

7.Як організовано взаємодію мікроконтролера із зовнішнім середовищем?Детально опишіть ф-ію процесорів подій.
Апаратні засоби удосконаленого таймеру дозволяє вирішувати багато задач керування в реальному часі.Однак,зі зростанням складності алгоритмів керування починають проявлятис ь обмеження модулів.Тому,наступним етапом розвитку модулів підсистеми реального часу мікроконтролера стали модулі процесорів подій.Вперше модулі процесорів подій були використані компанією Intel в мікроконтролерах сімейства 8xC51Fx.Цей модуль отримав назву програмованого лічильного масиву(РСА).
РСА забезпечує більш широкі можливості роботи в реальному часі і в меньшій степені розтрачує ресурси центрального процесору.До переваг РСА також можна віднести більш просте програмування і більш високу точність.Також РСА може пррацювати з тактовою чатотою втричі вищою від тактової частоти таймерів.РСА може виконувати задачі які не потребують додаткових аппаратних затрат,на відміну від таймеру.РСА складається з 16-бітного таймера-лічильника і 5 16-бітних модулей порівняння-засувки:
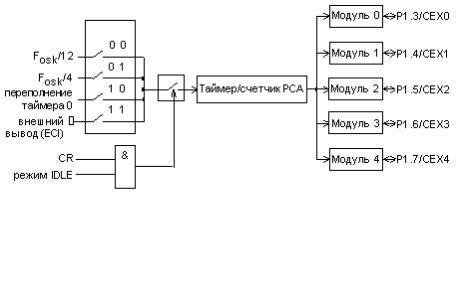
Таймер-лічильник РСА використовується в якості базового таймеру для функціонування всіх 5 модулів порівняння-засувки.Вхід таймера-лічилника РСА може бути запрограмований на рахунок сигналів від наступних джерел:
-вихід дільника на 12 тактового генератора мікроконтролера;
-вихід дільника на 4 тактового генератора мікроконтролера;
-сигнал переповнення таймеру 0;
-зовнішній вхідний сигнал на виводі ЕСІ
Довільний із модулей порівняння-засувки може бути запрограмований для роботи в наступних режимах:
-засуви по фронту або спаду імпульсу на вході СЕХІ;
-таймеру,який програмується;
-високошвидкісного виходу; -широтно-імпульсного модулятору(ШІМ) Модуль 4 може бути також запрограмований як сторожовий таймер.
Режим засуву по імпульсу на вході мікроконтролеру еквівалентний режиму вхідного захоплення вдосконаленого таймеру.Режими програмованого таймеру і високошвидкісний вихід близькі по своїм функціональним можливостям до режиму вихідного порівняння.
В режимі ШІМ на відповідному виході мікроконтролера формується послідовність імпульсів з періодом ,який рівний періоду базового таймеру/лічильнику РСА.Значення 8-розрядного коду записаного в молодший байт регістру-засувки відповідного модулю задає скважність сформованого сигналу.Також режим ШІМ дуже простий з точки зору програмного обслуговування.Якщо зміна скважності не передбачається,то достатньо один раз занести занести відповідний код в регістр даних модулю,проініціалізувати режим ШІМ,і імпульсна послідовність буде виконуватись без втручання програми.
При роботі модулю порівняння-зусувув в режимі засуву,програмованного таймеру або високошвидкісного виходу модуль може формувати сигнал переривання.Сигнали від всіх 5 модулів порівняння-засуву і сигнал переповнення таймеру РСА поділяють один вектор переривань.Тобто,якщо переривання дозволені,то і сигнал переповнення таймеру РСА і сигнал від довільного з модулів викликає одну й туж саму підпограмму переривань,яка повинна сама ідентифікувати джерело,яке її викликало.
Для роботи з зовнішніми пристроями таймер-лічильник РСА і модулі порівняння-засуву використовують виводи Р1 порту мікроконтролеру.Якщо який небудь вивід порту не використовується при роботі з РСА,або РСА не задіяний, порт може застосуватись стандартно.
Реалізований в 8хС51FX PCA виявились настільки вдалими,що архітектура даних мікроконтролеру стала промисловим стандартом,а сам РСА багатократно використовувався в різних модифікаціях мікроконтролерів різних фірм.Тенденція розвитку підсистем реального часу сучасних мікроконтролерів знайшло сво відображення в підвищенні к-сті процесорів подій і розширенню їх функціональних можливостей.