

2.7. Микроскоп мис-11
Микроскоп МИС-11 конструкции В.П. Линника (двойной микроскоп Линника) предназначен для измерения высоты неровностей методом светового сечения. (рис 2.11.).
Микроскоп состоит из двух тубусов, которые при фокусировке перемещаются по вертикальной стойке.
Луч света из осветительного тубуса проходит через узкую щель диафрагмы, падает на измеряемую поверхность под углом = 45 и рассекает ее рельеф световой плоскостью.
Профиль поверхности в сечении световой плоскостью наблюдается в поле зрения измерительного тубуса, а его параметры измеряются с помощью окуляр-микрометра, установленного на измерительном тубусе.

Рис.11 Оптическая схема микроскопа МИС-11
2.8. Профилометр пч-3
Профилометр ПЧ-3 конструкции В.С. Чамана предназначен для измерения среднего арифметического отклонения профиля. (рис 2.12.)
Профилометр состоит из индуктивного датчика с алмазной иглой, перемещаемого по измеряемой поверхности от руки, электронного усилителя с интегратором и регистрирующего устройства.
Индуктивный датчик преобразует вертикальное перемещение в индуктивность. Индуктивный датчик представляет собой неподвижный магнитопровод (сердечник) 1 с катушкой индуктивности 2 и подвижный магнитопровод (якорь) 3 с алмазной иглой 4. Якорь с алмазной иглой крепится к сердечнику с помощью двух плоских пружин 5.
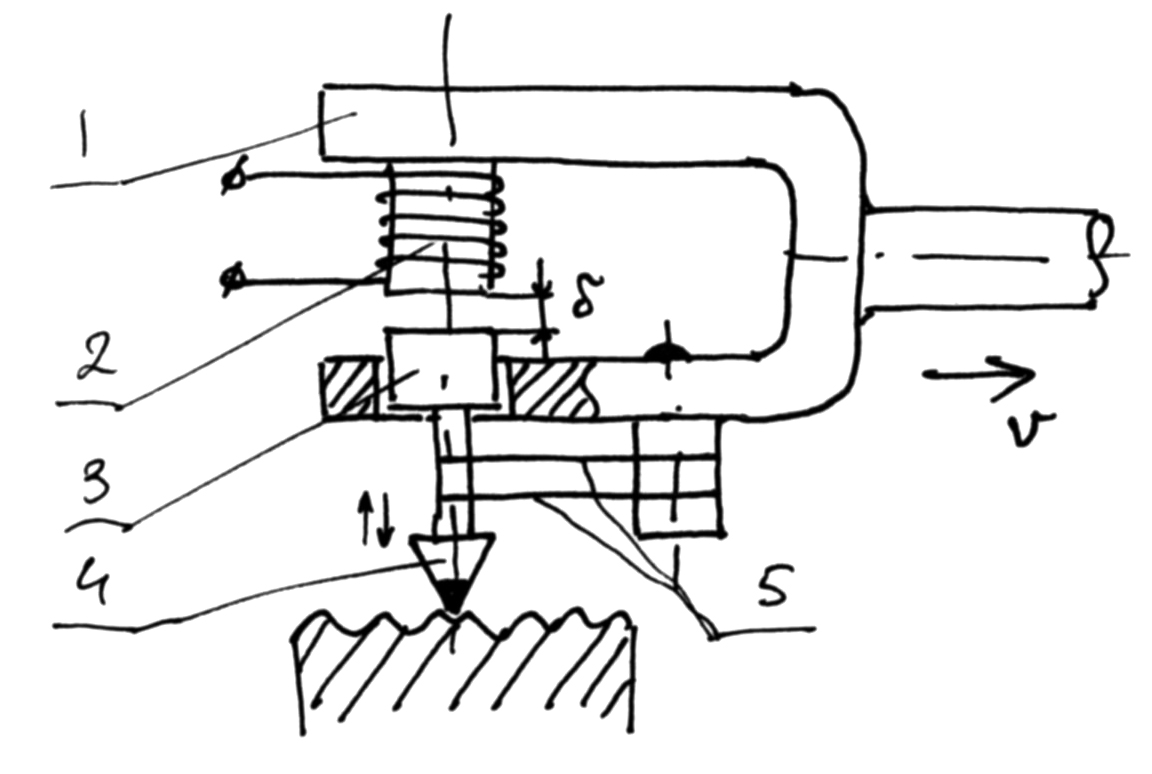
Рис.12 Индуктивный датчик профилометра ПЧ-3
Перемещение алмазной иглы при ощупывании поверхности изменяет зазор между якорем и сердечником. В результате этого изменяется магнитное сопротивление и индуктивность L катушки 2.
Функция преобразования датчика равна:
![]() ,
Гн,
,
Гн,
где – зазор, мм;
f – площадь зазора, мм2;
– магнитная проницаемость, Гн\м2;
N – число витков катушки индуктивности.
Чувствительность индуктивности датчика равна
![]() ,
Гн/м.
,
Гн/м.
Индуктивный датчик включается в мост, питаемый от генератора переменного тока напряжением U0 с частотой 5 кГц. Напряжение на выходе моста преобразуется с помощью интегрирующего усилителя в напряжение, пропорциональное среднему арифметическому отклонению профиля.
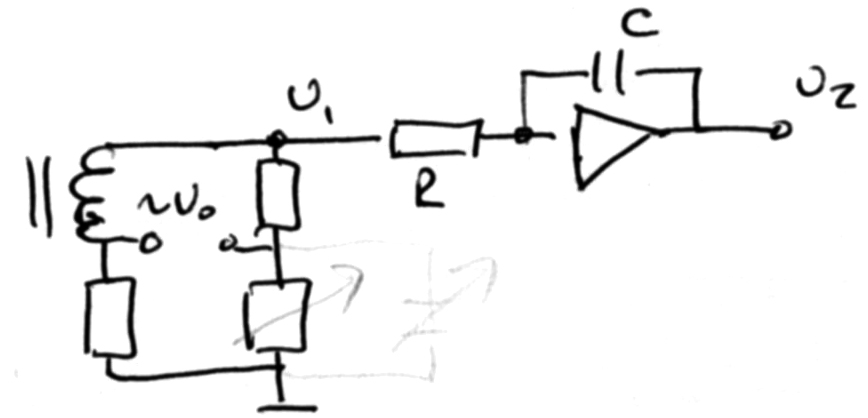
Напряжение на выходе усилителя связано с напряжением на входе зависимостью
![]() ,
В.
,
В.
3. Моделирование резания
Моделирование резания – процедура получения информации о резании из информации о виде и размере модели, информации о воздействиях и информации о состояниях. Информация о резании представляется в виде математической модели резания, т.е. системы математических соотношений между параметрами Ri и факторами Zj резания.
Вид и размер математической модели. Вид математической модели выбирается в зависимости от способа решения задачи управления. Для описания резания могут использоваться следующие виды моделей:
а) линейные
![]()
б) квадратные

в) кубические

г) экпоненциальные мультипликативные
![]()
д) степенные мультипликативные
![]()
е) экспоненциально-степенные мультипликативные
![]()
Для описания резания могут применяться как детерминированные, так и стохастические математические модели вида
 .
.
Размер математической модели определяется количеством параметров резания m и количеством факторов резания n.
План эксперимента. Информация о воздействии представляется в виде плана эксперимента. План эксперимента – р сочетаний n факторов, варьируемых на S уровнях в n-мерном факторном пространстве. Число опытов Р должно быть не меньше числа неизвестных параметров модели
![]() ,
,
где n – число факторов;
q – порядок модели.
Для экспериментирования применяют различные планы. Среди них: классический, факторный (полный и дробный), латинский, греко-латинский, рациональный и композиционный.
Экспериментальные данные. Информация о состояниях представляется в виде экспериментальных данных, т.е. измеренных в каждом опыте значений параметров резания Ri. Средствами для выработки информации о параметрах резания Ri являются измерительные приборы. Описание приборов см. в разделе 2.
Параметры математической модели. Значения параметров математической модели – коэффициентов и экспонентов – определяются методом наименьших квадратов. Для этого решают систему линейных уравнений. Линеаризация уравнений происходит путем подстановок:
а) для линейных моделей
![]()
б) для квадратных моделей
![]()
в) для кубических моделей
![]()
г) для экспоненциальных моделей
![]()
д) для степенных моделей
![]()
е) для экспоненциально-степенных моделей
![]()
Для определения показателя распределения i вычисляют отклонения измеренных значений Ri от расчетных f(zj) и ранжируют их по возрастающей.
Вычисления осуществляются на ЭВМ по программе параметрической идентификации MOD UNI, разработанной авторами на кафедре ВТО МГТУ «Станкин».