

4.6. Расчет симметричных систем
При расчете симметричных систем можно упростить структуру системы канонических уравнений за счет обращения в ноль как коэффициентов dij, так и свободных членов Dip0.
В первом случае соответствующий прием носит название группировки неизвестных, во втором – результат достигается с помощью разложения нагрузки на симметричную и обратносимметричную.
Группировка неизвестных применяется для рам, у которых реакции лишних связей представлены только симметричными неизвестными. Примером служит рама на рис. 4.10, а для выбранной на рис. 4.10, б основной системы, где в канонических уравнениях:
d11 X1 + d12 X2 + D1p0 = 0;
d21 X1 + d22 X2 + D2p0 = 0;
все коэффициенты отличны от нуля.
Чтобы упростить эту систему, перейдем от неизвестных X1 и X2 к новым неизвестным X1 и X2 по формулам:
X1¢ = (X1 + X2)/2; (4.12)
X2¢ = (X1 - X2)/2;
где обратное преобразование:
X1 = X1¢+ X2¢; (4.13)
X2 = X1 X2;
имеет наглядный смысл. При этом неизвестные X1 и X2 соответствуют новой основной системе (рис. 4.10, в), для которой эпюры`M10 и`M20 ортогональны (рис. 4.10, г, д), а d12 = 0, поэтому соответствующая система канонических уравнений распадается на два независимых уравнения:
d11 X1 + D1p0 = 0,
d22 X2 + D2p0 = 0.
Определив групповые или обобщенные неизвестные X1и X2, можно с помощью (4.13) вернуться к старым переменным X1 и X2.
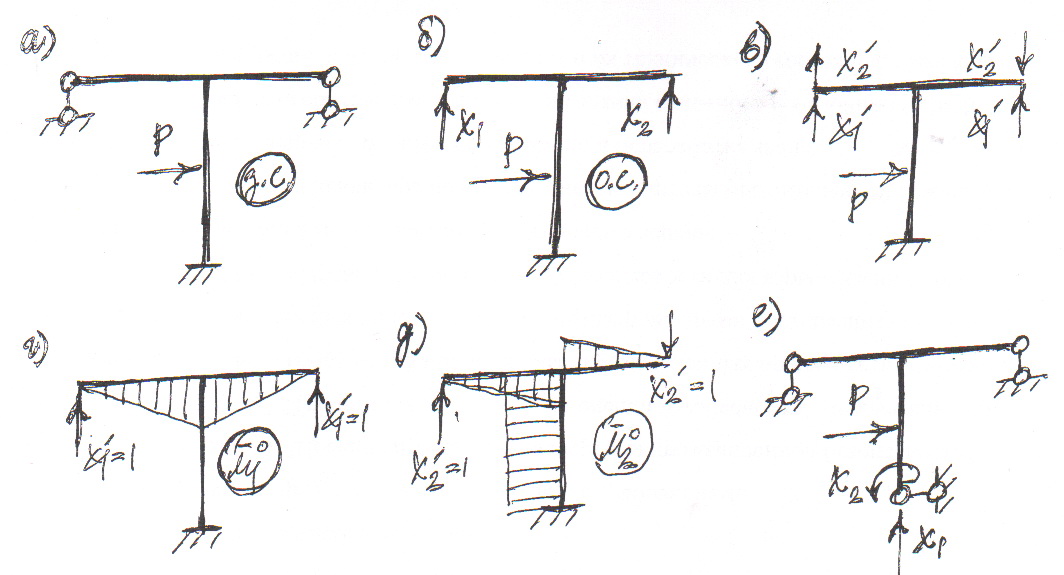
Рис.4.10
Разложение нагрузки на симметричную и обратносимметричную рассмотрим на следующем примере (рис. 4.11, а), где в соответствии с принципом суперпозиции в такой форме представлена заданная нагрузка (рис. 4.11, б, в). Для выбранной основной системы (рис. 4.11, г) d12 = 0 и расчет от симметричной нагрузки приводит к системе канонических уравнений:
d11 X1(1) + D1p0(1) = 0, (4.14)
d22 X2(1) = 0.
При этом D2p0(1) = (`M20´ Mp0(1)) = 0 в силу ортогональности обратносимметричной эпюры `M20 и симметричной эпюры Mp0(1) от первого загружения (рис. 4.11, б). Поэтому решением (4.14) будет X1(1) 0, X2(1) = 0.
Расчет рамы от второго варианта загружения (рис. 4.11, в) приводит к системе канонических уравнений:
d11 X1(2) = 0; (4.15)
d22 X2(2) + D2p0(2) = 0,
так как в этом случае равен нулю свободный член D1p0(2) = (`M10´ Mp0(2)). Ее решением будет X1(2) = 0, X2(2) 0.
Искомые реакции от заданной первоначальной нагрузки равны сумме соответствующих реакций от каждого варианта загружения:
X1 = X1(1) + X1(2) = X1(1); (4.16)
X2 = X2(1) + X2(2) = X2(2).
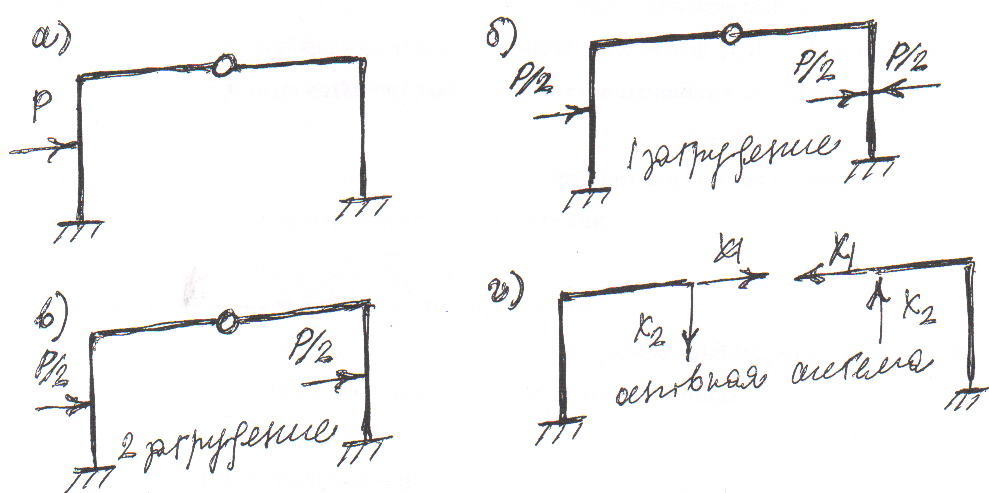
Рис.4.11
Полученный результат можно сформулировать в виде следующей теоремы:
Теорема. В симметричных системах, загруженных симметричной нагрузкой, обратносимметричные неизвестные равны нулю и, наоборот – в симметричных системах, загруженных обратносимметричной нагрузкой равны нулю симметричные неизвестные.
Примечания:
1. Очевидно, что суть рассмотренных методов одинакова: в первом случае суммой симметричных и обратносиметричных сил представляют реакции, во втором – приложенную нагрузку.
2. Рассмотренные приемы расчета удобны для сравнительно простых систем с небольшим числом неизвестных, когда они имеют наглядную интерпретацию. Однако такая идея симметризации неизвестных может быть обобщена на решение произвольных систем алгебраических уравнений.
3. Пример рамы на рис. 4.10, б носит иллюстративный характер – в данном случае решение можно было упростить за счет выбора рациональной основной системы (рис. 4.10, е), для которой d12 = (`M10´`M20) = 0. Отметим, что основная система при этом остается несимметричной.