силы лопасть начинает двигаться вниз,
что вызывает увеличение истинного угла
атаки.
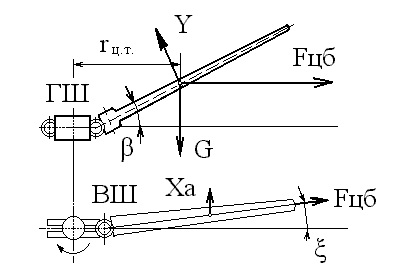
Рис. 2.9. Силы, действующие на лопасть несущего
винта в режиме осевой обдувки.

Рис. 2.10. Схема махового движения лопастей несущего винта
и зависимость угла взмаха лопасти от азимута.
Следовательно, каждая лопасть за один оборот поднимается и опускается, т.е. делает взмах, и благодаря этому подъемная сила в любом азимутальном положении остается примерно постоянной.
В азимуте ψ = 90○, скорость обтекания лопасти будет максимальной, следовательно, и скорость взмаха Vy будет максимальной, а угол α в сечении лопасти максимальным. При движении от ψ = 90○, до ψ = 180○, скорость обтекания сечения уменьшается, но вследствие инерции лопасть будет продолжать подниматься с уменьшающейся скоростью Vy. Поэтому максимальный угол взмаха βмах достигается в азимутальном положении между 180 и 220○. Минимальная скорость обтекания будет в азимуте 270○, а скорость опускания лопасти и угол атаки сечений в этом положении небольшие. При дальнейшем повороте, несмотря на начавшееся увеличение результирующей скорости обтекания, лопасть под действием сил инерции некоторое время продолжает опускаться и минимальное значение угла взмаха βмин займет в азимутальном положении между 0 и 40○.
Амплитуда маховых движений лопастей возрастает при увеличении скорости полета. Для того чтобы уменьшить взмах лопасти применяют поводковые регуляторы взмаха (рис. 2.11). Сущность действия их заключается в том, что они уменьшают угол установки при подъеме лопасти и увеличивают его при опускании. Это происходит потому, что тяга, управляющая поворотом лопасти, во взмахах не участвует, и точка A практически остается неподвижной.
Точно так же, как лопасть колеблется относительно ГШ, она периодически колеблется в плоскости вращения относительно ВШ. Эти колебания возникают по двум причинам: вследствии периодического изменения аэродинамических сил в плоскости вращения и периодического изменения массовых сил. Например, при поступательном перемещении вертолета лопасть, вращаясь, обтекается потоком с различными скоростями и, следовательно, на нее действуют изменяющиеся аэродинамические силы. Демпфирование лопасти производится в основном центробежной силой, а также аэродинамической силой лобового сопротивления, возрастающей при ускорении движения лопасти вперед. Но это демпфирование недостаточно, поэтому лопасти снабжаются фрикционным или гидравлическим демпфером, который устанавливают у корня лопастей. При отсутствии махового движения нет и колебаний лопастей в плоскости вращения.