

Вопрос № 31 суэп с ос по частоте вращения двигателя.
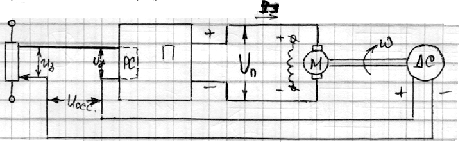
В качестве датчика скорости м.б. использован тахогенератор. В общем случае входным каскадом преобразователя П служит промежуточный усилитель-регулятор скорости РС. Допуская, что характеристика «вход-выход» преобразователя линейна и однозначна и, полагая Ф=фн=const запишем исходные уравнения:
Uуkп=(UЗ-UОСС)kП=EП
UОСС=kсω
EП=IЯRЯ+ω/kД
, где
![]() коэффициент ООС по скорости.
коэффициент ООС по скорости.
Решив совместно уравнения, получим уравнение статической скорости хар-ки:
![]() ,
,
где
![]() -
передаточный коэффициент двигателя;
-
передаточный коэффициент двигателя;
![]() -
скорость идеального х.х. в замкнутой
системе;
-
скорость идеального х.х. в замкнутой
системе;
![]() - перепад скорости в этой системе.
- перепад скорости в этой системе.
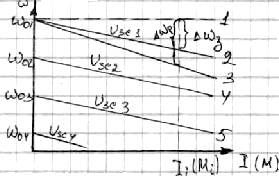
Т.о. при замыкании системы ООС по скорости жесткость статической характеристики повышается по сравнению с разомкнутой системой в (1+kc kП kД ) раз.
Прямая 3- хар-ки ДПТ в разомкнутой, 2- замкнутой системах). Прямые 4 и 5 - хар-ки замкнутой системы при меньших значениях задающего сигнала (4 и 5 II 2).
При
![]()
![]() ,
,
![]() ,
т.е. в пределе данной замкнутой системы
м.б. получена абсолютно жесткая
характеристика. (штрих. линия 1). (на
практике абс. жесткая мех. х-ка не
реализуется из-за ухудшения динамики
ЭП).
,
т.е. в пределе данной замкнутой системы
м.б. получена абсолютно жесткая
характеристика. (штрих. линия 1). (на
практике абс. жесткая мех. х-ка не
реализуется из-за ухудшения динамики
ЭП).
Физ. сторона процесса регулирования скорости:
При
![]()
![]() ;
;
![]() ;
ЭДС преобразователя
;
ЭДС преобразователя
![]() ,
,
![]() .
.
При
![]() ;ОС
действует в другом направлении, т.е.
ЭДС преобразователя
;ОС
действует в другом направлении, т.е.
ЭДС преобразователя
![]() ,
,
![]() .
.
В случае двухзонного регулирования в зоне работы с ослабленным Ф<Фн необходимо при Uз.max=const изменять kc=kco, так, чтобы сохранялось постоянство произведения kсokдо=kckд. При этом относительный перепад скорости Sкз остается тем же, что и на верхней статической хар-ке при Uз.max в зоне Ф=ФН..
Вопрос № 32
Определить передаточную функцию системы ТП-Д без ОС а)без учета ЭДС двигателя; б)при учете ЭДС двигателя

а) без ОС по ЭДС:
перемножаем все передаточные функции
б) с ОС по ЭДС
преобразуем
сокращаем

перемножаем все передаточные функции
Вопрос № 33
Найти передаточную функцию по управлению и возмущению системы ТП-Д с ОС по скорости, настройка регулятора на СО.
Δетп
ΔUу
Δω
ΔМ
α α
Δеф
Δnc
ΔUдс
 Сд'= CД · ФН
- Приведённая пост двигателя
Сд'= CД · ФН
- Приведённая пост двигателя
![]() Передаточная функция по возмущению
Передаточная функция по возмущению
Передаточная ф-ция по управлению:
 где Т1, Т2 – Корни
характеристического уравнения.
где Т1, Т2 – Корни
характеристического уравнения.
Настройка на симметричный оптимум (со). Найдём перед. функцию разомкнутой системы.
 компенсируем Т1 и Т2
компенсируем Т1 и Т2
 далее определим передаточную ф–ю
замкнутой системы.
далее определим передаточную ф–ю
замкнутой системы.

Настройка
контура регулирования на симметричный
оптимум предполагает получение
оптимизированной передаточной функции
разомкнутого контура в виде:
![]()
Для объекта регулирования обладающего астатизмом первого порядка является точным выражением полученной в результате оптимизации передаточной функции разомкнутого контура, а для статического объекта может приближенно выражать эту передаточную функцию в области средних частот. Настройка на СО увеличивает динамичность регулирования, однако наличие в низко частотной части участка с наклоном - 40Дб/дек приводит к существенному увеличению перерегулирования:
