

36. Определение нагрузок в элементах рулевого управления (рулевой вал, червячный рулевой механизм, вал рулевой сошки, рулевая сошка, тяги трапеции).
Нагрузку можно
определить двумя способами: 1. Задаемся
расчетным усилием на рулевую колонку:
Легк.авт. Ррк=400(Н); Груз.авто. Ррк=700(Н).
2. Определяем усилия на рул.колесе по
мах. сопротивлению повороту управляемых
колес на месте. Момент сопр-ю колес
повороту определяется по эмперической
формуле:
![]() ;
;
φо
– коэфициент сцепления при повороте
колес на месте. φо
=0,9-1,0 Gk-
нагрузка на управляемое колесо. Рш –
давление воздуха в шинах. Зная величину
момента сопротивления, определим усилие
на рулевом колесе:
![]() ;
Если усилие
на рулевом колесе окажется больше
допустимого, то требуется применение
рулевого усилителя. На основании
заданного или вычисленного усилия на
Р.К. определяются нагрузки на всех
деталях рулевого управления:
;
Если усилие
на рулевом колесе окажется больше
допустимого, то требуется применение
рулевого усилителя. На основании
заданного или вычисленного усилия на
Р.К. определяются нагрузки на всех
деталях рулевого управления:
Рулевой вал: - нагружается моментом. Мр.в.=Рр.к.·Rр.к. и испытывает напряжение кручения.
![]() ;
Сплошной
вал:
;
Сплошной
вал:
![]() ;
Полый вал:
;
Полый вал:
![]() ;
;
![]()
![]()
![]()
![]()
![]() на
1 м. длины.
на
1 м. длины.
2. Рулевой механизм: (глабоидный червяк и ролик)
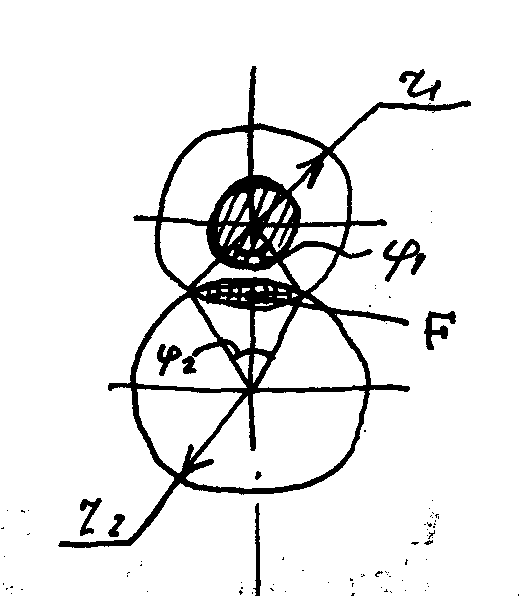
Определяют
контактные напряжения в зацеплении:
Рх – осевое усилие на червяк. F
– площадь контакта 1-го гребня ролика
с червяком. τWo-
начальный радиус червяка в горловом
сечении. β – угол подъема винтовой
линии червяка.
![]()
![]()
![]() Материал
червяка: Ст30Х;35Х;40Х;40ХН; Ролик: Ст
15ХН;12ХН3А;
Материал
червяка: Ст30Х;35Х;40Х;40ХН; Ролик: Ст
15ХН;12ХН3А;
![]()
3. Вал рулевой сошки: Нагружен крутящим моментом и расчитывается на кручение:
![]() ;
;
![]() При наличии
ГУР управления:
При наличии
ГУР управления:
![]() ;
Ст.30,18ХГТ,20ХН3А
;
Ст.30,18ХГТ,20ХН3А
4. Рулевая сошка: - подвергается изгибу и кручению, расчет ведётся на сложное напряжение. Шлицы рассчитываются на срез.
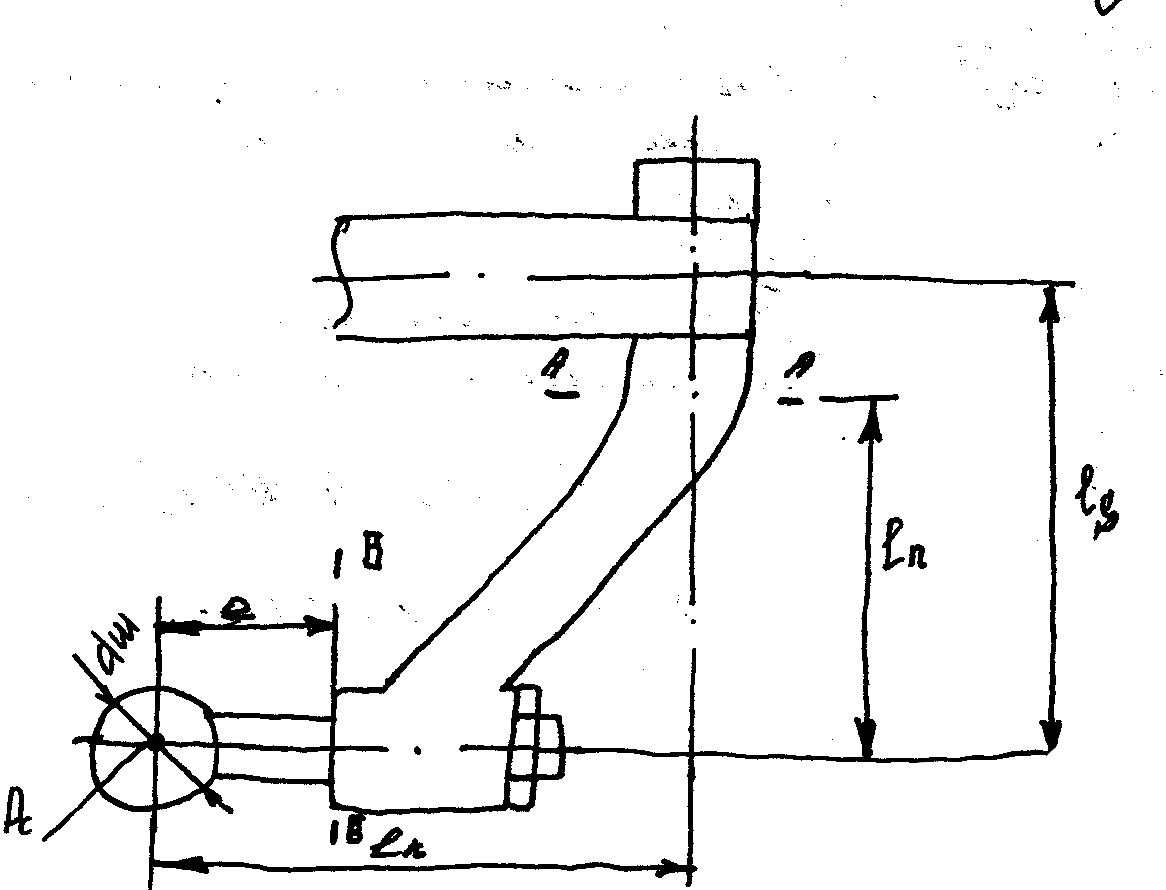
Усилие на шаровом
пальце сошки вызывающее изгиб и кручение
при наличии усилителя:
![]() ;
Определяем
напряжение изгиба и кручения в опасном
сечении А-А:
;
Определяем
напряжение изгиба и кручения в опасном
сечении А-А:
![]()
![]()
![]()
![]() Сталь
30,18ХГТ.
Сталь
30,18ХГТ.
5. Шаровой
палец сошки:
![]() Сталь
40Х;20ХГТ
Сталь
40Х;20ХГТ
![]() Для шарового
пальца (самого шара) определяется
напряжение смятия, по величине которого
судят об износоустойчивости:
Для шарового
пальца (самого шара) определяется
напряжение смятия, по величине которого
судят об износоустойчивости:
![]()
dШ
– диаметр
шара.
![]()
6. Продольная тяга:
Определение
критической силы: Критическая сила –
это та, при приложении которой к стержню
последняя не вернется в исходное
состояние. Для стержней постоянного
сечения с шарнирно закрепленными
концами, критическая сила определяется
по формуле Эйлера:
![]() Запас
устойчивости:
Запас
устойчивости:
![]()
Ст.20,35
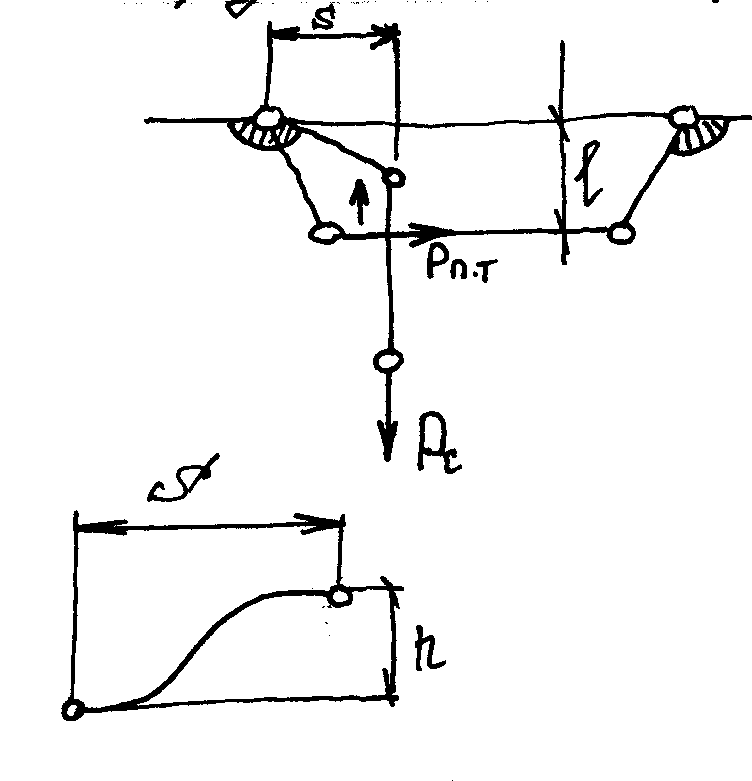
7. Поворотный рычаг: Испытывает напряжение изгиба на плече S и кручение на плече n:
![]()
![]()
8. Боковые рычаги: Испытывают напряжение под действием силы Рп.т.(поперечной тяги)
![]()
9. Поперечная тяга: Нагружается силой Рп.т. рассчитывается по той же методике, что и продольная.
37. Расчетные режимы полуосей
В зависимости от испытываемых полуосью нагрузок, их условно делят: 1. Полуразгруженные. 2. На ¾ разгруженные. 3. Полностью разгруженные.
1. Полуось воспринимает все усилия и моменты, действующие от дороги. Область применения: легковые автомобили.
2. Полуось разгруженная на 3/4 имеетвнешнюю опору между ступицей и балкой моста, поэтому изгибающие моменты от реакций Rz, Pт, Ry воспринимает одновременно и полуось и балка через подшипники. Применение: легковые автомобили высокого класса.
3. Полностью разгруженные полуоси: Теоретически полуось передает только крутящий момент. Применяется: Грузовые автомобили.
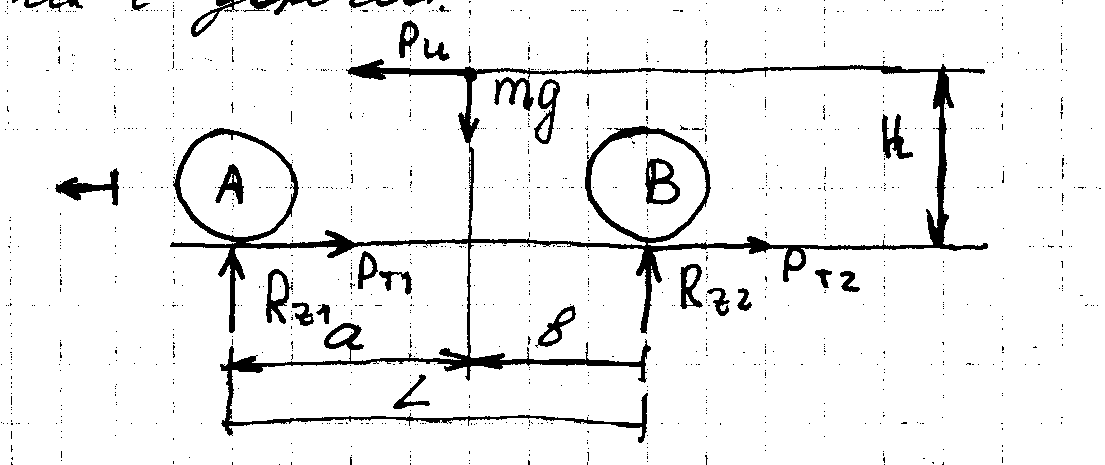
Расчетный режим полуосей: Переразгруженная полуось расчитывается на изгиб и кручение для 3-х случаев нагружения: 1 . Прямолинейное движение: Ry=0; Rz=?; Рт=?
Rz
– нормальная реакция опорной поверхности
от ведомого моста. Rz’’
– вертикальная нагрузка она полуось.
![]()
![]() gk
– вес колеса. m2
– коэффициент перераспределения масс.;
m2=
1,1-1,2
gk
– вес колеса. m2
– коэффициент перераспределения масс.;
m2=
1,1-1,2
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Занос:
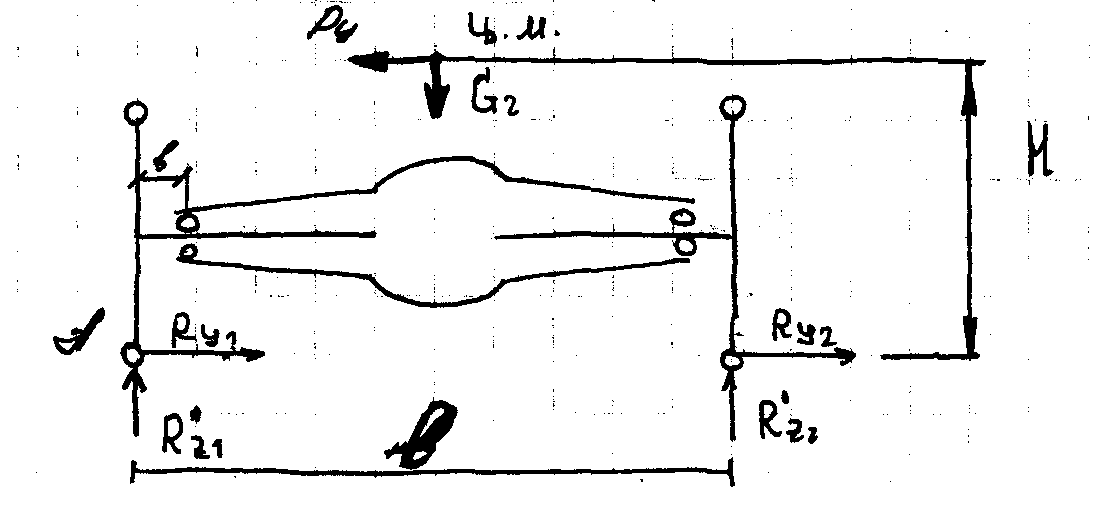
Pт=0;
Σма=0;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Динамическое нагружение.
Поп. и прод. усилие в пятне контакта колеса отсутствует.
Действует вертикальная нагрузка.
![]()
39. Регуляторы тормозных сил. Основные элементы и принципы работы АБС.
Назначение:
Ограничение тормозных сил на задних
колесах автомобиля для предотвращения
их блокировки и возможного заноса. По
расчетной схеме определяем мах.
тормозные силы на колесах передней и
задней оси по условию сцепления их с
дорогой.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
Оптимальное
распределение тормозных сил между
передними и задними колесами по условию
сцепления их с дорогой можно определить
по выражению:
;
Оптимальное
распределение тормозных сил между
передними и задними колесами по условию
сцепления их с дорогой можно определить
по выражению:
![]() ;
;

При отсутствии регулятора, в значительном диапазоне наблюдается перетормаживание задних колес, особенно для незагруженного автомобиля, что может привести к заносу.
Регуляторы тормозных сил делят на 2 группы: Статические и Динамические. Статические – ограничивают давление в контуре привода задних колес в зависимости от командного давления( давления в главном тормозном цилиндре). Динамические – ограничивают давление в контуре привода задних колес в зависимости от изменения нагрузки задних колес. Статические регуляторы бывают: С отсечным клапаном, С пропорциональным клапаном. Динамические регуляторы: С отсечным клапаном, С пропорциональным. Также существует ещё и Лучевой регулятор – пердназначен для тормозного пневмопривода. Применение регуляторов тормозных сил связано с потерей тормозной эфективности автомобиля на 10-15% за счет недотормаждивания задних колес.
АБС
предназначены для облегчения оптимальной
тормозной эффективности, сохранения
устойчиворсти и управляемости
автомобиля.Помимо омеченных недогстатков
регуляторов тормозных сил, они еще не
способны реагировать на изменение
величины сцепления колеса с дорогой.
Коэфициент сцепления определяется как
отношение тормозной силы к олеса к его
вертикальной реакции.
![]() ;
;
АБС поддерживает в процессе торможения относительное проскальзывание колес в узких пределах вблизи S=0,2. Независимо от конструкции любая АБС должна включать следующие элементы: 1. Датчики – они дают информацию об угловой скорости колеса, давлении рабочего тела в приводе, замедления и скорости автомобиля. 2. Блок управления- обрабатывает полученную информацию и управляет исполняющими механизмами. 3. Исполнительные механизмы – (модуляторы давления) – регулируют давление в тормозном приводе колес.Тормозная динамика автомобиля с АБС зависит от схемы установки элементов АБС. С точки зрения тормозной эффективноси, наилучшей является схема с автономным регулированием каждого колеса (4-х канальная АБС). На каждом колесе имеется датчик, модулятор давления и блока управления. Эта схема наиболее сложна и дорогостояща.