

Сложное движение точки
Движение
точки по отношению к двум или нескольким
системам отсчета называется сложным.
Движение точки М
по отношению к подвижной системе отсчета
называется относительным
(рис. 2.16).
Используются понятия: относительная
траектория, относительная скорость
(![]() )
и относительное
ускорение
(
)
и относительное
ускорение
(![]() ).
).
Рис.
2.16
![]() )
и переносным ускорением
(
)
и переносным ускорением
(![]() ).
).
Движение
точки М
по отношению к неподвижной системе
отсчета называется сложным
или абсолютным.
Используются понятия: абсолютная
траектория, абсолютная скорость
(![]() )
и абсолютное
ускорение
(
)
и абсолютное
ускорение
(![]() ).
).
Теорема. Абсолютная скорость точки равна геометрической сумме ее относительной и переносной скоростей:
![]() ,
,
здесь:
![]() скорость
относительного движения;
скорость
относительного движения;
![]() – скорость
переносного движения.
– скорость
переносного движения.
Теорема. Абсолютное ускорение точки равно геометрической сумме трёх ускорений – относительного, переносного и ускорения Кориолиса (или поворотного):
![]() ,
,
здесь:
![]() – ускорение
относительного движения;
– ускорение
относительного движения;
![]() – переносное
ускорение;
– переносное
ускорение;
![]() – ускорение
Кориолиса.
– ускорение
Кориолиса.
Ускорение
Кориолиса
(
)
равно удвоенному векторному произведению
угловой скорости переносного вращения
(![]() )
на относительную скорость точки (
):
)
на относительную скорость точки (
):
![]()
Модуль ускорения Кориолиса равен
![]() .
.
Здесь:
угол
,
угол между вектором относительной
скорости
![]() и вектором угловой скорости переносного
вращения
.
и вектором угловой скорости переносного
вращения
.
Направление ускорения Кориолиса определяется по правилу Жуковского.
Правило Жуковского (рис. 2.17):
С

Рис. 2.17
ледует провести плоскость перпендикулярно оси переносного вращения ( ).
).Спроецировать вектор относительной скорости на эту плоскость:
 .
.
Повернуть эту проекцию
 в этой плоскости на 900
по направлению
дуговой стрелки переносного вращения
в этой плоскости на 900
по направлению
дуговой стрелки переносного вращения
 .
.
Содержание контрольных работ для студентов на тему «сложное движение точки» дано в приложении (контрольная работа 1, задача 3).
П
Рис.
2.18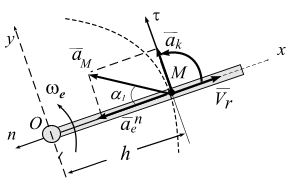
![]() в
плоскости рисунка с постоянной угловой
скоростью
в
плоскости рисунка с постоянной угловой
скоростью
![]() .
Точка М
скользит вдоль стержня со скоростью
.
Точка М
скользит вдоль стержня со скоростью
![]() .
Вычислить абсолютное ускорение точки
для момента времени 4 с (рис. 2.18).
.
Вычислить абсолютное ускорение точки
для момента времени 4 с (рис. 2.18).
Решение.
Стержень вращается в плоскости
вокруг
неподвижного центра
с
угловой скоростью
![]() с–1.
Точка М
скользит вдоль стержня со скоростью
с–1.
Точка М
скользит вдоль стержня со скоростью
![]() (рис.
2.18). Абсолютное
ускорение точки является векторной
суммой трех ускорений: относительного,
переносного и ускорения Кориолиса.
(рис.
2.18). Абсолютное
ускорение точки является векторной
суммой трех ускорений: относительного,
переносного и ускорения Кориолиса.
,
здесь:
вектор относительного ускорения
![]() ,
т. к.
,
т. к.
![]()
Вектор переносного ускорения
![]() ,
,
где
 ,
,
![]() ,
,
здесь
![]() см.
см.
вектор
![]() направлен
по
оси
.
направлен
по
оси
.
Ускорение
Кориолиса
![]() ,
,
при
![]()
 .
.
Определим
направление вектора
![]() ,
используя правило Жуковского. Угол
между вектором относительной скорости
,
используя правило Жуковского. Угол
между вектором относительной скорости
![]() и
равен
и
равен
![]() (вектор
(вектор
![]() ),
тогда вектор
разворачиваем
на
по
направлению дуговой
стрелки
),
тогда вектор
разворачиваем
на
по
направлению дуговой
стрелки
![]() (рис. 2.18).
(рис. 2.18).
Вычислим абсолютное ускорение точки :
![]()
Тангенс
угла (1)
между
![]() и осью
равен:
и осью
равен:
 .
.
В момент времени ,
 ,
,
 .
.
Ответ: аМ = 2,83 см/с2.
Пример
2.5.
Пластина В
вращается вокруг неподвижной оси
![]() согласно уравнению
согласно уравнению
![]() (рис.
2.19). На пластине по желобу движется точка
согласно уравнению
(рис.
2.19). На пластине по желобу движется точка
согласно уравнению
 см.
см.
В
Рис.
2.19
![]() .
.
Решение.
Будем считать, что в момент времени t
= 1
с угол поворота
![]() имеет такое значение, при котором тело
В
располагается в плоскости
имеет такое значение, при котором тело
В
располагается в плоскости
![]() (рис. 2.20).
(рис. 2.20).
Точка М совершает сложное движение, состоящее из относительного (движение точки по желобу) и переносного (вращение точки вместе с пластиной вокруг оси АС) движений.
В
Рис.
2.20
![]() .
.
Относительная
скорость
![]() .
Найдем положение точки М
на
пластине В
через 1с.
Для этого вычислим значение дуговой
координаты
.
Найдем положение точки М
на
пластине В
через 1с.
Для этого вычислим значение дуговой
координаты
![]() при
при
![]() :
:


Если
обозначить угол, на который опирается
дуга ОМ,
через
(рис. 2.20), то
![]() .
.
Относительное
движение точки задано естественным
способом. Приведем оси
![]() к
точке М
на траектории. Относительная скорость
точки
М
при
к
точке М
на траектории. Относительная скорость
точки
М
при
![]()

Вектор
относительной скорости
![]() лежит в соприкасающейся плоскости
относительного движения – плоскость
и
направлена по касательной к траектории
относительного движения – по оси
(рис.
2.21, а).
лежит в соприкасающейся плоскости
относительного движения – плоскость
и
направлена по касательной к траектории
относительного движения – по оси
(рис.
2.21, а).

а б
Рис. 2.21
Переносная
скорость
.
В переносном движении точка движется
в соприкасающейся плоскости переносного
движения, параллельной плоскости
![]() ,
по окружности радиусом
,
по окружности радиусом
![]() (рис. 2.21, б).
(рис. 2.21, б).
Задано
уравнение вращения пластины В:
![]() ,
тогда
,
тогда

Переносное
движение ускоренное, т. к.
>0,
![]() >0,
дуговые стрелки
и
>0,
дуговые стрелки
и
![]() направлены в одну сторону (рис. 2.21, б).
Приведем оси
направлены в одну сторону (рис. 2.21, б).
Приведем оси
![]() к
точке М.
к
точке М.
Вычислим
радиус кривизны траектории при переносном
движении точки М
в момент времени
(![]() ):
):
=R
−![]() = R(1−
cos)
= 30(1
– cos(
= R(1−
cos)
= 30(1
– cos(![]() ))
= 30(1
– 0,707) = 8,79 см.
))
= 30(1
– 0,707) = 8,79 см.
Переносная скорость Vе
![]() .
.
Вектор
переносной скорости
направлен
по касательной к траектории в точке М
– ось
![]() (рис.
2.21, б).
Направление оси
согласуется с направлением дуговой
стрелки
.
(рис.
2.21, б).
Направление оси
согласуется с направлением дуговой
стрелки
.
Так
как в данном случае векторы
![]() взаимно перпендикулярны (вектор скорости
расположен в плоскости
взаимно перпендикулярны (вектор скорости
расположен в плоскости
![]() ,
вектор скорости
,
вектор скорости
![]() направлен по оси
направлен по оси
![]() ,
т.е.
,
т.е.![]() ),
то модуль абсолютной скорости точки М:
),
то модуль абсолютной скорости точки М:
![]() .
.
Вычислим абсолютное ускорение точки М. Абсолютное ускорение точки равно геометрической сумме относительного, переносного и Кориолисова ускорений
![]() .
.
Относительное
ускорение
![]() .
Относительное движение точки задано
естественным способом – точка
движется
по окружности радиусом
.
Относительное движение точки задано
естественным способом – точка
движется
по окружности радиусом
![]() в
соприкасающейся плоскости относительного
движения
.
Приведем к точке
оси
естественного трехгранника
в
соприкасающейся плоскости относительного
движения
.
Приведем к точке
оси
естественного трехгранника
![]() (рис 2.22, а).
Ось
совпадает с направлением
,
ось
перпендикулярна
оси
и направлена вовнутрь вогнутости
траектории по радиусу
(рис 2.22, а).
Ось
совпадает с направлением
,
ось
перпендикулярна
оси
и направлена вовнутрь вогнутости
траектории по радиусу
![]() .
.
Относительное ускорение равно
![]()
Здесь, при t = 1 с:

 .
.
Точка
движется
с замедлением, поскольку векторы
![]() >0,
>0,
![]() <0,
вектор
и
вектор
<0,
вектор
и
вектор
![]() имеют
разное направление по оси
имеют
разное направление по оси
![]() .
Векторы
и
.
Векторы
и
![]() направлены по осям
и
соответственно и лежат в плоскости
.
направлены по осям
и
соответственно и лежат в плоскости
.

а б
Рис. 2.22
Переносное
ускорение
![]() .
Движение
точки в ее переносном движении
криволинейное. Точка движется по
окружности радиусом
в
соприкасающейся плоскости переносного
движения, параллельной плоскости
.
Движение
точки в ее переносном движении
криволинейное. Точка движется по
окружности радиусом
в
соприкасающейся плоскости переносного
движения, параллельной плоскости
![]() .
Приведем к точке
оси
естественного трехгранника
.
Приведем к точке
оси
естественного трехгранника
![]() (рис 2.22, б).
Ось
совпадает с направлением
,
ось
(рис 2.22, б).
Ось
совпадает с направлением
,
ось
![]() перпендикулярно
оси
и направлена вовнутрь вогнутости, т. е.
по радиусу МК.
перпендикулярно
оси
и направлена вовнутрь вогнутости, т. е.
по радиусу МК.
Переносное ускорение, рис. 2.22, б:
![]() .
.
Здесь при t = 1 с:

Векторы
![]() и
и
![]() направлены по осям
и
направлены по осям
и
![]() соответственно.
соответственно.

а б
Рис. 2.23
Ускорение Кориолиса . Вектор ускорения Кориолиса
,
его модуль
![]() .
.
Вектор
направлен по оси вращения АС.
Угол между векторами
и
равен
![]() (=135о)
(рис. 2.23, а).
(=135о)
(рис. 2.23, а).
Итак,

Направление
вектора
по правилу Журавского: поворачиваем
![]() на 90
по направлению дуговой стрелки
вектор
на 90
по направлению дуговой стрелки
вектор
![]() направлен параллельно оси
(рис. 2.23, б).
направлен параллельно оси
(рис. 2.23, б).
Для
вычисления модуля абсолютного ускорения
используем способ проекций. Спроецируем
все составляющие абсолютного ускорения
на оси
![]() .
Имеем (рис 2.22 и рис. 2.23, б):
.
Имеем (рис 2.22 и рис. 2.23, б):

|
Модуль абсолютного ускорения (рис. 2.24):
Направление
вектора
определим
геометрически. Совместим с точкой
декартову
систему координат
Ответ:
|
Рис. 2.24 |

