

Вопрос № 21 сау эп нажимного устройства. Линейные и нелинейные регуляторы положения
Изменение расстояния между прокатными валками для получения требуемого обжатия металла достигается с помощью механизма установки валков
Наименование стана перемещения, Скорость мм/с
Блюминги 50—250
Слябинги 100—150
Толстолистовые и среднелистовые станы 5—25
Сортовые станы 2—5
Тонколистовые стана горячей и холодной прокатки 0,05—0,2
Реверсивные станы холодной прокатки 0,01-0,02
или нажимного устройства. В большинстве случаев перемещается верхний валок, а нижний остается неподвижным.Существуют нажимные устройства с ручным приводом, применяемые на некоторых сортовых станах; тихоходные нажимные устройства для листовых станов горячей и холодной прокатки с высотой подъема валка 100—200 мм и'небольшой скоростью перемещения, что обусловлено малыми перемещениями и требованием высокой точности при остановке; быстроходные нажимные устройства, предназначенные для станов с высотой подъема верхнего валка до 2000 мм (слябинги, блюминги, толстолистовые станы и т. п.). Скорости перемещения верхних валков различных станов:
Позиционный электропривод обеспечивает регулирование положения исполннтедь.-ного органа рабочей машины Он выполняет перемещение исполнительного органа из исходного в требуемое положение и его остановку с необходимой точностью. Этот электропривод должен также обеспечивать регулирование скорости и момента двигателя с хорошими статическими и динамическими качествами, облегчающими условие регулирования положения В позиционном электроприводе используются специальные устройства и датчики, контролирующие положение и перемещение. В электроприводах постоянного тока при питании ДПТ от управляемого преобразователя снижение скорости при остановке обеспечивается снижением задающего напряжения.Наибольшее распространение получил позиционные электроприводы постоянного тока с автоматическим регулированием положения по отклонению. В таких электроприводах используются датчики положения и перемещения. При использовании датчиков положения позиционирование предусматривается только в зоне остановки у требуемой позиции, а в процессе перемещений система по положению разомкнута. В этом случае используются индуктивные датчики положения, вырабатывающие сигнал, пропорциональный ошибке позиционирования, т. е. отклонению исполнительного органа от заданного положения. При использовании датчиков перемещения, осуществляющих непрерывный контроль положения исполнительного органа, электропривод постоянного тока выполняется с системой подчиненного регулирования, включающей контур положения. На рис. 10.11, а приведена структурная схема трехконтурн ния непрерывного действия. Сигнал задания по положению £/п,3 подан на вход регулятора положения AQ, на другой вход которого подается сигнал обратной связи по положению и„ с датчика положения BQ, в качестве которого используются индуктивные датчики линейного перемещения или фазовые датчики угла в виде сельсинов и поворотных трансформаторов. При использовании датчиков угла для формирования ошибки в виде напряжения постоянного тока и ее знака используются фазочувствительные выпрямители.
Р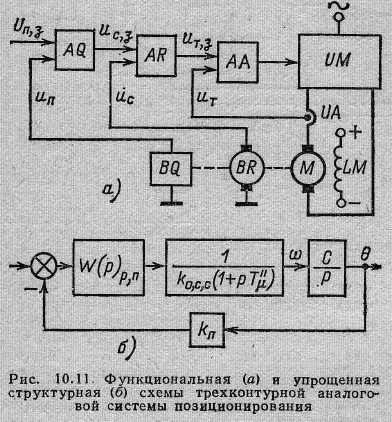 егуляторы
тока АА и
скорости AR
во, внутренних контурах
подчиненного регулирования могут
рассматриваться как один контур,
внутренний по отношению к контуру
положения. Тогда структурная схема
системы регулирования положения имеет
вид, показанный на рис. 10.11,6.
егуляторы
тока АА и
скорости AR
во, внутренних контурах
подчиненного регулирования могут
рассматриваться как один контур,
внутренний по отношению к контуру
положения. Тогда структурная схема
системы регулирования положения имеет
вид, показанный на рис. 10.11,6.
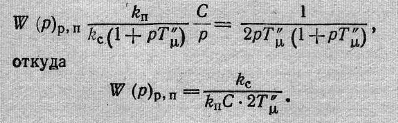
Внутренний контур аппроксимируется инерционным звеном с постоянной времени Т£, объект управления представляет собой интегрирующее звено, так как путь является интегралом от скорости. Постоянная интегрирования 1/С зависит от передаточного числа редуктора механизма.Контур положения настраивается на технический (модульный) оптимум, и регулятор положения принимается пропорциональным с линейной характеристикой. Его коэффициент усиления выбирается исходя из начальной скорости позиционирования и допустимого замедления электропривода.Передаточная функция регулятора положения в линейной рабочей зоне может быть найдена из соотношения
В зоне, где отработка рассогласования по положению происходит с ограничением тока, система становится нелинейной, и для улучшения динамики в регулятор положения вводится нелинейный преобразователь, обеспечивающий своевременное переключение системы в режим торможения.
Коэффициент передачи регулятора положения в этом случае делается переменным, зависящим от квадратного корня из рассогласования по положению.
Система регулирования положения может обеспечивать точное позиционирование при остановке, не работая во время перемещения, а замыкаясь только при подходе к месту остановки.
С истемы
регулирования положения являются,
как правило, нелинейными системами, так
как работают в режиме ограничения коор
лрнат движения. Так,
при средних перемещениях ограничивается
ток двигателя, а при больших — его
частота вращения. Ограничение координат
движения определяет в основном время
регулирования. Зазор между выходным
валом механизма, на котором установлен
датчик положения, и валом двигателя
может привести к неустойчивости системы
или увеличить время регулирования.
Нелинейным может быть и регулятор
положения, обеспечивающий оптимальное
регулирование при ограничениях
координат движения. В зависимости от
режима работы механизма и параметров
привода регулятор положения может быть
линейным или нелинейным и регулирование
статическим или астатическим.
истемы
регулирования положения являются,
как правило, нелинейными системами, так
как работают в режиме ограничения коор
лрнат движения. Так,
при средних перемещениях ограничивается
ток двигателя, а при больших — его
частота вращения. Ограничение координат
движения определяет в основном время
регулирования. Зазор между выходным
валом механизма, на котором установлен
датчик положения, и валом двигателя
может привести к неустойчивости системы
или увеличить время регулирования.
Нелинейным может быть и регулятор
положения, обеспечивающий оптимальное
регулирование при ограничениях
координат движения. В зависимости от
режима работы механизма и параметров
привода регулятор положения может быть
линейным или нелинейным и регулирование
статическим или астатическим.
Наладка описанных там систем производится в следующей последовательности:
а) настраивают контур регулирования тока и частоты вращения;
б) при замыкании системы регулирования - линейным регулятором положения дают за-лание на такой путь, чтобы привод вышел на ограничение по частоте вращения. С помощью электронного осциллографа, включенного на выход датчика скорости, наблюдают переходный процесс частоты вращения при торможе-!!и привода. Коэффициент усиления регуля-jpa положения подбирают так, чтобы привод одходил к заданному положению без пере-егулирования. Затем дают задание на мини-альный путь. При параболическом регулято--: положения привод должен подходить к заданному положению без дотягивания, а :эи линейном — с дотягиванием.В качестве примера на рис. 8-91 приведены переходные процессы отработки различных заданий на положение в системе регулирования с линейным и параболическим регуляторами положения.
ПРИ ОТРАБОТКЕ СРЕДНИХ И БОЛЬШИХ ПЕРЕМЕЩЕНИЙ. РЕАЛИЗАЦИЯ ТРЕБУЕМОГО ЗАКОНА ПЕРЕМЕЩЕНИЯВ большинстве промышленных электроприводов, оснащенных позиционными системами, наилучшим считается такой процесс отработки среднего перемещения, при котором скорость изменяется по треугольному графику. Это позволяет в полной мере использовать перегрузочную способность двигателя и исключает возникновение перерегулирования по положению. Для обеспечения такого характера отработки при данном значении заданного перемещения требуется определенное значение коэффициента передачи.
При рассмотрении отработки системой средних и больших перемещений обычно делается упрощающее допущение: считается, что токовый контур обладает высоким быстродействием, а постоянная времени фильтра тахогенератора Тдс равна нулю, т.е. что ТμО. благодаря чему передаточный коэффициент PC kp-c, достаточно велик. Тогда даже небольшое напряжение на выходе РП приводит к ограничению PC.
Пусть
в момент времени t0
на
вход системы подается
управляющее воздействие в виде задания
на перемещение фу
(в
аналоговом контуре системы сельсин СД
поворачивается
на
угол Ф¥
относительно согласованного положения).
Если оно достаточно
велико, напряжение на выходе РП
достигнет
значения ограничения
Up.п.огp.
Сразу же ограничится и PC.
Если Мс=Мс0= const,
то разгон двигателя под действием
момента Iя.макс
— Мс0
будет
происходить при постоянном ускорении.
В момент времени tl
зависящий
от значений кр.п
и Uр.п.огр,РП
выйдет
из ограничения и его напряжение будет
далее меняться по
закону Uр.п
= kр.пδФ.где
δФ = фу
— ф1. Это, однако, не повлечет за собой
изменения характера разгона, так как
PC
остается
по-прежнему
ограниченным.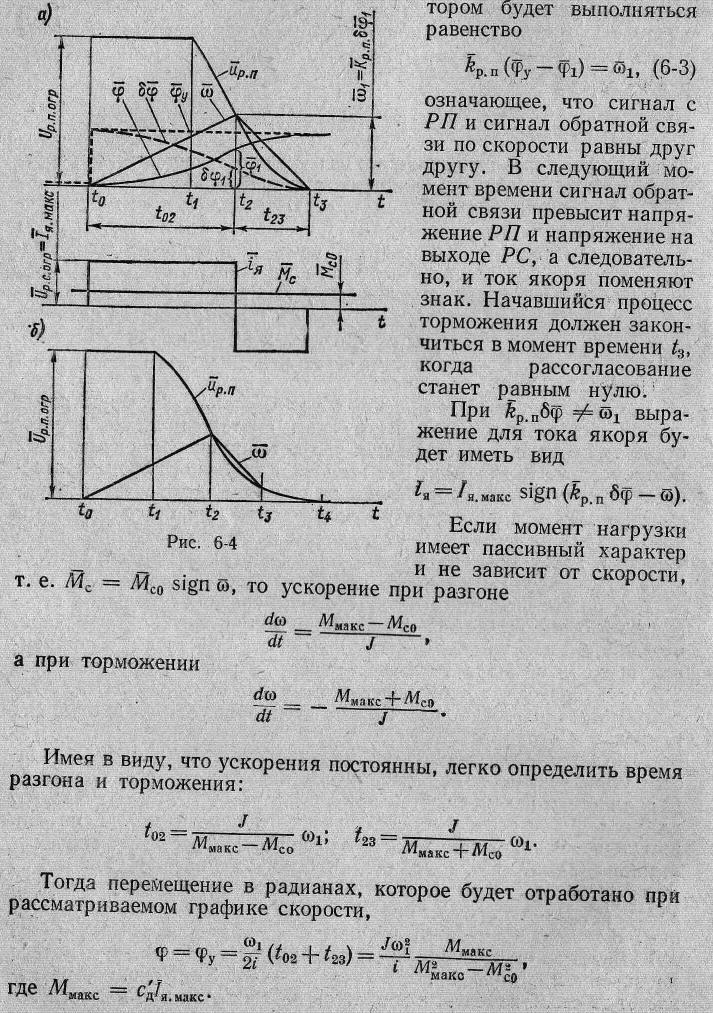

Отсюда видно, что значение £р.п, которое при данном максимальном токе обеспечивает отработку заданного среднего перемещения без перерегулирования и дотягивания, должно быть разрым для разных заданных перемещений фу и значений момента нагрузки УЙс0. ' " .
При других значениях заданного перемещения и неизменном значении £р-п график скорости будет отличаться от треугольного. На рис. 6-4, б показан характер изменения напряжения на выходе РП и скорости двигателя при меньшем значении фу. Во время разгона от t0 до 4 закон изменения ф остается таким же, как и в предыдущем случае, так какой определяется лишь значением Д.макс — Л^со- Однако, так как значение заданного перемещения меньше, равенство (6-3) обеспечивается при меньшем значении скорости. В момент времени ts сигналы на входе PC снова сравняются и он выйдет _из ограничения. При принятом допущении о высоком значении &р.с примерное равенство Sp.c я» со будет соблюдаться на протяжении всего оставшегося пути. Ток якоря станет меньше максимального, что приведет к снижению темпа торможения по сравнению с торможением при треугольном графике скорости, и отработка перемещения в течение времени 4 — 4 будет происходить с меньшим, чем раньше, ускорением, т. е. с до-тягиванием. При значении фу большем, чем входящее в выражение (6-5), перемещение будет отрабатываться с перерегулированием. Если применяется пропорциональный РП, то при определении £р.п по формуле (6-5) исходят из требования отработки по треугольному графику скорости некоторого настроечного перемещения. За него обычно принимают такое, при котором % = с*,,,; т. е. ffij = 1 для случая Мс = 0. На основании (6-4) оно составляет фу.иастр === Ги//я.макс. После подстановки фу = Фу.наСтР в выражение для &р.п получается требуемое для обеспечения треугольного графика скорости при настроечном перемещении значение Кр.п.=2*Iя макс / Тм. При этом, поскольку значение Uр.п.огр. должно обеспечивать скорость ω=ω1=1, момент времени t2 совпадает с моментом t2. Все перемещения, меньше настроечного, будут отрабатываться с дотягиванием, но перерегулирования, нежелатьельного в системах позиционированеия не будет. Перемещения, превышающее настроечное, будут относится к большим, т.к. после достижения двигателем скорости ω=ω1=1 рассогласование δФ будет достаточно большим, чтобы РП не вышел из ограничения. Тогда средняя часть перемещения будет отрабатываться с постоянной, равной номинальной, скоростью и график скорости станет трацепеидальным.
ПАРАБОЛИЧЕСКИЙ РЕГУЛЯТОР ПОЛОЖЕНИЯ IБлизкий к треугольному график скорости при любом, меньшем ™ настроечного, значении перемещения может быть получен при использовании РП с нелинейной статической характеристикой. Рассмотрим режим идеального холостого хода, когда М. =0. Тогда в соответствии с (6-5) надо выбрать Ц
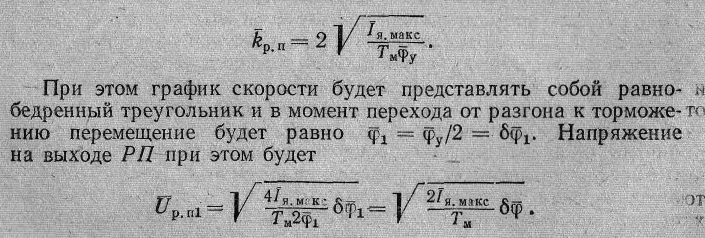
Чтобы обеспечить выполнение этого равенства при любых чениях фу, используют РП с нелинейной статической характеристикой, определяемой выражением
![]()
Н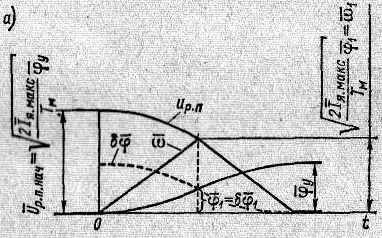 а
рис. 6-5, а показан
характер изменения основных координат
системы в этом случае. На участке
торможения относительные скорость и
напряжение РП. меняются
по одинаковому линейному закону
независимо от значения φу.
Фактически в
а
рис. 6-5, а показан
характер изменения основных координат
системы в этом случае. На участке
торможения относительные скорость и
напряжение РП. меняются
по одинаковому линейному закону
независимо от значения φу.
Фактически в
р еальной
системе Uр.п
на
большей части участка
торможения будет превышать ω
на некоторую величину,
достаточную для того, чтобы
PC,
имеющий конечный
коэффициент усиления, был ограничен,
что обеспечивает линейный закон
изменения скорости. Нелинейная
статическая характеристика РП,
построенная в
соответствии с формулой и с учетом того,
что Uвх.р.п
= δφ, показана на рис. 6-5, 6
(кривая 1).
еальной
системе Uр.п
на
большей части участка
торможения будет превышать ω
на некоторую величину,
достаточную для того, чтобы
PC,
имеющий конечный
коэффициент усиления, был ограничен,
что обеспечивает линейный закон
изменения скорости. Нелинейная
статическая характеристика РП,
построенная в
соответствии с формулой и с учетом того,
что Uвх.р.п
= δφ, показана на рис. 6-5, 6
(кривая 1).
При U.вх.р.п →0 коэффициент усилення РП теоретически должен становиться бесконечно большим. Благодаря этому попытка использования расчетной характеристики приводила бы к неустойчивости системы в согласованном положении. Чтобы избежать этого, начальный участок характеристики делают линейным (прямая 0 ба) и соответствующим коэффициенту усиления при настройке контура положения на оптимум по модулю. В результате получается характеристика 2 с изломом в точке а при входном напряжении РП U вх.р.п.= U1 .Реальные условия работы системы отличаются от рассмотренных идеализированных, с одной стороны, наличием момента статических сопротивлений, а с другой — тем, что в результате ограниченного быстродействия контура тока и конечного коэффициента усиления PC изменение якорного тока от +Iя.макс. до — Iя.макс происходит не мгновенно (как это показано на рис. 6-4, а), а в течение некоторого времени. Чтобы избежать при этом перерегулирования по положению, нужно начинать торможение раньше, чем в идеализированном случае. С учетом этого предлагается сочетание линейной и нелинейной части характеристики производить в точке б при Uвх.р.п = U2 = 0,5U1