

Вопрос № 18 Виды коммутации электрических машин
С лучай
когда Σе=0. При этом в секции действет
только основной ток коммутции.Изменение
тока секции I
определяется только изменением rщ1
и rщ2, вследствие чего этот
случай наз-ся коммутцией сопротивления.
лучай
когда Σе=0. При этом в секции действет
только основной ток коммутции.Изменение
тока секции I
определяется только изменением rщ1
и rщ2, вследствие чего этот
случай наз-ся коммутцией сопротивления.
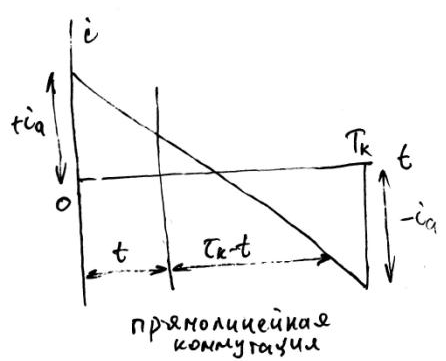
Т акую
коммутацию наз-т прямолинейной.Плотность
тока под всеё щёткой на протяжении всего
времени коммутации неизменна, как если
бы щётки находились на сплошном
вращающемся контактном кольце,а не не
коллекторе. Такой случай коммутции
поэтому явл-ся теорически идеальным.
акую
коммутацию наз-т прямолинейной.Плотность
тока под всеё щёткой на протяжении всего
времени коммутации неизменна, как если
бы щётки находились на сплошном
вращающемся контактном кольце,а не не
коллекторе. Такой случай коммутции
поэтому явл-ся теорически идеальным.
В![]() общем случае Σе не равна0 , на основной
ток коммутции накладывается ток,
опред.При Σе>0 ток iк.д.
складываектся с основноым током коммут.,
кот.принять линейным. При этом пол-ся
случай так наз-ой замедленной коммутции,
когда изменения тока I в
начале коммутции происходит медленно
и ускоряется к концу. При замедленной
коммутацией возникают благоприятные
условия для искрения под сбегающим
краем щётки. При Σе>0 ток iк.д.
имеет обратный знак.Ускоренная. Ток на
сбегающем краю щётки уже в начале
коммутции, когда этот край щётки подобно
рубильнику замыкает цепь короткозамкнутой
секции, становятся большими. При этом
сущ-ет некоторая тенденция к искрению
под набегающем краем щётки.
общем случае Σе не равна0 , на основной
ток коммутции накладывается ток,
опред.При Σе>0 ток iк.д.
складываектся с основноым током коммут.,
кот.принять линейным. При этом пол-ся
случай так наз-ой замедленной коммутции,
когда изменения тока I в
начале коммутции происходит медленно
и ускоряется к концу. При замедленной
коммутацией возникают благоприятные
условия для искрения под сбегающим
краем щётки. При Σе>0 ток iк.д.
имеет обратный знак.Ускоренная. Ток на
сбегающем краю щётки уже в начале
коммутции, когда этот край щётки подобно
рубильнику замыкает цепь короткозамкнутой
секции, становятся большими. При этом
сущ-ет некоторая тенденция к искрению
под набегающем краем щётки.
О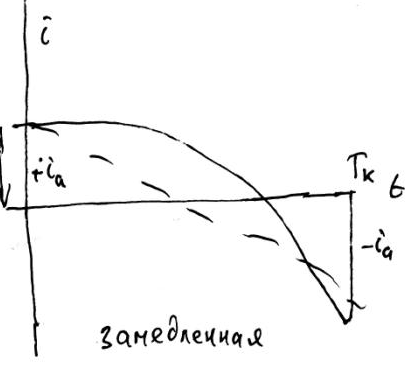 днако
сильного
искрения
обычно не наблюдается. В конце же
процесса ускоренной коммутации,
а
также
плотность
тока
jщ1,на
сбегающем краю щетки могут быть
малы или даже практически равны пулю.
Поэтому размыкание цепи
короткозамкнутой секции сбегающим
краем щетки при такой
ускоренной коммутации происходит в
весьма благоприятных
условиях подобно размыканию рубильником
цепи с малым током.
днако
сильного
искрения
обычно не наблюдается. В конце же
процесса ускоренной коммутации,
а
также
плотность
тока
jщ1,на
сбегающем краю щетки могут быть
малы или даже практически равны пулю.
Поэтому размыкание цепи
короткозамкнутой секции сбегающим
краем щетки при такой
ускоренной коммутации происходит в
весьма благоприятных
условиях подобно размыканию рубильником
цепи с малым током.
П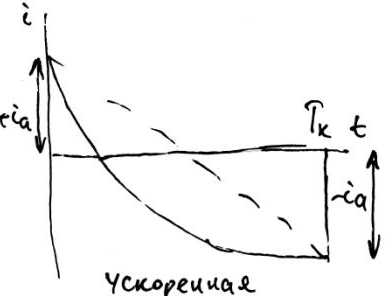 одобная
коммутация, когда ток на сбегающем краю
щетки в
конце
коммутации мал, называется
некоторыми
авторами также коммутацией с малой
ступенью
тока.
Получению такой коммутации способствуют
щетки с круто поднимающейся вольт-амперной
характеристикой когда переходное
сопротивление
щетки при малых плотностях тока велико.
одобная
коммутация, когда ток на сбегающем краю
щетки в
конце
коммутации мал, называется
некоторыми
авторами также коммутацией с малой
ступенью
тока.
Получению такой коммутации способствуют
щетки с круто поднимающейся вольт-амперной
характеристикой когда переходное
сопротивление
щетки при малых плотностях тока велико.
Таким образом, замедленная коммутация является неблагоприятной и нежелательной. Наоборот, слегка ускоренная коммутация благоприятна, и на практике стремятся достичь именно такой коммутации.
Вопрос № 19 (повтор вопроса №2)
Режимы работы электрических машин
Вопрос № 20
Особенности расчета CУЭП в двух- и трехмассовых системах
Для исследования физических особенностей системы трёхмассовая сводится к двухмассовой расчётной схеме.
J1-суммарный момент дв. и жёстко связанных с ним элементов. J2-суммарный момент
инерции элементов жёстко связанных с рабочим механизмом
Когда параметры системы таковы что влияние упругих связей незначительны или ими можно пренебречь, то мех. часть представляется жёстким звеном и многомассовая мех. часть ЭП заменяется 1 эквивалентной массой с экв-м J и на которую воздействуют Мдв и Мн.
Все инерционные массы системы движутся с одинаковой скоростью если полагать что связи между ними абсолютно жёсткие. В действительности например вал дв., муфта, и вентилятор имеют конечную жёсткость и ЭП представляет многомассовую упругую систему. Главными массами в данном случае являются ротор дв. и раб. колесо вентилятора а наименьшей жёсткостью обладает муфта: J1=Jу+Jм1 : J2=JВ+Jм2 результирующая податливость вала величина обратная жёсткости = сумме податливостей отдельных участков схемы.(1/С12=1/С1+1/С2+1/С3). В полученной 2массовой системе сохраняются достаточно правильные представления о фактической скорости р. дв. и раб.колеса вентилятора.
Математическая модель 2массовой системы:
М-Мс1-М12=J1*dw1/dt
M12-MC2=J2*dw2/dt
C12=M12/![]()
3массовая система используется в тех случаях когда возникает необходимость более детального изучения движения масс механизма.
на примере механизма перемещения тележки с грузом рассмотрим систему где выделяем 3 основные массы: ротора, тележки и груза. Остальные массы не существенны, жёсткость же заменим эквивалентной (С12,С23).3массовая система отражает основные особенности движения механизма и мы получаем представление о з.изменения w1,2,3. J1 первая масса- ротор дв.и жёстко связанные с ним элементы. Мс1 –суммарный момент потерь на валу дв.и связанных с ним элементов. К пром.массе J2 приложен Мс2 который есть сумма приведённого Мс движению тележки и приведённых моментов потерь на трение в элементах кинемат-кой цепи. К J3 приложен Мс3 движению этой массы. В общем случае будем полагать что каждый момент может содержать акт.и реакт.составляющие сопротивления движению а также периодическую составляющую нагрузку. Математическая модель:
М-Мс1-М12=J1*dw1/dt
M12-MC2-М23=J2*dw2/dt
М23-Мс3= J3*dw3/dt
М12=С12*(![]() )
)
М23=С23*(![]() )
)