

1.3. Основные уравнения строительной механики
Математическая сторона основной задачи строительной механики основана на зависимостях, полученных в сопромате. Напомним их на примере напряженно-деформированного состояния элемента рамы, для которого – в отличие от балки – поперечный изгиб сопровождается дополнительным растяжением или сжатием.
Пусть такой элемент длиной dx расположен в локальной системе координат Oxy, где ось Ox направлена по оси стержня, и загружен распределенной нагрузкой интенсивностью qx и qy вдоль Ox и Oy соответственно (рис. 1.20).
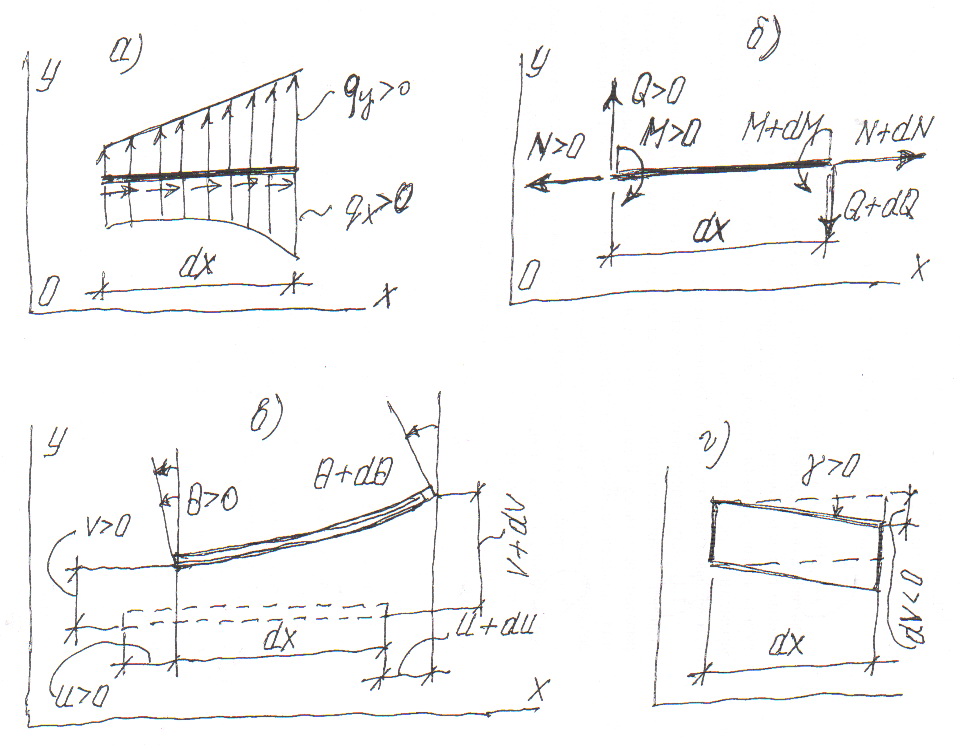
Рис.1.20
Напряженно-деформированное состояние стержня определяется девятью компонентами:
– внутренними усилиями (M, Q, N,);
– перемещениями (u, v, );
– деформациями (κ, , ).
Уравнения для определения этих функций можно разделить на три группы:
Статические уравнения – связывают внутренние усилия (рис. 1.20, б) с заданной нагрузкой:
dN/dx = – qx;
dQ/dx = qy; ý (1.10)
dM/dx = Q .
Геометрические уравнения – выражают деформации через перемещения, показанные на рис. 1.20, б, в:
κ = d/dx;
= dv/dx; (1.11)
= du/dx.
Физические уравнения – представляют собой зависимости между внутренними усилиями и деформациями:
κ = M/EJ;
= Q/GF; (1.12)
= N/EF;
где E – модуль Юнга;
G – модуль сдвига;
F – площадь поперечного сечения стержня;
J – момент его инерции;
– коэффициент, учитывающий неравномерность распределения касательных напряжений в поперечном сечении стержня.
Отметим, что выражения EJ и EF в (1.12) называются жесткостями стержня при изгибе и растяжении (сжатии) соответственно.
При решении системы уравнений (1.10) – (1.12) возможны два варианта:
1) внутренние усилия M, Q, N, удается найти из системы уравнений (1.10), не обращаясь к остальным уравнениям – это СОС;
2) внутренние усилия можно найти только путем совместного решения всех девяти уравнений – это СНС.
В последнем случае при решении этих уравнений возможны два подхода:
– в качестве основных неизвестных выбирают усилия M, Q, N, выражая все остальные через них – это решение в форме метода сил;
– в качестве основных неизвестных выбирают перемещения u, v, – это решение в форме метода перемещений.
Системы, описываемые линейными уравнениями (1.10) (1.12), называются линейно деформируемыми. Для них справедлив принцип суперпозиции, в соответствии с которым:
Внутренние усилия, перемещения и деформации от заданной нагрузки (или иного воздействия) можно найти как сумму соответствующих величин от каждой нагрузки в отдельности.
Примечания:
1. Первое из статических уравнений (1.10) получается из условия равновесия рассматриваемого элемента рамы. Полагая в его пределах qx = const, и составляя уравнение X = 0, получим:
– N + qxdx + (N +dN) = 0,
откуда и следует искомая зависимость. Два других уравнения из (1.10) – это дифференциальные зависимости Журавского.
2. Первое из физических уравнений (1.12) представляет собой дифференциальное уравнение изогнутой оси балки:
κ = d/dx = d 2v/dx 2 = M /EJ.
Второе уравнение в предпосылке равномерного распределения касательных напряжений в поперечном сечении стержня ( =1) выражает закон Гука при сдвиге:
= Q/F = G.
При этом мы не уточняем смысл коэффициента по причине, которая будет указана в § 3.5. Последнее из физических уравнений (1.12) – это закон Гука при ЦРС:
= N/F = E.
3. В дальнейшем, если не будет оговорено особо, мы будет по-прежнему применять обозначение Oxy для глобальной системы координат, связанной с конструкцией в целом.