

Аналіз точності лінійних безперервних стаціонарних систем
Розглянута
у попередньому розділі стійкість систем
радіоавтоматики – необхідна, але
недостатня вимога, що визначає можливість
використання системи. Придатність
системи для кожного конкретного випадку
застосування характеризує точність,
яка визначається помилкою
слідкування
![]() - різницею між вхідним впливом
- різницею між вхідним впливом ![]() і
вихідним процесом
і
вихідним процесом
![]() [1-4]:
[1-4]:
![]() .
.
Зазвичай|звично| досліджують точність систем в двох простих режимах роботи: після|потім| закінчення перехідного процесу (статичні і швидкісні помилки) і протягом перехідного процесу (динамічні помилки). Якщо на вхід системи подається постійний зовнішній вплив, то після закінчення перехідного процесу наступає сталий режим, і якщо зовнішній вплив змінюється значно повільніше, ніж перехідна функція, то в системі встановлюється вимушений режим. Помилки, що виникають в сталих режимах, називають статичними, а у вимушених режимах – швидкісними. Точність системи протягом перехідного процесу досліджують найчастіше при одиничному ступінчастому впливі.
Помилки замкнених систем після|потім| закінчення перехідного процесу при детермінованих впливах
Розглянемо|розглядуватимемо|
систему радіоавтоматики, узагальнена
структурна схема якої має вигляд|вид|,
показаний на
рис.2.1,
де
- корисний
вплив,
![]() - заважаючий
вплив, |мішає
-
вихідний процес,
-
помилка слідкування,
- заважаючий
вплив, |мішає
-
вихідний процес,
-
помилка слідкування,
![]() -
коефіцієнт підсилення
лінеаризованого дискримінатора,
-
коефіцієнт підсилення
лінеаризованого дискримінатора,
![]() -
передаточна|передаточна|
функція лінійної частини|частки|
системи.
-
передаточна|передаточна|
функція лінійної частини|частки|
системи.
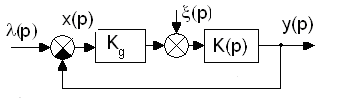
Рис.2.1
Враховуючи,
що система лінійна і справедливий
принцип суперпозиції, легко визначити
передаточну|передаточні|
функцію
по помилці
для корисного повідомлення|сполучення|
![]() ,
позначену як
,
позначену як
![]() і для заважаючого
впливу|мішає|
і для заважаючого
впливу|мішає|
![]() ,
позначену як
,
позначену як
![]() :
:
![]() (2.1)
(2.1)
Нехай корисний і заважаючий впливи є|з'являються| детермінованими процесами і описуються поліномами
![]()
![]()
Тоді помилки після|потім| закінчення перехідного процесу визначаються виразами
![]() (2.2)
(2.2)
![]() (2.3)
(2.3)
де
![]() ,
,
![]() - к-та
похідна корисного
і
заважаючого
впливу|мішає|;
- к-та
похідна корисного
і
заважаючого
впливу|мішає|;
![]() ,
,
![]() - коефіцієнти помилок, пов'язані з
передаточними|передаточними|
функціями по
помилці
співвідношеннями
- коефіцієнти помилок, пов'язані з
передаточними|передаточними|
функціями по
помилці
співвідношеннями
![]()
 (2.4)
(2.4)
Значення
коефіцієнтів
![]() и
дозволяють
визначити порядок астатизму системи
для
впливів
и
відповідно,
який дорівнює номеру першого
відмінного від нуля
коефіцієнту
або
.
Якщо коефіцієнт
и
дозволяють
визначити порядок астатизму системи
для
впливів
и
відповідно,
який дорівнює номеру першого
відмінного від нуля
коефіцієнту
або
.
Якщо коефіцієнт
![]() або
або
![]() система має
астатизм нульового порядку, тобто є
статичною.
система має
астатизм нульового порядку, тобто є
статичною.
Характерна
особливість астатичних систем полягає
в тому, що при подаванні
на систему з астатизмом
![]() -
го порядку впливу,
що описується поліномом ступеня
,
помилка в сталому режимі постійна і
відмінна від нуля. Якщо ж ступінь
полінома, що описує
вплив,
менше
,
то стале значення помилки слідкування
дорівнює нулю.
-
го порядку впливу,
що описується поліномом ступеня
,
помилка в сталому режимі постійна і
відмінна від нуля. Якщо ж ступінь
полінома, що описує
вплив,
менше
,
то стале значення помилки слідкування
дорівнює нулю.
Унаслідок
лінійності системи результуюча помилка
дорівнює сумі помилок
![]() і
і
![]() :
:
![]() .
(2.5)
.
(2.5)