

4.4. Машины для уборки кормовых культур
4.4.1. Косилки
Кинематическими показателями хода ножа являются перемещение х, скорость υ и ускорение ј в зависимости от угла поворота ωt кривошипа:
![]() (4.81)
(4.81)
где r – радиус кривошипа, м; ω – угловая скорость кривошипа, рад/с .
Путь, проходимый машиной за один ход ножа или за половину оборота кривошипа, называется подачей h и определяется по формуле:
![]() ,
(4.82)
,
(4.82)
где υм –поступательная скорость машины, м/с; Т – время полного оборота кривошипа, с.
В зависимости от перемещения ножа x скорость резания определяется по формуле:
![]() (4.83)
(4.83)
Траекторию абсолютного движения точек ножа можно определить по выражению:
 .
(4.84)
.
(4.84)
Наибольший поперечный отгиб стеблей вычисляется по зависимости
 ,
(4.85)
,
(4.85)
где t0 – шаг противорежущей части (расстояние между осевыми линиями пальцев); b – половина ширины противорежущей пластины.
Наибольший продольный отгиб стеблей определяется по выражению
 ,
(4.86)
,
(4.86)
где b1 – половина верхнего основания сегмента; h' – высота сегмента.
Минимальная угловая скорость вращения диска ротационного режущего аппарата определяется по формуле :
![]() (4.87)
(4.87)
где υм – поступательная скорость машины, м/с; h – длина активной кромки лезвия (ориентировочно можно принять как высоту сегмента); z– число ножей.
Пример 77. Для
косилки с радиусом кривошипа r=33
мм и угловой скоростью вращения ω=116
рад/с построить зависимости
![]() ;
;
![]() ;
;
![]() .
.
Решение: Для построения зависимостей , и используем кинематические характеристики ножей по выражению (4.81)
.
Расчеты можно свести в таблицу 4.7 и изобразить на рисунке 4.24 (зависимости , и ).
Таблица 4.7 - Расчетные данные
ωt (рад) |
0 |
|
|
|
π |
|
|
|
|
ωt, град |
0 |
45 |
90 |
135 |
180 |
225 |
270 |
315 |
360 |
х, мм |
0 |
9,9 |
33 |
56,2 |
66 |
56,2 |
33 |
9,9 |
0 |
υ, м/с |
0 |
2,71 |
3,83 |
2,71 |
0 |
-2,71 |
-3,83 |
-2,71 |
0 |
j, м/с2 |
444 |
314 |
0 |
-314 |
-444 |
-314 |
0 |
314 |
444 |
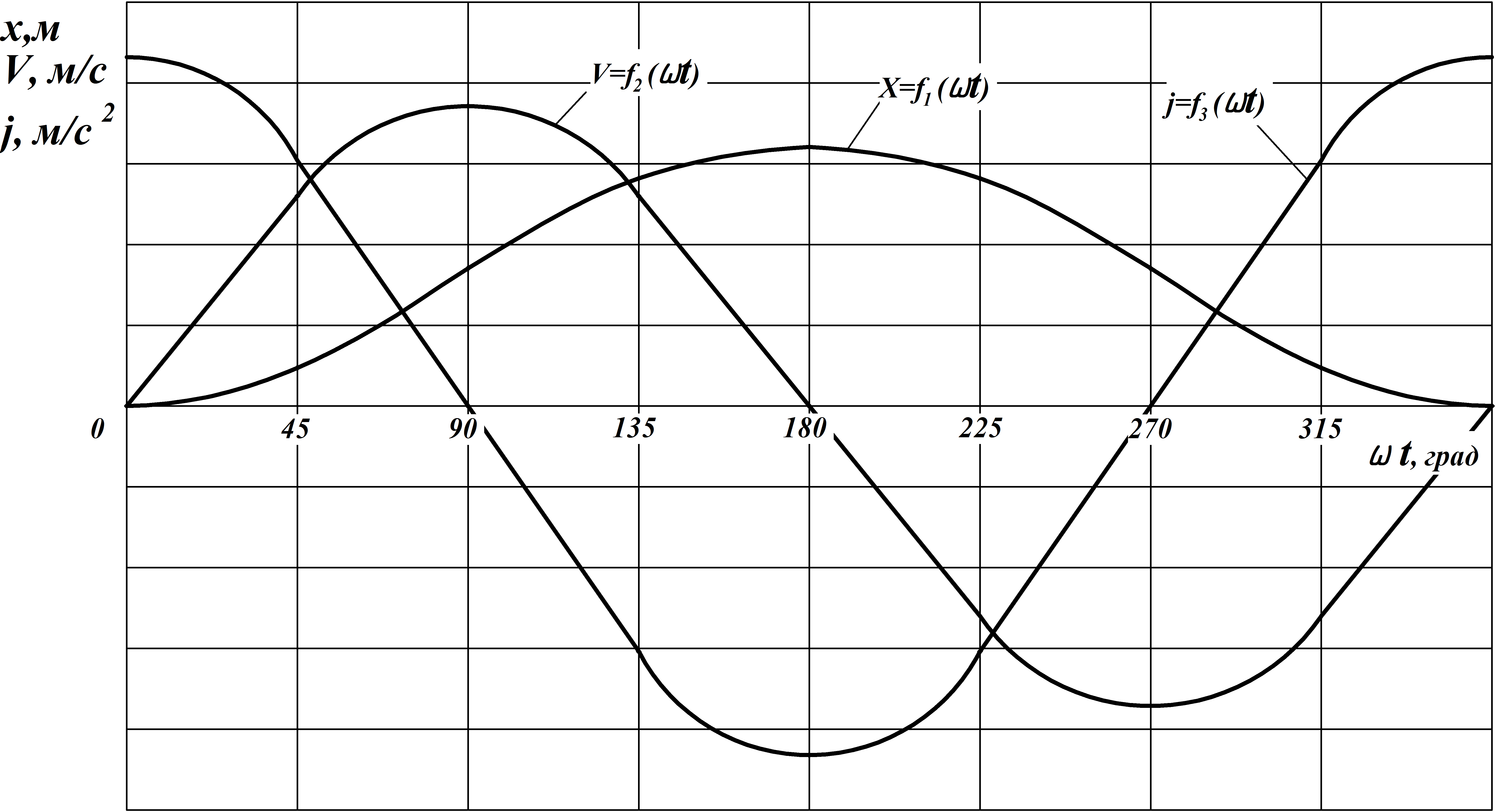
Рисунок 4.24 - Зависимости , и
Пример 78. Определить ход ножа S для косилки, если радиус эксцентрика r=33 мм, длина шатуна l=854 мм, а дезаксиал h=269 мм. Решение сопроводить расчетной схемой и доказать S>2r.
Решение: Рассмотрим расчетную схему (рисунок 4.25).
В аксиальном кривошипном механизме ход ножа S=2r. Из схемы видно, что
![]()
или
![]() .
(1)
.
(1)
После некоторых преобразований (1), получим
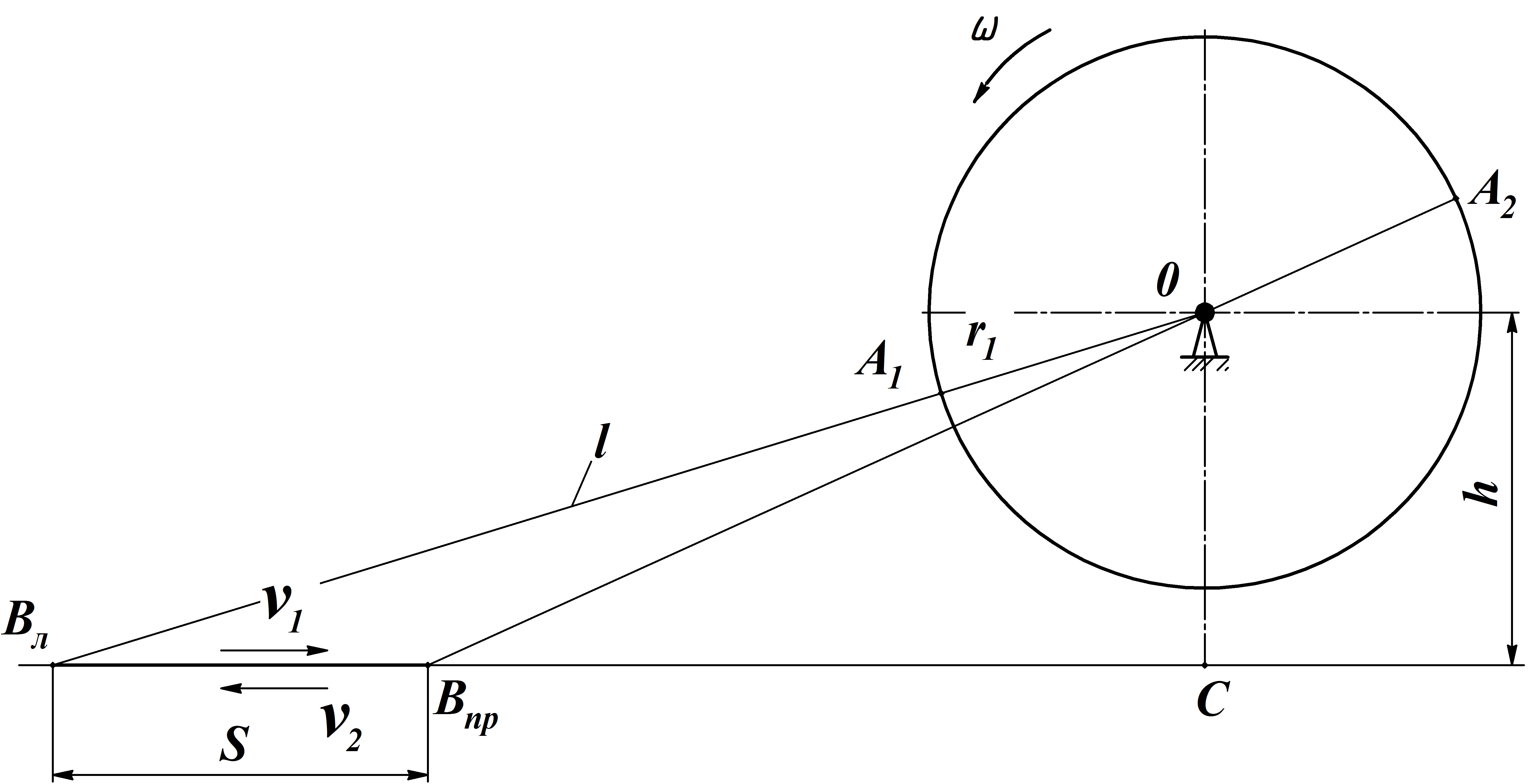
Рисунок 4.25 - Схема к определению хода ножа
 .
(2)
.
(2)
Так как l>h, то подкоренное выражение будет меньше единицы, следовательно, S>2r.
Подставив исходные данные задачи в (1), получим
![]() мм.
мм.
Ответ: S = 70 мм; S>2r = 66 мм.
Пример 79. Определить подачу h ножа косилки, движущейся со скоростью υм=1,8 м/с, если угловая скорость вращения кривошипа ω=140 рад/с.
Решение: Подачу h можно определить по формуле (4.82)
![]() м;
м;
Ответ: h=40,4 мм.
Пример 80. Аналитически определить и построить траекторию абсолютного движения точки сегмента для косилки при υм =10 км/ч, r=33 мм и n=1107 мин-1.
Решение: Каждая точка ножа сегментно-пальцевого режущего аппарата участвует в сложном движении. Оно складывается из относительного движения по первому уравнению (4.81) и переносного вместе с машиной υм, определяемого уравнением
y= υм t. (1)
Выразив из первого уравнения (4.81) время
![]() и подставив в (1),
получим
и подставив в (1),
получим
![]() (2)
(2)
Кроме того, величина
![]() по формуле (4.82) равна
по формуле (4.82) равна
![]() ,
тогда выражение (2) примет вид
,
тогда выражение (2) примет вид
![]() .
(3)
.
(3)
Полученное уравнение (3) представляет собой траекторию абсолютного движения точки сегмента. Траектория абсолютного движения может быть построена также графическим сложением относительного и переносного движений (рисунок 4.26).
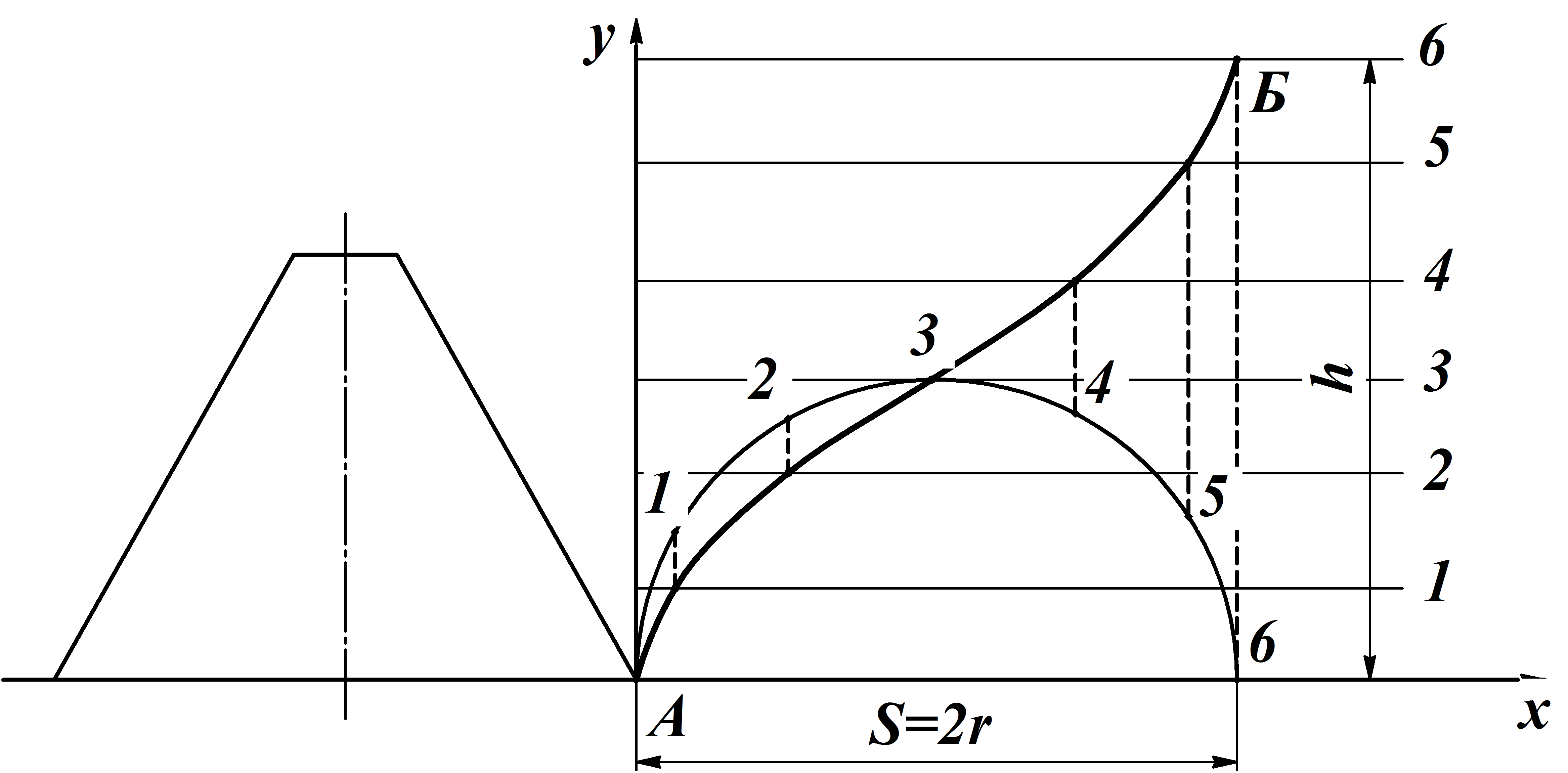
Рисунок 4.26 - Траектория абсолютного движения точки А ножа
Для этого на оси У отложим отрезок, равный в масштабе подаче h, через точку А проведем полуокружность радиусом r, соответствующую траектории движения пальца кривошипа при повороте его на угол ωt=π. Отрезок h и полуокружность разделим на одинаковые числа частей. Найдем точки пересечения вертикальных и горизонтальных линий, проходящих через соответствующие точки деления. Полученные точки пересечения лежат на траектории абсолютного движения точки сегмента А.
Величину подачи h определим по выражению (4.82)
![]() м;
м;
где υм
=10 км/ч=2,78м/с;
![]() рад/с.
рад/с.
Ответ: .
Пример 81. Определить величину наибольшего поперечного отгиба q и высоту стерни l при этом, если режущий аппарат установлен на высоту среза Н=50 мм, частота вращения вала кривошипа n=925 мин-1, скорость машины υм =7,5 км/ч; t0=76,2 мм; 2b=30 мм; r=34 мм.
Решение: Величину наибольшего поперечного отгиба q определяем по выражению (4.85)
 мм.
мм.
где
![]() мм
мм
υм =7,5 км/ч=2,08 м/с.
![]() .
.
Ответ: q=72,5 мм; l=88 мм.
Пример 82. Определить
величину наибольшего продольного
отгиба q1
и высоту стерни l1
при этом, если косилка характеризуется:
n=1107
мин-1;
υм
=9 км/ч; r=33
мм; 2b≈30
мм; 2b1=16
мм;
![]() ;
H=50
мм.
;
H=50
мм.
Решение: Величину наибольшего продольного отгиба стеблей определяем по выражению (4.86):

где
![]()
![]()
![]() с-1.
с-1.
![]() мм.
мм.
Ответ: q1=25,1 мм; l1=56 мм.
Пример 83. Определить минимальную угловую скорость вращения дисков и окружную скорость ножа ротационного режущего аппарата, если υм=18 км/ч; R=0,3 м; h=0,08 м; z=2.
Решение: Минимальную угловую скорость вращения дисков ротационного режущего аппарата определяется по выражению (4.87):
![]() рад/с.
рад/с.
Окружная (линейная) скорость υ0 определяется по формуле:
![]() м/с.
м/с.
Ответ: ωmin≥196,25 рад/с; υ0= 58,8 м/с.
Упражнения
4.1. Доказать, что
подача определяется по выражению
![]() .
.
4.2. Используя
кинематические характеристики ножа
(4.81), доказать, что
![]() .
.
4.3. Установить, что дезаксиал h увеличивает ход ножа S.
4.4. Используя
кинематические характеристики ножа
(4.81), установить, что
![]() .
.
4.5. Установить, как влияет дезаксиал h на скорость ножа υ.
4.6. Для режущего аппарата нормального резания с одинарным пробегом ножа S=t=t0=76,2 мм построить траекторию абсолютного движения лезвия сегмента, если поступательная скорость косилки υм, кривошипный вал привода ножа вращается угловой скоростью ω.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
υм , м/с |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
1,8 |
1, 9 |
ω, рад/с |
115 |
120 |
130 |
140 |
150 |
115 |
120 |
130 |
140 |
150 |
4.7. Определить подачу h ножа косилки, движущегося со скоростью υм, если угловая скорость вращения кривошипного вала ω.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
υм, м/с |
1,0 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,7 |
1,8 |
1, 9 |
ω, рад/с |
115 |
120 |
130 |
140 |
150 |
115 |
120 |
130 |
140 |
150 |
4.8. Определить величину наибольшего поперечного отгиба q и высота стерни l, если режущий аппарат S=t=t0=76,2 мм установлен на высоту среза Н=50 мм, частота вращения вала кривошипа n, скорость машины υм, 2b=30 мм.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
υм, км/ч |
6,0 |
6,5 |
7,0 |
7,5 |
8,0 |
8,5 |
9,0 |
9,5 |
10,0 |
10,5 |
n,мин-1 |
925 |
925 |
925 |
1107 |
1107 |
1107 |
925 |
925 |
1107 |
1107 |
4.9. Определить величину наибольшего поперечного отгиба q и высоту стерни l, если режущий аппарат S=t=t0=76,2 мм установлен на высоту среза Н=70 мм, частота вращения вала кривошипа n, скорость машины υм , 2b=30 мм.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
υм, км/ч |
6,0 |
6,5 |
7,0 |
7,5 |
8,0 |
8,5 |
9,0 |
9,5 |
10,0 |
10,5 |
n, мин-1 |
925 |
925 |
925 |
1107 |
1107 |
1107 |
925 |
925 |
1107 |
1107 |
4.10. Режущий аппарат
нормального резания с одинарным пробегом
ножа имеет радиус кривошипа r=38,1
мм, высоту активной части сегмента
![]() ,
ширина пальца 2b=29
мм, угол наклона режущего лезвия к осевой
линии сегмента α=28,6.
Угловая скорость вращения кривошипного
вала ω=150
рад/с. Определить скорость ножа в начале
и в конце резания.
,
ширина пальца 2b=29
мм, угол наклона режущего лезвия к осевой
линии сегмента α=28,6.
Угловая скорость вращения кривошипного
вала ω=150
рад/с. Определить скорость ножа в начале
и в конце резания.
4.11. По условиям задачи 4.10 построить график скорости резания и из него определить скорость начала и конца резания, если частота вращения кривошипного вала n=840 мин-1.
4.12. Определить среднюю скорость ножа косилки для режущего аппарата S=2t=2t0=152,4 мм, если угловая скорость вращения вала кривошипа ω = 140 рад/с.
4.13. Определить величину и направление слагающей скорости Vл, направленной вдоль лезвия сегмента для режущего аппарата, характеризуемого показателями S=t=t0=90 мм при n=85 с-1 и угле наклона лезвия α=37,4 и поступательной скорости υм =1,8 м/с.
4.14. Определить величину наибольшего поперечного отгиба q1 и высоту стерни l1 при этом, если косилка характеризуется: n, υм , r=33мм; 2b≈30 мм; 2b1=16 мм, и Н.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
n, мин-1 |
925 |
925 |
925 |
925 |
925 |
1107 |
1107 |
1107 |
1107 |
1107 |
υм, км/ч |
6,0 |
6,5 |
7,0 |
7,5 |
8,0 |
6,0 |
6,5 |
7,0 |
7,5 |
8,0 |
Н, мм |
50 |
55 |
60 |
65 |
70 |
50 |
55 |
60 |
65 |
70 |
4.15. Определить минимальную частоту вращения диска ратационного режущего аппарата, если известны υм, h и z.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
υм , км/ч |
10 |
12 |
14 |
16 |
18 |
10 |
12 |
14 |
16 |
18 |
h, мм |
80 |
100 |
80 |
100 |
80 |
100 |
80 |
100 |
80 |
100 |
z, шт |
4 |
2 |
4 |
2 |
4 |
2 |
4 |
2 |
4 |
2 |
4.16. Определить коэффициент излишне пробегаемой лезвием площади для косилки при следующих данных: υм, n, r=33 мм, h=55 мм, 2b1=16 мм, t=76,2 мм.
Варианты |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
υм, км/ч |
6,0 |
6,5 |
7,0 |
7,5 |
8,0 |
6,0 |
6,5 |
7,0 |
7,5 |
8,0 |
n, мин-1 |
925 |
925 |
925 |
925 |
925 |
1107 |
1107 |
1107 |
1107 |
1107 |