

4 Аналіз нелінійних систем радіоавтоматики
Багато систем автоматичного регулювання не можуть бути з достатньою точністю, а іноді навіть якісно правильно описані лінійними диференціальними рівняннями з постійними коефіцієнтами. Наприклад, неможливо за допомогою лінійних методів досліджувати системи, що працюють в коливальному або релаксаційному режимі, врахувати вплив обмеження, люфтів, насичення і багатьох інших явищ, що мають місце в реальних системах.
Системи, поведінка яких описується нелінійними диференціальними рівняннями, називаються нелінійними системами автоматичного управління. З математичної точки зору найбільш значна відмінність лінійних систем від нелінійних полягає в тому, що до них не застосовний принцип суперпозиції, на якому заснований аналіз лінійних систем. Тому для дослідження нелінійних систем при детермінованих впливах застосовують такі наближені методи: безпосередньої лінеаризації, кусочно-лінійної апроксимаціі, фазової площини, гармонійного балансу, малого параметра і моделювання на ЕОМ.
Для аналізу нелінійних систем при випадкових впливах застосовуются найчастіше два методи: метод, заснований на теорії марківських випадкових процесів, і метод статистичної лінеаризації.
Далі розглянуті два методи аналізу нелінійних систем радіоавтоматики: метод гармонічної лінеарізації та метод статистичної лінеарізації.
4.1. Метод гармонічної лінеаризації (гармонічного балансу).
Метод гармонічної лінеаризації призначений для дослідження умов виникнення автоколивань і визначення амплітуди і частоти автоколивань в нелінійних системах.
Хай замкнута система складається з послідовно включених нелінійної безінерційної ланки НЛ і лінійної інерційної частині ЛЧ (рис.4.1).
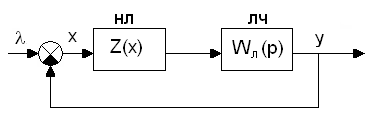
Рис. 4.1
У
разі впливу
на вхід НЛ
гармонічного
синусоїдального сигналу
![]() на
його виході
на
його виході
![]() міститься спектр гармонічних
складових з амплітудами
міститься спектр гармонічних
складових з амплітудами
![]() ,
,![]() ,…
і частотами
,…
і частотами
![]() ,
2
,
… . Передбачається, що сигнал
,
2
,
… . Передбачається, що сигнал
![]() , проходячи через лінійну частину
, проходячи через лінійну частину
![]() ,
фільтрується нею в такому ступені, що
в сигналі на виході
лінійної частини
,
фільтрується нею в такому ступені, що
в сигналі на виході
лінійної частини
![]() можна нехтувати всіма вищими гармоніками
можна нехтувати всіма вищими гармоніками
![]() ,
,
![]() ,
… і вважати
,
… і вважати
![]() .
.
Останнє припущення носить назву гіпотези фільтру і є необхідною умовою гармонічної лінеаризації [4] .
Для справедливості гіпотези фільтру необхідна така характеристика лінійної частини щоб, проходячи через неї, всі гармоніки, окрім першої, затухали до малих значень, якими можна нехтувати . Математично цю умову можна виразити співвідношенням
![]() ,
,
де
![]() =2,
3, … - номер гармоніки.
=2,
3, … - номер гармоніки.
Звертаючись
до структурної схеми, помічаємо, оскільки
автоколивання
мають місце при
![]() ,
то
,
то
![]() ,
а при виконанні
гіпотези фільтру це
означає:
,
а при виконанні
гіпотези фільтру це
означає:
![]() ;
;
![]() .
.
Нелінійна ланка при дії на її вхід гармонійного сигнала може бути описана (у припущенні справедливості гіпотези фільтру) комплексним коефіцієнтом підсилення, рівним відношенню комплексної амплітуди першої гармоніки вихідного сигналу до комплексної амплітуди вхідного гармонічного сигналу.
Розглянемо
безінерційну нелінійну ланку з
характеристикою
![]() .
Якщо на вхід нелінійної
ланки діє гармонічний
сигнал
.
Якщо на вхід нелінійної
ланки діє гармонічний
сигнал
![]() ,
то періодичний сигнал
на виході НЛ
можна представити у вигляді ряду Фурье:
,
то періодичний сигнал
на виході НЛ
можна представити у вигляді ряду Фурье:
![]() ,
,
де
![]() ;
;
![]() .
.
Вважаючи,
що гіпотеза фільтру виконується і
![]() періодичний
сигнал при гармонічній лінеаризації
приблизно представляється своєю
першою гармонікою:
періодичний
сигнал при гармонічній лінеаризації
приблизно представляється своєю
першою гармонікою:
![]() ,
,
де
![]() ;
;
![]() .
.
Звідси комплексний коефіцієнт підсилення нелінійної ланки:
![]() ;
;
![]() ;
(4.1)
;
(4.1)
![]() ;
;
 ,
,
![]() .
.
Комплексний
коефіцієнт підсилення
![]() показує
співвідношення амплітуд і фаз першої
гармоніки вихідного і вхідного сигналів
і в цьому сенсі нагадує комплексний
коефіцієнт передачі лінійної ланки
.
Проте у разі НЛ
залежить він не від
частоти, а від амплітуди вхідного
гармонічного
сигналу
показує
співвідношення амплітуд і фаз першої
гармоніки вихідного і вхідного сигналів
і в цьому сенсі нагадує комплексний
коефіцієнт передачі лінійної ланки
.
Проте у разі НЛ
залежить він не від
частоти, а від амплітуди вхідного
гармонічного
сигналу
![]() .
.
Показано, що гармонічний сигнал зазнає фазового зсуву при проходженні через нелінійну ланку тільки у разі неоднозначної нелінійності, наприклад типу гістерезисної характеристики. Причому уявна складова комплексного коефіцієнта підсилення [3; 4] :
![]() ,
(4.2)
,
(4.2)
де
![]() - площа неоднозначної
нелінійної
характеристики. Для
однозначної
нелінійності
- площа неоднозначної
нелінійної
характеристики. Для
однозначної
нелінійності
![]() .
.
Скориставшись комплексним коефіцієнтом підсилення НЛ, рівняння гармонічного балансу та , можна представити у вигляді
![]() . (4.3)
. (4.3)
Записавши окремо реальну і уявну частини цього рівняння

отримаємо систему рівнянь, що дозволяє визначити амплітуду і частоту можливих коливань в нелінійній системі.
Зручним способом вирішення рівняння (4.3) є запропонований Л.С.Гольдфарбом графічний метод. Перепишемо вираз (4.1) у вигляді
![]() ,
(4.4)
,
(4.4)
де
![]() -
інверсний комплексний коефіцієнт
підсилення НЛ.
-
інверсний комплексний коефіцієнт
підсилення НЛ.
На комплексній площині побудуємо графіки лівої і правої частин рівняння (4.4) (рис.4.2). В точках перетину цих годографів виконується умова гармонійного балансу. Визначимо точку стійких коливань.
Нехай зона, яка лежить праворуч від годографа лінійної частини по ходу збільшення частоти, еквівалентна наявності коренів з додатною реальною частиною, а ліворуч - з від’ємною.
Розглянемо точку 1 перетину годографів і .
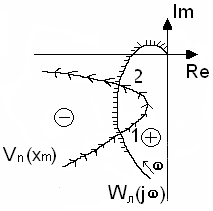
Рис.4.2.
Припустимо,
що з якоїсь
причини амплітуда автоколивань
збільшилася і
ми перемістилися
по годографу
у бік зростання
.
При цьому з точки
1 переходимо
в область
![]() ,
що еквівалентно наявності кореня з
додатною
дійсною частиною,
а це приводить до збільшення амплітуди
і порушення
стійкості коливань. Якщо припустимо,
що амплітуда автоколивань зменшилася,
то ми переміщаємося
по годографу в область,
що відповідає
наявності кореня з від’ємною
дійсною частиною,
де всі коливання повинні
затухати і, отже, амплітуда
повинна зменшуватися.
Це дозволяє зробити висновок
про нестійкість автоколивань в точці
1.
Проводячи аналогічні міркування, можна
прийти до висновку про стийкість
автоколивань в точці
2.
,
що еквівалентно наявності кореня з
додатною
дійсною частиною,
а це приводить до збільшення амплітуди
і порушення
стійкості коливань. Якщо припустимо,
що амплітуда автоколивань зменшилася,
то ми переміщаємося
по годографу в область,
що відповідає
наявності кореня з від’ємною
дійсною частиною,
де всі коливання повинні
затухати і, отже, амплітуда
повинна зменшуватися.
Це дозволяє зробити висновок
про нестійкість автоколивань в точці
1.
Проводячи аналогічні міркування, можна
прийти до висновку про стийкість
автоколивань в точці
2.
Точці 2 годографа відповідає певна амплітуда першої гармоніки, але ця точка належить також годографу , тому їй відповідає певна частота автоколивань. Таким чином, по годографу можна визначити амплітуду, а по годографу - частоту автоколивань в нелінійній системі.