

2.2.3. Способи визначення посадки судна при ході на тихій воді
2.2.3.1. Визначення змін посадки судна за допомогою модельного експерименту з вертикальними лінійками. Рух судна та його моделі
повільній поверхні рідини супроводжується появою ходового спли-
вання і ходового диференту.
При цьому осадка моделі TMм, кут ходового диференту мо- делі Vм, осадка моделі носом TFм і осадка моделі кормою TAм змінюються на величини Tм, Vм, TFм і TAм відповідно.
Для визначення змін куту диференту моделі при ході на тихій
воді та її осадки на носовому й кормовому краях моделі встанов- люються вертикальні лінійки (рис. 2.6), за допомогою яких визна- чається положення країв моделі щодо горизонтальної планки, жор- стко закріпленої на візку.
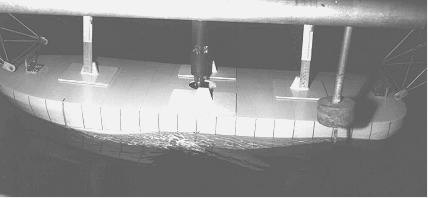
Рис. 2.6. Визначення ходових змін посадки моделі за допомогою фотоапарата і двох вертикальних лінійок, установлюваних на краях моделі
При відомих відстанях від мідель-шпангоута до носової та кор-
мової лінійок LlFм, L2Ам і обмірюваних значеннях змін у показан- нях лінійок ТlFм, Т2Ам ходові збільшення осадки носом та кор- мою моделі визначаються за формулами
TFм TlFм ( Lм
LlFм ) 2;
TАм TlАм ( Lм
LlАм ) 2.
(2.3l)
Зміни осадки моделі, її диференту й кута диференту визнача-
ються за допомогою співвідношень
Tм ( TFм TАм ) 2;
tsм = TAм – TFм; Vм = tsм/Lм. (2.32)
При проведенні серії буксирувань моделі з різними швидко- стями визначаються залежності від швидкості руху моделі змін у показаннях лінійок та величин, які обчислюються за формулами
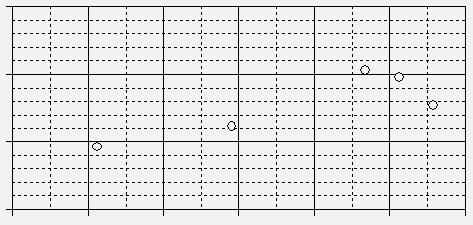
(2.3l) і (2.32). Такі залежності представляються в табличній формі й у вигляді графіків. Приклад експериментальної залежності хо- дового диференту моделі судна від швидкості її ходу представле- ний на рис. 2.7.
 l5
l0
l5
l0
5
0
0,6
0,7
0,8
0,9
l,0
l,l0
l,2
Швидкість руху моделі, м/с
Рис. 2.7. Експериментальна залежність ходового диференту моделі портового буксира від швидкості руху
2.2.3.2. Визначення змін посадки моделі судна за допомогою датчика вертикальних переміщень моделі й датчика її кута дифе- ренту. При автоматичному визначенні збільшень осадки моделі судна та кута її диференту використовуються датчик вертикаль- ного переміщення й датчик кутового переміщення моделі, які роз- ташовуються в державці моделі.
У зв'язку із цим, основними кінематичними реєстрованими
характеристиками руху й позиціонування моделі судна є: швидкість поступального руху моделі Vм; вертикальне переміщення моделі судна щодо незбуреного рівня вільної поверхні рідини в дослідному басейні Tм; кут ходового диференту моделі судна Vм.
Сигнали датчиків швидкості поступального руху моделі та
положення моделі щодо незбуреної вільної поверхні рідини запам'я- товуються й обробляються контролером швидкості руху моделі, розміщеному в корпусі перетворювача частоти, і контролером датчиків моделі, розміщеному на буксирувальному візку. Після повернення буксирувального візка в початкове положення кон- тролер, розташований на візку, за допомогою спеціального розн-
імання з'єднується з комп'ютером. При цьому записи усереднених
сигналів датчиків за час руху моделі на ділянці "усталеного руху"–
значення швидкості моделі, її вертикального переміщення й ходо- вого диференту – переносяться на комп'ютер. Усереднені значен- ня швидкості моделі, її вертикального переміщення й ходового ди- ференту також представляються на екрані комп'ютера.
Одержувані після кожного буксирування усереднені значення швидкості руху моделі, її вертикального переміщення й ходового диференту автоматично заносяться у відповідну таблицю прото- колу буксирувальних випробувань (табл. 2.l).
Після закінчення серії буксирувань накопичені дані усередне- них значень швидкості руху моделі, її вертикального переміщення й ходового диференту представляються у файлі комп'ютера у та- бличному й графічному вигляді.
Якщо державка прикріплюється до моделі таким чином, що її вертикальна вісь, яка збігається з віссю датчика вертикальних переміщень, виявляється на відстані Lh від площини мідель-шпан-
гоута, то зміна осадки моделі судна Tм визначається за формулою
Tм = Tмk – Lh Vм, (2.33)
де Tмk – показання датчика вертикального переміщення моделі, м.