

Вопрос № 15 Переходные процессы при пуске системы г – д
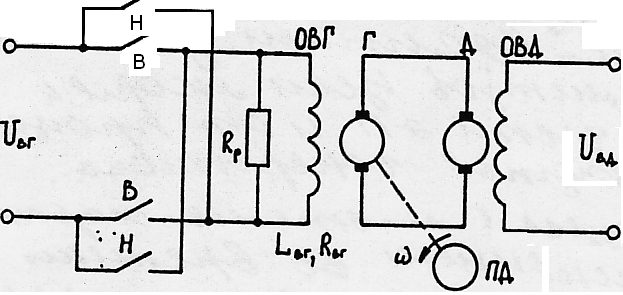
В данной системе 3 электрические машины: генератор (Г), двигатель (Д) и приводной двигатель (ПД). ОВД находится под постоянным нерегулируемым напряжением. ПД приводит в движение Г. Все операции по регулированию и реализации переходных процессов осуществляются со стороны ОВГ, которая обладает очень большой индуктивностью. На схеме RР – разрядный резистор, служащий для разряжения энергии, запасённой в ОВГ.
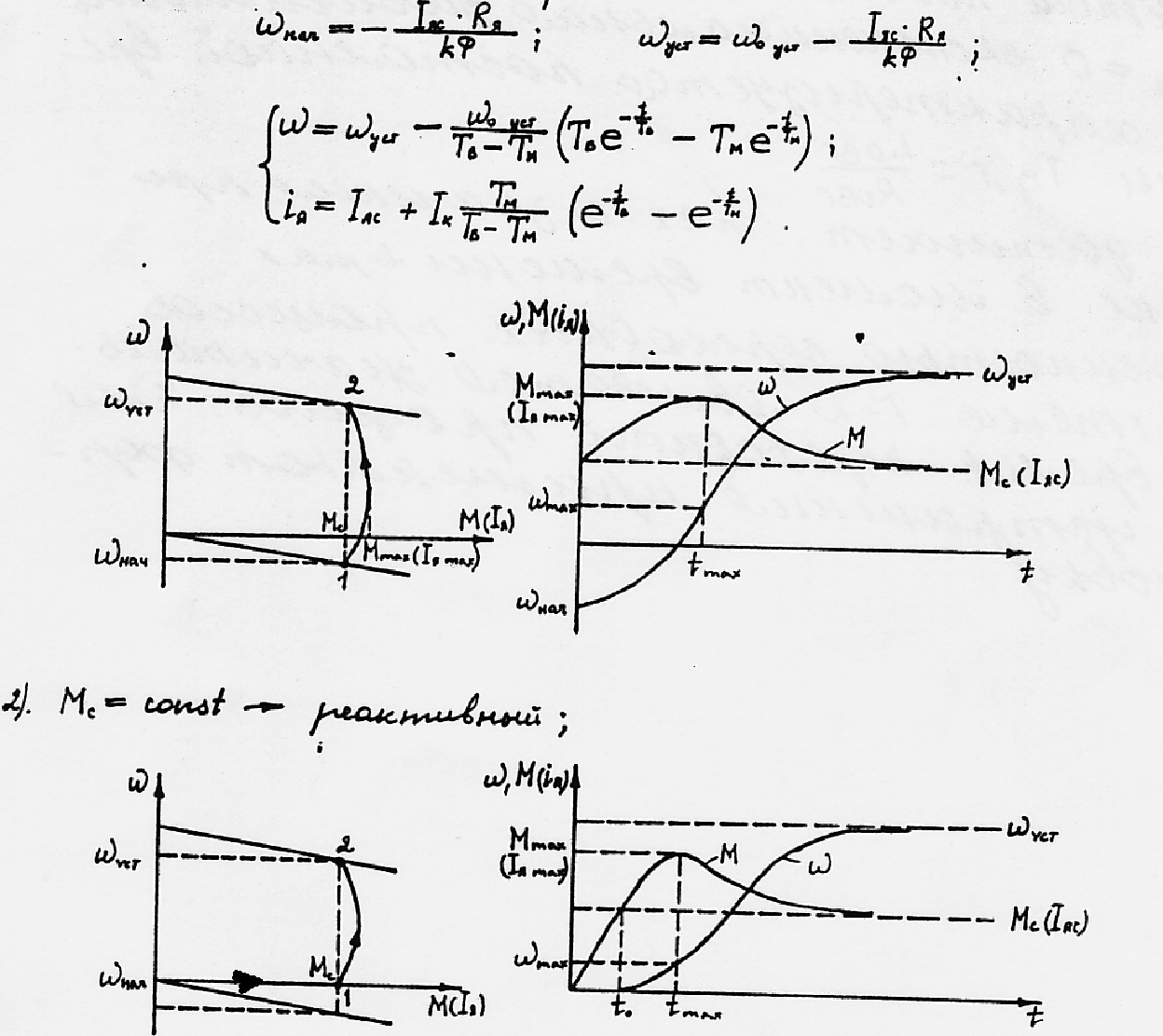
Iяmax=Iяс+Iк*m^(-m/(m-1))
Процессы в цепи ОВГ являются определяющими для ЭП, а процессы изменения остальных его координат I, M, – ведомыми, зависящими от параметров цепи якоря и мех. части ЭП и от процессов в цепи возбуждения генератора. Переходной процесс в системе характеризуется изменением во времени ЭДС генератора Г(t), ЭДС двигателя Д(t). Пуск ЭД после замыкания контактов В (Н) и сопровождается нарастанием I возбуждения и ЭДС генератора по характерному закону. С учётом того, что в начале пуска ЕГ.НАЧ = 0 экспоненциальная зависимость Г(t) характеризуется постоянной времени ТВ.Г = LОВГ/RОВГ. IЯ достигает mах при пуске в момент времени tМАХ. Особенность переходных процессов в системе Г – Д это значительное время перех. процессов, для устранения применяют форсировку.
Вопрос № 16 Переходные процессы при торможении системы г – д
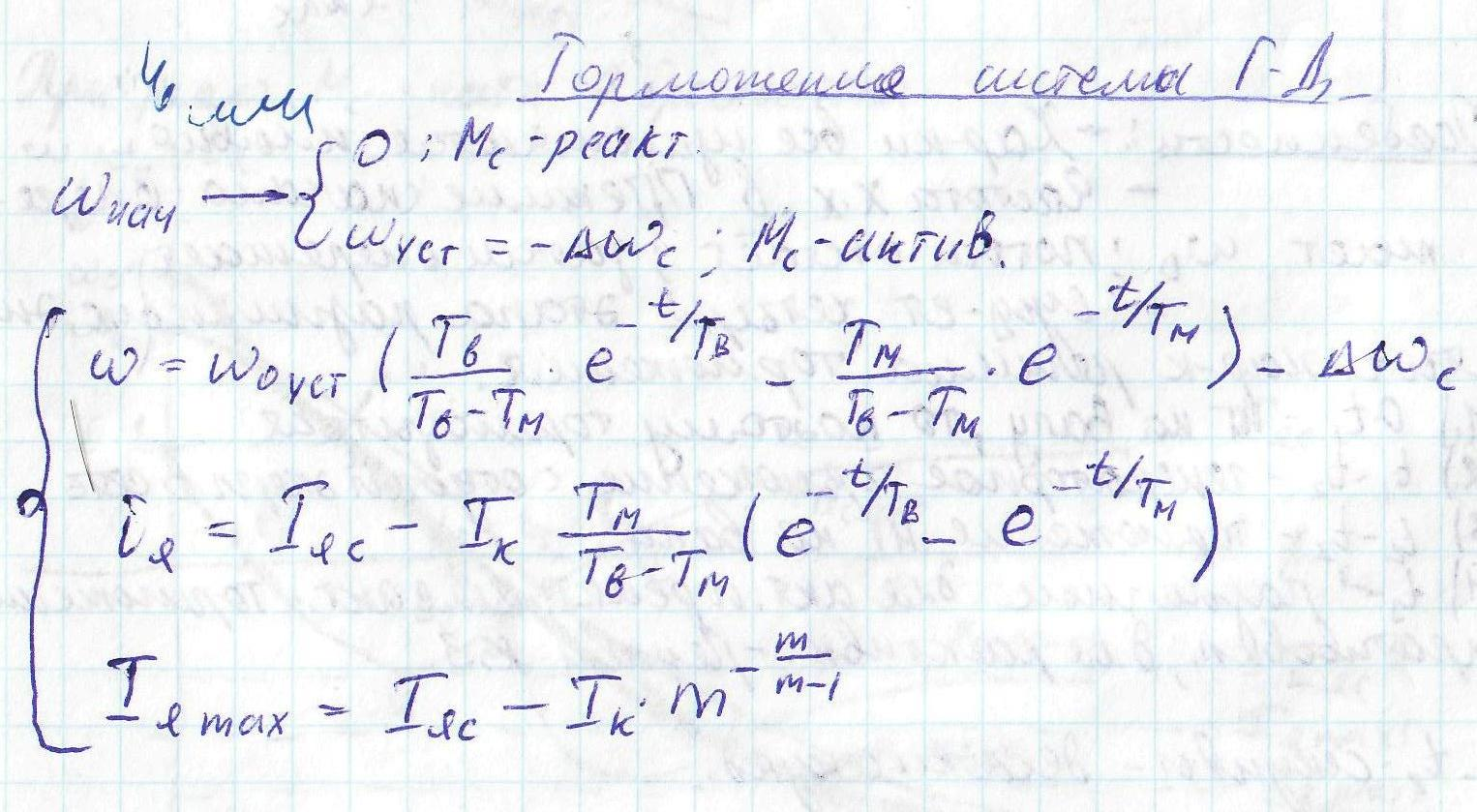
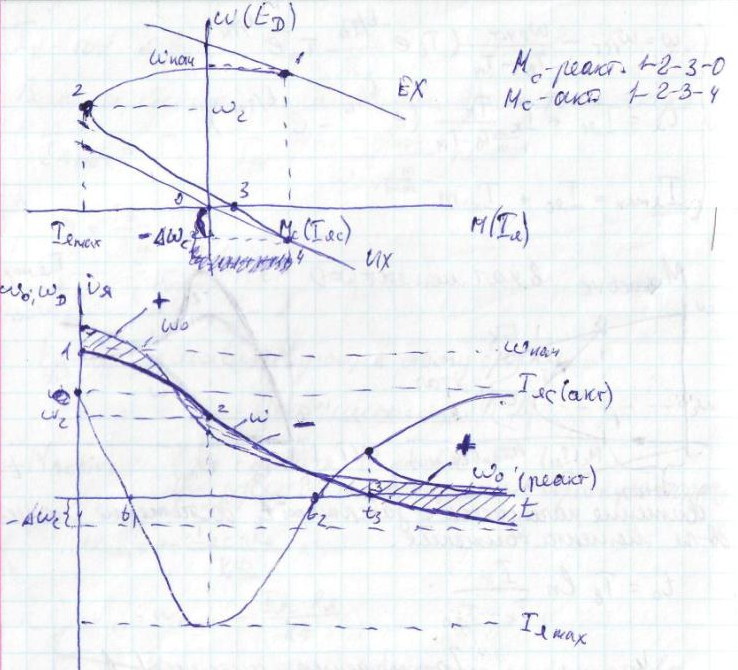
Особенность - Хар-ки все изменяются плавно
- Частота х.х. в П.режиме сначала опережает ωD. Потом отстаёт, затем опережает
- сущ-ет четыре этапа различных энергетич.хар-к режима торможения.
1) 0-t1 – НГ на валу, то поэтому тормозится
2) t1 – t2 – генераторное торможение с отдачей энергии в сеть
3) t2 – t3 – торможение НГ на валу
4) t3 – различные для акт. и реакт. Для акт. –томожение противовкл.,для реакт. – режим К.З.
t1 – t2 секунды – десятки секунд.
Вопрос № 17 Преимущества и недостатки коллекторных машин переменного тока
Коллекторные машины перем.тока
Различные виды коллекторных машин перем.тока используются в основном в качестве двигателей, однако в целом их применение ограничено следующими причинами: трудности коммутации и относит.сложность их устройства. Трудности коммутации ограничивают мощность и диапазон регулирования скорости вращения.
Трехфазные коллекторные двигатели с последоват.возбуждением
(рис.70). Имеют последовательное соединение обмотки статора и обмотки ротора. Обмотка ротора присоединена к коллектору. Фазы обмотки якоря соединены между собой в треугольник, который всегда может быть приведен к эквивалентной звезде. В обмотке ротора индуктируется ЭДС от вращающего поля. Кроме того в цепь ротора вводится добавочное ЭДС или U, т.к. обмотка ротора соединена последовательно с обмоткой статора и U сети распределяется между этими обмотками. Рассматриваемый двигатель развивает вращающий момент в случае, когда угол α не равен 0 и 1800. α- угол между осью фазы обмотки статора и осью соответствующей фазы ротора. Если повернуть щетки из положения х.х. на α = 1800, то получится положение к.з. Положение х.х. (рис.в тетради). МДС F1 и F2, образованные током i, текущим по обмоткам статора и ротора, действуют согласно и результирующая МДС F= F1 +F2. Наоборот, в режиме к.з. F1 и F2 действуют встречно и F= F1 –F2. В первом случае ось потока Фм, создаваемая результирующей МДС F, совпадает с осью МДС ротора F2 . Во втором случае эти оси направлены в противоположные стороны. Поэтому в обоих случаях вращающий момент двигателя =0. Т.к. для создания момента на валу необходимо, чтобы между осями потока Фм и осью МДС ротора F2 был некоторый пространственный угол γ. Чтобы создать этот угол, сдвинем щетки из положения х.х. на угол α в каком-нибудь направлении, н-р по вращению потока Фм . Результирующая МДС двигателя представляет собой геометрич.сумму МДС F1 и F2 . Результирующая F создает поток Фм , сдвинутый относительно МДС F2 на угол γ. Щетки сдвигают против направления вращения поля. В этом случае ротор вращается по направлению поля. При сдвиге щеток по направлению вращения поля ротор будет вращаться против вращения потока. При вращении ротора против поля растут потери в стали. Потери в стали пропорциональны частоте, а вторичная f2= p*(n1+ n). Соответственно увеличивается трансформаторная ЭДС в коммутируемых секциях. Для регулирования скорости вращения двигатель снабжают механизмом поворота щеток. Пуск двигателя осуществляется при α≈ 1600.
Однофазные коллекторные двигатели с последоват.возбуждением
(рис.71). Имеют такое же уст-во и схему соединения обмоток, как и двигатели с последоват.возбуждением пост.тока. С целью уменьшения потерь на вихревые токи сердечник статора собирается из листов эл-техн. стали. Ф,i являются переменными, совпадают по фазе и меняют свой знак одновременно. Будем считать, что Ф и i изменяются во времени синусоидально. i= Im*sinωt , Ф=Фm*sinωt. Т.к. однофазный двигатель представляет собой по существу двигатель пост.тока, питаемый перем.током, то мгновенное значение вращ. момента на валу может быть выражено формулой для момента двигателя пост.тока. Mt=cmФmIa= =cm Фm Imsin2ωt. Значит момент однофазного последоват.двигателя остается положительным за все время периода Т, изменяясь синусоидально за полупериод от 0 до max значения. Mm=cm Фm Im , М пульсирует с двойной частотой сети. Т.к. ротор двигателя обладает значительной механич.инерцией, то скорость его практически постоянна и можно сказать, что двигатель реагирует на среднее значение момента. Обмотка якоря обладает определенным индуктивным сопр-ием Xа, обмотка возбуждения- Xв. X= Xа +Xв- сопр-ие двигателя, r = ra + rв- активное сопр-ие. Ур-ние U для двигателя с последоват.возбуждением перем.тока: U=
=E+rI+jxI, E- ЭДС якоря, которая индуктируется в результате вращения якоря в магн.поле полюсов, и она совпадает по фазе с потоком. В соответствии с ур-нием U построена векторная диаграмма (рис.71). Наличие X вызывает сдвиг фаз φ между U и I. Коэф.мощности cosφ= 0,7-0,9. Причем cosφ тем больше, чем больше скорость вращения двигателя. Механич.хар-ки n= f (M) и скоростная n= f (I) последовательного двигателя перем. и пост.тока имеют одинаковый характер. В коммутируемых секциях обмотки якоря однофазного двигателя индуктируется реактивная ЭДС er и трансформаторная ЭДС eтр. Реактивная ЭДС обусловлена изменением тока в коммутируемой секции. Она пропорциональна скорости вращения n и току якоря i, и совпадает по фазе с этим током. Трансф-ая ЭДС индуктируется вследствие изменения потока полюсов с частотой тока сети. Она пропорциональна этой частоте и потоку полюсов или току якоря, и сдвинута по фазе относительно потока на 900. Трансф-ая ЭДС как и в многофазных коллекторных машинах перем.тока существенно ухудшает условия коммутации по сравнению с двигателями пост.тока. Маломощные двигатели (до 0,5 кВт) с последоват.возбуждением строятся без добавоч.полюсов. И для улучшения их коммутации можно сдвигать щетки с геометрич.нейтрали против вращения якоря. Мощные двигатели с последоват.возбуждением изготавливаются с добавоч.полюсами и компенсационной обмоткой на статоре. Все обмотки двигателя включаются последовательно. Компенсац.обмотка, как и в ДПТ, нужна для компенсации потока р-ии якоря Фа. Применение этой обмотки уменьшает индуктивное сопр-ие двигателя, повышает его коэф.мощности и улучшает условия коммутации. Реактивная ЭДС и трансф-ая ЭДС сдвинуты по фазе на 900 и трансф-ая ЭДС не зависит от скорости вращения. Эти обстоятельства затрудняют компенсацию eтр с помощью добавоч.полюсов. Маломощные однофазные двигатели с последоват.возбуждением находят широкое применение в промышленных и бытовых устройствах, когда требуются большие скорости вращения от 3000 до 30000 об/мин и регулирование скорости вращения. Регулирование скорости вращения этих двигателей производится также, как и у двигателей с последоват.возбуждением пост.тока.
Универсальные коллекторные двигатели
Маломощные двигатели с последоват.возбуждением часто изготавливаются для питания как от сети пост.тока, так и от сети перем.тока. В этом случае их называют универс.двигателями с последоват.возбуждением (рис.72). Обмотка возбуждения делается секционированной с целью изменения числа витков обмотки возбуждения для сближения рабочих хар-к при работе микродвигателя от сетей пост.и перем.тока. Обмотка возбуждения делится на 2 части, включаемые с разных сторон к коллектору. Такое включение называется симметрированием обмоток, что позволяет уменьшить радиопомехи. При питании от сети перем.тока ток якоря и поток возбуждения изменяются во времени синусоидально.
ia= i= Im*sinωt ; Ф=Фм*sin (ωt- γ). Im и Фм- амплитудные значения тока и потока, γ- угол отставания потока от тока под действием потерь в стали и особенно токов в к.з. секциях обмотки якоря, которые электромагнитно связаны с обмоткой возбуждения . Эл-магн. момент двигателя Mt= cmФδIa = cmФmsin (ωt-
-γ)*Imsin ωt = cm*(ФmIm / 2)*(cosγ- cos (2 ωt- γ)). Изменение тока i, магн.потока Ф и вращающего момента М во времени – на рис.72. Момент М остается положительным на отрезке времени, соответствующему углу (π-
-γ) и имеет отриц.значение, соответствующее углу γ. Среднее значение момента на валу двигателя
Мср = 1/π* ∫π0 Mt dt = (cm / π) * ( ФmIm / 2)* ∫π0 (cosγ- cos (2 ωt- γ))*dt= (cm / π)* (ФmI / √2)* cosγ; I- действующее значение тока якоря, Фm – амплитуда основного магн.потока. Хар-ки двигателя при питании от сети перем.тока хуже, чем при питании от сети пост.тока. Причина расхождения хар-к в том, что на перем.токе на величину тока и его фазу существенное влияние оказывают индуктивные сопр-ия обмоток якоря и возбуждения. Это влияние выражается в частности в том, что при работе от сети перем.тока механич.хар-ки несколько мягче, особенно при больших нагрузках (рис.72). С целью сближения хар-к при работе от сети перем.тока включается меньшее число витков обмотки возбуждения, чем при питании от сети пост.тока. Уменьшение числа витков обмотки возбуждения вызывает уменьшение магн.потока, а значит повышение скорости вращения ротора. Механич.хар-ка приподымается, не меняя своей жесткости (пунктирная линия на рис.72). Наличие в коммутируемой секции нескомпенсированной трансформаторной ЭДС eтр= π√2*f1WkФm (Wk- число витков в коммутируемой секции) приводит к неудовлетворит.коммутации и как следствие к значительным радиопомехам. С целью устранения радиопомех универсальные коллекторные двигатели выпускаются со встроенными фильтрами, но полностью устранить радиопомехи не удается. Это ограничивает их применение в системах автоматики. Однако универсальные коллекторные микродвигатели довольно широко распространены, благодаря: 1)Работают от источников пост. и перем.тока 2) Допускают возможность простого, плавного и широкого регулирования скорости вращения ротора изменением подводимого к двигателю U и шунтированием якоря или обмотки возбуждения активным сопротивлением. 3) Позволяет получить при промышл.частоте весьма высокую скорость вращения ротора (до 2000 рад/с), что недостижимо при применении синхронных и асинхронных двигателей без повышающего редуктора.