

vk.com/club152685050 | vk.com/id446425943
2.2.Вибір конфігурації контролера і схем підключення
2.2.1.Схема автоматизації
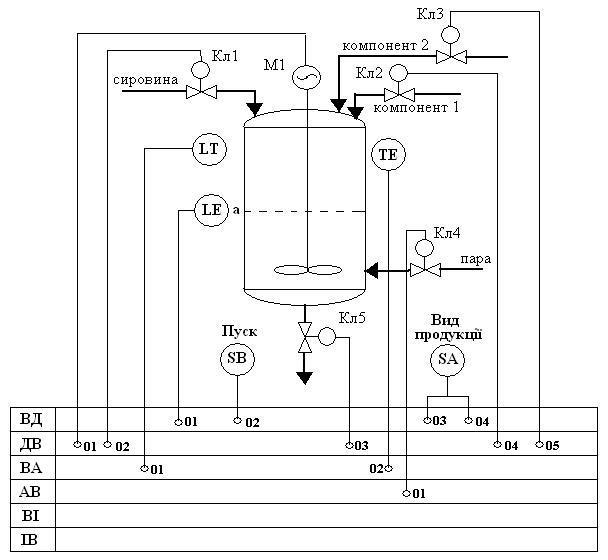
Для вибору моделі контролера і його конфігурації необхідно визначитись з переліком технічних засобів автоматизації, які будуть використовуватись для реалізації алгоритму управління. При цьому дуже важливо знати параметри сигналів від датчиків і на виконавчі механізми. На рис. 3 наведена спрощена функціональна схема автоматизації на якій показані датчики і виконавчі механізми, а також типи сигналів для їх підключення до мікропроцесорного контролера (МПК).
Рис. 3. Спрощена схема автоматизації:
ВД – входи дискретні; ДВ – виходи дискретні; ВА – входи аналогові; АВ – аналогові виходи; ВІ – входи імпульсні; ІВ – імпульсні виходи
Вибір технічних засобів.
1.Для неперервного вимірювання рівня (LT) – ультразвуковий рівнемір з вихідним сигналом 0 – 20 мА. При підключенні до МПК - вхідний аналоговий сигнал (01).
vk.com/club152685050 | vk.com/id446425943
2.Для сигналізації досягнення рівня «а» (LЕ) - ємнісний сигналізатор рівня. Вхідний дискретний сигнал (01).
3.Для вимірювання температури (ТЕ) – термометр опору з вбудованим нормуючим перетворювачем і вихідним сигналом 0 – 20 мА. Вхідний аналоговий сигнал (02).
4.Кнопка «Пуск» (SB) – вхідний дискретний сигнал (02).
5.Перемикач (виду продукції) (SА) – Два вхідних дискретних сигнали: 03 – при виборі виду продукції №1, 04 - при виборі виду продукції №2.
6.Клапани Кл 1, Кл 2, Кл 3, Кл 5 – дискретні електропневматичні клапани. 4 дискретних вихідних сигнали – 01, 03, 04, 05.
7.Управління мішалкою за допомогою магнітного пускача. Дискретний вихідний сигнал – 02.
8.Клапан Кл 4 – пневматичний клапан з аналоговим електропневматичним перетворювачем. Управляючий сигнал 0 – 20 мА. Аналоговий вихідний
сигнал – 01.
При виборі технічних засобів автоматизації слід підібрати конкретні засоби зкаталогів фірм виробників та привести стислу технічну характеристику(скористатись посиланнями [7])
Таким чином для управління об’єктом необхідно сконфігурувати МПК який забезпечує підключення: 4 дискретних вхідних сигналів, 5 дискретних вихідних сигналів, 2 вхідних аналогових сигналів 0 – 20 мА і 1 аналогового вихідного сигналу 0 – 10 В.
2.2.2. Конфігурування МПК і схеми підключення зовнішніх пристроїв
2.2.2.1. МПК Ломіконт
Для реалізації алгоритму управління можна вибрати модель Ломіконта Л- 120 з наступною конфігурацією:
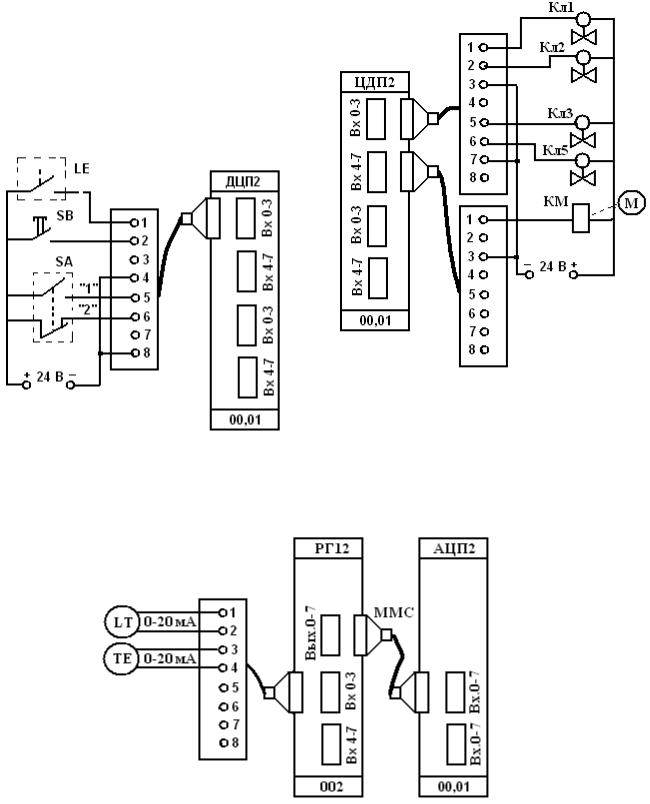
Модулі базового комплекту: ПРЦ7 і МП7. Модулі входів-виходів:
-1 модуль дискретних входів – ДЦП2. 16 входів, настроєний на роботу з групами змінних 00 і 01;
-1 модуль дискретних виходів – ЦДП2. 16 виходів, настроєний на роботу з групами змінних 00 і 01;
-1 модуль аналогових входів АЦП2. 16 входів, настроєний на роботу з групами змінних 00 і 01. До групи входів 00 підключений 1 модуль гальванічного розподілення РГ12. Для забезпечення можливості підключення до РГ12 сигналів від датчиків рівня і температури 0 – 20 мА на клемній колодці встановлюються резистори 400 Ом;
-1 модуль аналогових виходів ЦАП2. 8 виходів, настроєний на роботу з групою змінних 00 з сигналом 0 – 0-20 мА.
На рис. 4 – рис. 7 показані варіанти схем під‘єднання зовнішніх пристроїв до відповідних модулів МПК. Схеми під‘єднання до окремих модулів Ломіконта наведені у [1, сторінки 94-103] та [2, сторінки 36-43]. На схемі під‘єднання дискретних виконавчих механізмів зроблено спрощення, яке полягає у тому, що
vk.com/club152685050 | vk.com/id446425943
виконавчі механізми під‘єднані безпосередньо до дискретних виходів. При цьому треба пам‘ятати, що дискретні вихідні модулі мають транзисторні ключі, які можуть комутувати ланцюги постійної напруги до 48 В з струмом комутації тільки до 200 мА. Тому, якщо струм спрацьовування виконавчого механізму є більшим необхідно використовувати проміжне реле, через контакти якого будуть підключатись виконавчі механізми.
Рис.5. Схема під‘єднання дискретних вихідних сигналів
Рис.4. Схема під‘єднання дискретних вхідних сигналів
Рис.6. Схема під‘єднання аналогових вхідних сигналів

vk.com/club152685050 | vk.com/id446425943
Рис.7. Схема під‘єднання аналогових вихідних сигналів
У відповідності з схемами підключення визначаємо адреси зовнішніх вхідних і вихідних сигналів, які наведені у таблиці 1.
|
|
|
Таблиця 1 |
|
Адреси входів-виходів на МПК Ломіконт |
|
|||
Вхідні сигнали |
|
|
|
|
Джерело сигналу |
Позначення на СА |
Адреса |
||
Сигналізатор рівня |
LE |
ВД01 |
ВД000 |
|
Кнопка «ПУСК» |
SB |
ВД02 |
ВД001 |
|
Перемикач вибору продукції: - продукт №1 |
SA |
ВД03 |
ВД002 |
|
- продукт №2 |
ВД04 |
ВД003 |
||
|
||||
Датчик рівня (аналоговий) |
LT |
ВА01 |
ВА000 |
|
Датчик температури |
TE |
ВА02 |
ВА001 |
|
Вихідні сигнали |
|
|
|
|
Виконавчий пристрій |
Позначення на СА |
Адреса |
||
Магнітний пускач двигуна мішалки |
М1 |
ДВ01 |
ДВ004 |
|
Клапана подачі сировини (дискретний) |
Кл1 |
ДВ02 |
ДВ000 |
|
Клапана зливу (дискретний) |
Кл5 |
ДВ03 |
ДВ003 |
|
Клапана подачі компоненту 1 (дискретний) |
Кл2 |
ДВ04 |
ДВ001 |
|
Клапана подачі компоненту 2 (дискретний) |
Кл3 |
ДВ05 |
ДВ002 |
|
Клапана подачі пари (аналоговий) |
Кл4 |
АВ01 |
АВ000 |
|
vk.com/club152685050 | vk.com/id446425943
2.2.2.2. МПК Реміконт 130
Для реалізації алгоритму управління на базі Реміконта 130, у відповідності з типами і кількістю зовнішніх сигналів може бути вибрана регулююча модель Реміконта 130 з модифікацією – 15 [1, сторінка 108] та [2, сторінка 48]. Таким чином у вибраній модифікації контролера встановлені два модуля пристрою зв‘язку з об‘єктом (ПЗО) [1, сторінка 151] та [2, сторінка 80]:
-МАС – модуль аналогових сигналів, який працює з 8 аналоговими входами і 2 аналоговими виходами і який під‘єднаний до розніму зовнішніх з‘єднань «А»;
-МСД 8/8 – модуль дискретних сигналів, який працює з 8 дискретними входами і 8 дискретними виходами і який під‘єднаний до розніму зовнішніх з‘єднань «Б».
Схема зовнішніх з‘єднань для рознімів групи А і Б визначається тільки типом модуля ПЗО. Зовнішні з‘єднання для модулів аналогових сигналів наведені
у[1, сторінка 153], а для модулів дискретних сигналів у [1, сторінка 152] та [2, сторінка 80].
На рис. 8 наведений варіант схеми підключення датчиків і виконавчих механізмів до контролера.
Під‘єднання зовнішніх пристроїв до рознімів контролера відбувається за допомогою клемно-блокових з‘єднань. У деяких випадках використовуються додаткові блоки [1, сторінки 110-111] та [2, сторінка 48].
На схемі під‘єднання дискретних виконавчих механізмів, як і для Ломіконта, зроблено спрощення, яке полягає у тому, що виконавчі механізми під‘єднані безпосередньо до дискретних виходів. При цьому треба пам‘ятати, що дискретні вихідні модулі Реміконта Р-130 мають транзисторні ключі, які можуть комутувати ланцюги постійної напруги до 40 В з струмом комутації тільки до 300 мА. Тому, якщо струм спрацьовування виконавчого механізму є більшим необхідно використовувати блок підсилювача потужності БУМ [1, сторінки 110111] та [2, сторінка 48], релейні виходи якого можуть комутувати ланцюги напруги до 220 В з струмом комутації до 2 А.
Таким чином, у відповідності з схемою підключення, аналогові сигнали будуть подаватись у контролер на відповідні входи алгоритму вводу ВАА і алгоритми виводу АВА, а дискретні сигнали на відповідні входи алгоритмів ВДБ і ДВБ.
2.2.2.1.Мікропроцесорні контролери MODICON TSX
vk.com/club152685050 | vk.com/id446425943
Складність алгоритму управління і кількість зовнішніх пристроїв дає можливість для керування об‘єктом використати малопотужні контролери. Але у зв‘язку з тим, що в курсовому проекті рекомендується використовувати контролери Modicon TSX Micro або Modicon TSX Premium, які працюють з програмною оболонкою PL7 Pro, вибираємо один із цих типів контролера.
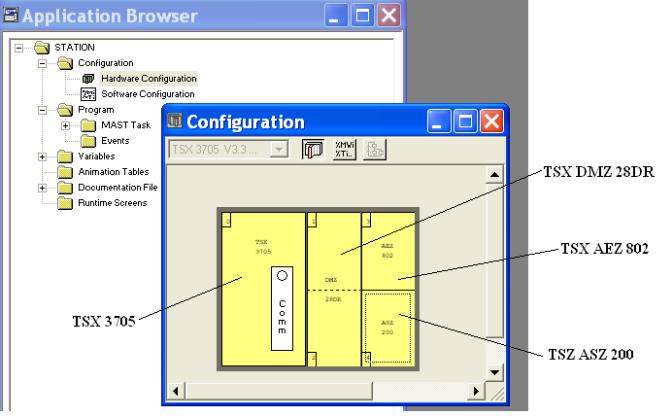
Як один із можливих варіантів, пропонується вибрати модель Modicon TSX Micro 3705 у конфігурації наведеної на рис. 9.
vk.com/club152685050 | vk.com/id446425943
Рис. 9. Конфігурування контролера Modicon TSX Micro 3705
До складу контролера крім процесорного модуля входять:
-комбінований повноформатний модуль TSX DMZ 28DR, який встановлений
упершому слоті і займає 1-е і 2-е місця. Модуль має 16 дискретних входів з напругою 24 В постійного струму та 12 релейних виходів з струмом комутації 3 А та напругою 24 В постійного струму і 24-240 В змінного струму;
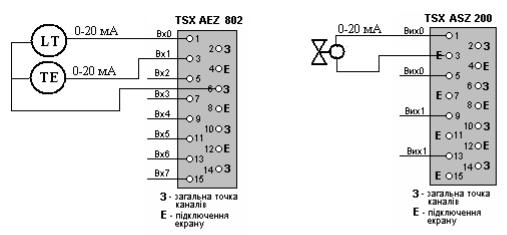
-напівформатний модуль аналогових входів TSX AEZ 802, який розташований на 3-му місці і працює з 8 аналоговими сигналами 0-20 або 4-20 мА;
-ніпівформатний модуль аналогових виходів TSX ASZ 200, який розташований на 4-му місці і працює з 2 аналоговими сигналами 0-20, 4-20 мА або 0-10 В;
На рис. 10-11 наведені схеми підключення зовнішніх пристроїв до модулів
МПК.

vk.com/club152685050 | vk.com/id446425943
Рис.10. Схема підключення дискретних сигналів
vk.com/club152685050 | vk.com/id446425943
Рис.11. Схема підключення аналогових сигналів
У відповідності зі схемами підключення визначаються адреси входіввиходів для МПК TSX Micro 3705, наведені у табл.2.
|
|
|
Таблиця 2 |
|
Адреси входів-виходів на МПК TSX Micro |
|
|||
Вхідні сигнали |
|
|
|
|
Джерело сигналу |
Позначення на СА |
Адреса |
||
Сигналізатор рівня |
LE |
ВД01 |
%I1.0 |
|
Кнопка «ПУСК» |
SB |
ВД02 |
%I1.1 |
|
Перемикач вибору продукції: - продукт №1 |
SA |
ВД03 |
%I1.2 |
|
- продукт №2 |
ВД04 |
%I1.3 |
||
|
||||
Датчик рівня (аналоговий) |
LT |
ВА01 |
%IW3.0 |
|
Датчик температури |
TE |
ВА02 |
%IW3.1 |
|
Вихідні сигнали |
|
|
|
|
Виконавчий пристрій |
Позначення на СА |
Адреса |
||
Магнітний пускач двигуна мішалки |
М1 |
ДВ01 |
%Q2.4 |
|
Клапана подачі сировини (дискретний) |
Кл1 |
ДВ02 |
%Q2.0 |
|
Клапана зливу (дискретний) |
Кл5 |
ДВ03 |
%Q2.3 |
|
Клапана подачі компоненту 1 (дискретний) |
Кл2 |
ДВ04 |
%Q2.1 |
|
Клапана подачі компоненту 2 (дискретний) |
Кл3 |
ДВ05 |
%Q2.2 |
|
Клапана подачі пари (аналоговий) |
Кл4 |
АВ01 |
%QW4.0 |
|

vk.com/club152685050 | vk.com/id446425943
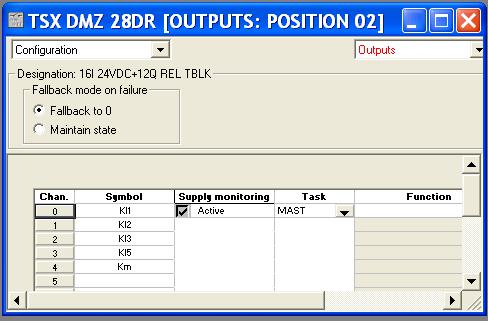
Після визначення схем підключення виконується конфігурування окремих модулів. На рис. 12-16 наведені вікна для конфігурації окремих модулів. Mast задача повинна бути періодичною.
Рис.12. Конфігурування процесорного модуля
Рис.13. Конфігурування модуля дискретних входів-виходів (входи)
vk.com/club152685050 | vk.com/id446425943
Рис.14. Конфігурування модуля дискретних входів-виходів (виходи)

vk.com/club152685050 | vk.com/id446425943
Рис.15. Конфігурування модуля аналогових входів
Рис.16. Конфігурування модуля аналогових виходів
vk.com/club152685050 | vk.com/id446425943
2.3 Розроблення прикладного програмного забезпечення для реалізації алгоритму керування
2.3.1. Розроблення програми користувача для МПК Ломіконт
Нижче наведений приклад можливої програми користувача на технологічній мові Мікрол для реалізації алгоритму управління.
Програма складається з ряду секцій у кожній з яких відбувається окремий етап управління процесом. У секції 000 відбувається приведення програми і положення виконавчих механізмів і відповідних регулюючих органів до початкового стану.
|
Секція 000 |
Коментар |
00 |
АЛГ 130 |
Закрити всі ключі блоків |
|
1. ВЫХОД = КБ0 |
|
|
2. №=8 |
|
|
3. В/О = ОТКЛ |
|
01 |
АЛГ 130 |
Закрити всі ключі секцій |
|
1. ВЫХОД = КС000 |
|
|
2. №=128 |
|
|
3. В/О = ОТКЛ |
|
02 |
О ДВ000 |
Закрити клапан подачі сировини - Кл1 |
03 |
О ДВ001 |
Закрити клапан подачі компонента №1- Кл2 |
04 |
О ДВ002 |
Закрити клапан подачі компонента №2- Кл3 |
05 |
В ДВ003 |
Відкрити клапан зливу – Кл5 |
06 |
О ДВ004 |
Відключити мішалку |
07 |
АВ000 |
Закрити клапан подачі пари – Кл4 |
|
=+0000 |
|
10 |
ТМ00 |
Обнулити таймер (одночасно |
|
=00.00.00 |
таймер вимкнути) |
11 |
В КБ1 |
Ввімкнути ключ блока КБ1 |
12 |
В КС100 |
Ввімкнути ключ секції КС100 |
|
Секція 100 |
Коментар |
00 |
ЕСЛИ В ВД001 |
Якщо натиснута. кнопка Пуск |
01 |
ТОГДА В ДВ010 |
Тоді включити проміжну змінну |
02 |
ЕСЛИ В ДВ010 |
Якщо включена проміжна змінна ДВ010 |
03 |
ЕСЛИ ВА000 |
Якщо рівень досяг нижнього значення |
|
=+0000 |
|
04 |
ТОГДА О ДВ003 |
Тоді закрити клапан зливу Кл5 |
05 |
ТОГДА В ДВ000 |
Тоді відкрити клапан подачі сировини Кл1 |
06 |
ТОГДА О КС100 |
Тоді вимкнути ключ секції КС100 |
07 |
ТОГДА В КС 101 |
Тоді ввімкнути ключ секції КС101 |
|
Секція 101 |
Коментар |
00 |
ЕСЛИ В ВД000 |
Якщо спрацював сигналізатор рівня |
01 |
ТОГДА О ДВ000 |
Тоді закрити клапан подачі сировини Кл1 |
02 |
ТОГДА В ДВ004 |
Тоді включити мішалку |
03 |
ТОГДА О ДВ010 |
Тоді відключити проміжну змінну ДВ010 |
04 |
ТОГДА О КС101 |
Тоді вимкнути ключ секції КС101 |
05 |
ТОГДА В КС 102 |
Тоді ввімкнути ключ секції КС102 |
vk.com/club152685050 | vk.com/id446425943
|
Секція 102 |
Коментар |
00 |
ЕСЛИ В ВД002 |
Якщо перемикачем SA вибрана продукція №1 |
01 |
ТОГДА В ДВ001 |
Тоді включити клапан подачі компоненту №1 |
02 |
ТОГДА АВ010 |
Тоді вибрати задане значення рівня – 80% |
|
=+0800 |
|
03 |
ТОГДА АВ011 |
Тоді вибрати задане значення температури – 70оС |
|
=+0583 |
|
04 |
ТОГДА О КС102 |
Тоді вимкнути ключ секції КС102 |
05 |
ТОГДА В КС 103 |
Тоді ввімкнути ключ секції КС103 |
06 |
ЕСЛИ В ВД003 |
Якщо перемикачем SA вибрана продукція №2 |
07 |
ТОГДА В ДВ002 |
Тоді включити клапан подачі компоненту №2 |
10 |
ТОГДА АВ010 |
Тоді вибрати задане значення рівня – 90% |
|
=+0900 |
|
11 |
ТОГДА АВ011 |
Тоді вибрати задане значення температури – 75оС |
|
=+0625 |
|
12 |
ТОГДА О КС102 |
Тоді вимкнути ключ секції КС102 |
13 |
ТОГДА В КС 103 |
Тоді ввімкнути ключ секції КС103 |
|
Секція 103 |
Коментар |
00 |
ЕСЛИ ВА000 |
Якщо рівень в апараті досяг заданого значення |
|
>+АВ010 |
|
01 |
ТОГДА О ДВ001 |
Тоді закрити клапан подачі компоненту №1- Кл2 |
02 |
ТОГДА О ДВ002 |
Тоді закрити клапан подачі компоненту №2- Кл3 |
03 |
ТОГДА АВ000 |
Тоді повністю відкрити клапан подачі пари – Кл4 |
|
=+1000 |
|
04 |
ТОГДА О КС103 |
Тоді вимкнути ключ секції КС103 |
05 |
ТОГДА В КС 104 |
Тоді ввімкнути ключ секції КС104 |
|
Секція 104 |
Коментар |
00 |
ЕСЛИ ВА001 |
Якщо температура досягла заданого значення |
|
>+АВ011 |
|
02 |
ТОГДА В ТМ00 |
Тоді включити таймер |
03 |
ТОГДА АВ012 |
Тоді визначити розузгодження |
|
= +ВА001 |
(розузгодження в секцію 105) |
|
-АВ011 |
|
04 |
ТОГДА О КС104 |
Тоді вимкнути ключ секції КС104 |
05 |
ТОГДА В КС 105 |
Тоді ввімкнути ключ секції КС105 |
|
Секція 105 |
Коментар |
00 |
АЛГ001 |
Включити регулятор температури |
|
1. ВХОД = +АВ012 |
|
|
2. ВЫХОД= АВ000 |
|
|
…….. |
|
01 |
ЕСЛИ ТМ00 |
Якщо термін часу (15 хвилин) вичерпався |
|
> 00.15.00 |
|
02 |
ТОГДА О ТМ00 |
Тоді відключити таймер |
03 |
ТОГДА АВ000 |
Тоді закрити клапан подачі пари Кл4 |
|
=+0000 |
|
04 |
ТОГДА В ДВ003 |
Тоді відкрити клапан зливу Кл5 |
05 |
ТОГДА О КС105 |
Тоді вимкнути ключ секції КС105 |
06 |
ТОГДА В КС 100 |
Тоді ввімкнути ключ секції КС100 – тобто підготуватись до |
|
|
нового робочого циклу |
vk.com/club152685050 | vk.com/id446425943
2.3.2 Розроблення програми користувача для МПК Реміконт-130
На рис. 9 наведений можливий варіант програми користувача для Реміконта-130 на мові функціональних блоків. На схемі окремі алгоритми зображені у вигляді прямокутників над яким вказано їх позначення у відповідності з бібліотекою алгоритмів. У верхній частині зліва вказується номер алгоблоку, куди записується алгоритм, справа – бібліотечний номер. У нижній частині зліва – модифікатор для даного алгоритму, справа – масштаб часу.
Для зв‘язку програми з сигналами зовнішніх пристроїв використані алгоритми інтерфейсного зв‘язку (ВДБ, ВАА, ДВБ, АВА), підключення до яких зовнішніх пристрої показано у відповідності до вище наведеної схеми підключення до Р-130.
Дискретні виходи і входи алгоритму ПЕР, записаного в алгоблок 25, підключені через алгоритм двохпозиційного управління УДП, для яких встановлений модифікатор 02. Тобто сигнал логічної одиниці (по передньому фронту) поданий на входи 01,02 викликає появу логічної одиниці на їх виході 01, сигнал логічної одиниці (по передньому фронту) поданий на входи 03,04 викликає появу логічного нуля на виході 01.
При розробці програми враховувалось наступне. Режими роботи установки залежать від положення перемикача SA. У положенні «1» перший компонент заповнює апарат до рівня 80%, а потім витримується температурний режим 70оС, а для положення «2» - другий компонент заповнює апарат до рівня 90% з температурним режимом - 75оС. Для врахування цього, до виходів 03 і 04 алгоритму ВДБ (05) (05 – номер алгоблоку) під‘єднані входи алгоритму перемикачів ПЕР (07) і ПЕР (08).
Програма працює наступним чином. Після натискання кнопки «Пуск» сигнал логічної 1 подається:
-на входи 03 алгоритмів УДП (17,18,19 і 21), що призводить до появи на виході 01 цих алгоритмів логічного 0. Ці виходи під‘єднані до відповідних входів алгоритму ДВБ (26) через які формуються управляючі сигнали на виході контролера і закривають клапани Кл1, Кл2, Кл3, Кл5 і відключають магнітний пускач КМ, який керує мішалкою;
-на вхід 01 алгоритму УДП (20), що призводить до появи логічної 1 на його виході, який під‘єднаний до входу 04 алгоритму ДВБ (26). Це призводить до відкриття Кл5;
-на входи алгоритмів УДП (22, 23, 24) за допомогою яких формуються управляючі сигнали на входах 02, 04, 06 алгоритму ПЕР (25). При натисканні кнопки «Пуск» логічна 1 з‘являється на виході алгоритму УДП (22), а на виходах алгоритмів УДП (23 і 24) формується логічний 0. Це забезпечує підключення до виходу 01 алгоритму ПРЕ (25) значення аналогової змінної, яке записано на вході 01, тобто «0». Цей сигнал передається на вхід алгоритму АВА (27) і відповідно повністю закриває Кл4.
vk.com/club152685050 | vk.com/id446425943
Рис. 9. Програма користувача для МПК Реміконт-130
vk.com/club152685050 | vk.com/id446425943
-на вхід 01 алгоритму ТРИ (10), для того щоб сигнал логічної 1 зберігся на виході цього алгоритму після того як відпустити кнопку «Пуск»
Подальша робота програми залежить від значення сигналу, який подається з рівнеміра LT на вхід алгоблоку ВАА (06). Сигнал з виходу 01 цього алгоритму подається на входи алгоритму ПОР (09). Цей алгоритм має модифікацію 03, тобто вміщує 3 незалежних порогових елемента. У кожному пороговому елементі різниця між сигналами , які подаються на перші його два входи з значенням,яке подається на третій вхід. Перший пороговий елемент визначає момент досягнення значення рівня 0%. Другий елемент – момент досягнення рівня заданого рівня, значення якого поступає з виходів алгоблоку ПЕР (07), який керується сигналами з перемикача SA.
Таким чином, якщо в апараті залишається залишок рідини, на виході алгоритму 01 ПОР (09) є сигнал логічного 0 і стан виконавчих механізмів не змінюється і рідина через Кл5 виливається з апарату. Як тільки рідина повністю залишить апарат, на цьому виході з‘явиться логічна 1, яка подається на вхід 02 алгоритму ЛОИ (11) на вході 01 якого є сигнал логічної 1 з алгоритму ТРИ. На виході 01 алгоритму ЛОИ (11) з‘являється логічна 1 яка подається:
-на вхід 01 алгоритму УДП (17). На виході цього з‘являється логічна одиниця яка через вхід 01 алгоритму ДВБ (26) відкриває Кл 1 і сировина починає поступати в апарат;
-на вхід 03 алгоритму УДП (20). На виході цього з‘являється логічний 0. Це через вхід 04 алгоритму ДВБ (26) закриває Кл 5.
Як тільки рівень в апараті досягне значення, яке контролюється сигналізатором рівня LE, на виході 01 алгоритму ВДБ (05) з‘являється логічна 1 яка подається:
-на вхід 03 алгоритму УДП (17) вихід якого переходить у стан логічного 0, що призводить до відключення Кл1;
-на вхід 01 алгоритму УДП (21) вихід якого переходить у стан логічного 0, що призводить до включення мішалки через КМ;
-на входи 01 алгоритмів ЛОИ (12 і 13). Подальша робота залежить від положення перемикача виду продукції. Якщо перемикач знаходиться у положенні «1», сигнал логічної 1 подається на вхід 02 алгоритму ЛОИ (12). Вихід цього алгоритму підключений до входу 01 алгоритму УДП (18), логічна 1 на якому включає Кл2 і забезпечує подачу в апарат компоненту №1. Якщо перемикач знаходиться у положенні «2», сигнал логічної 1 подається на вхід 02 алгоритму ЛОИ (13). Вихід цього алгоритму підключений до входу 01 алгоритму УДП (19), логічна 1 на якому включає Кл2 і забезпечує подачу в апарат компоненту №2;
-На вхід 02 алгоритму ТРИ (10), який скидає тригер.
Починається наповнення апарату компонентом №1 або №2. Як тільки рівень в апараті досягне заданого значення яке залежить від положення перемикача SA і подається з виходу 01 алгоритму ПЕР (07) на вхід 07 алгоритму ПОР (09). Як
vk.com/club152685050 | vk.com/id446425943
тільки рівень досягне заданого значення (80% або 90%) на виході 02 з‘являється логічна 1 і яка подається на:
-входи 04 алгоритмів УДП (18 і 19), через виходи яких закриваються клапан Кл2 і Кл3;
-входи 03 алгоритму УДП (22) і 01 алгоритму УДП (24). Через виходи цього алгоритму змінюється комбінація сигналів на управляючих входах алгоритму ПЕР (25). А саме на вході 03 цього алгоритму з‘являється логічний 0, а на вході 06 – логічна 1. Тобто на виході цього алгоритму з‘являється сигнал 100, що через алгоритм АВА (27) повністю відкриває
клапан Кл4.
Починається підігрів рідини. Як тільки температура в апараті досягне заданого значення яке залежить від положення перемикача SA і подається з виходу 01 алгоритму ПЕР (08) на вхід 11 алгоритму ПОР (09). Як тільки температура досягне заданого значення (70оС або 75 оС, що відповідає значенням 58,3 і 62,5 для діапазону 0-120оС) на виході 03 з‘являється логічна 1 і яка подається на:
-входи 04 алгоритму УДП (24) і 01 алгоритму УДП (23). Через виходи цього алгоритму змінюється комбінація сигналів на управляючих входах алгоритму ПЕР (25). А саме на вході 06 цього алгоритму з‘являється логічний 0, а на вході 04 – логічна 1. Тобто на вихід цього алгоритму буде подаватись сигнал з регулятора температури, який подається на вхід 03 з виходу алгоритму РУЧ(16), який під‘єднаний до алгоритму регулятора аналогового РАН (15). Це дозволить керувати клапаном Кл4 регулятором температури.
-на входи 01 і 02 (з інверсією) алгоритму таймера ТМР (14). Таймер запускається.
Починається витримка часу. Коли час, встановлений на вході 03 алгоритму (з врахуванням масштабу часу алгоритму), вичерпався на виході 01 з‘являється логічна 1 яка подається:
-на входи 04 алгоритму УДП (23) і 02 алгоритму УДП (22). Через виходи цього алгоритму змінюється комбінація сигналів на управляючих входах алгоритму ПЕР (25). А саме на вході 06 цього алгоритму з‘являється логічний 0, а на вході 02 – логічна 1. Тобто на вихід цього алгоритму буде подаватись сигнал 0, що через алгоритм АВА (27) повністю закриє клапан Кл4;
-на вхід 02 УДП (20), через вихід якого відкриється клапан Кл5.
Цикл роботи закінчився.
При складанні програми необхідно уважно вивчати описи бібліотечних алгоритмів, які наведені у навчальному посібнику [1, сторінки 117-141] та у конспекті лекцій [2, сторінки 53-73]. Крім того, крос-система для програмування Р-130 має повну бібліотеку алгоритмів.

vk.com/club152685050 | vk.com/id446425943
2.3.3Розроблення програми користувача для МПК TSX Micro
2.3.3.1.Приклад програми користувача на мові Grafset
Всучасних ПЛК прийнято прив’язувати зовнішні змінні до внутрішніх з метою зручності роботи при відладці програми та з засобами людино-машинного інтерфейсу (SCADA/HMI). Це дає наступні переваги:
- при підключенні датчиків/ВМ до інших фізичних каналів, наприклад при їх відмові, зміни проводяться тільки в одному місті програми;
- змінні для обміну з засобами ЛМІ можна групувати разом для зменшення навантаження на комунікаційні ресурси;
Таким чином на початку програми користувача в ПЛК проміжним внутрішнім змінним присвоюють значення вхідних змінних, а в кінці – вихідним змінним присвоюють значення проміжних внутрішніх. Таким чином для сигналів
зтаблиці 2 можна використати наступні проміжні змінні:
Таблиця 3. Відповідність проміжних змінних адресам входів-виходів МПК TSX Micro
Вхідні сигнали
Джерело сигналу |
Адреса вх |
Проміжна |
Символьна |
|
|
змінна |
назва |
Сигналізатор рівня |
%I1.0 |
%M10 |
L_a |
Кнопка «ПУСК» |
%I1.1 |
%M11 |
Pusk |
Перемикач вибору продукції: - продукт №1 |
%I1.2 |
%M12 |
Produkt_1 |
- продукт №2 |
%I1.3 |
%M13 |
Produkt_2 |
Датчик рівня (аналоговий) |
%IW3.0 |
%MW30 |
L_aparat |
Датчик температури |
%IW3.1 |
%MW31 |
Temperat |
Вихідні сигнали |
|
|
|
Виконавчий пристрій |
Адреса |
Проміжна |
Символьна |
|
вих |
змінна |
назва |
Магнітний пускач двигуна мішалки |
%Q2.4 |
%M24 |
Mishalka |
Клапана подачі сировини (дискретний) |
%Q2.0 |
%M20 |
Klapan_syrovyna |
Клапана зливу (дискретний) |
%Q2.3 |
%M23 |
Klapana_zlyv |
Клапана подачі компоненту 1 (дискретний) |
%Q2.1 |
%M21 |
Klapan_komp1 |
Клапана подачі компоненту 2 (дискретний) |
%Q2.2 |
%M22 |
Klapan_komp2 |
Клапана подачі пари (аналоговий) |
%QW4.0 |
%MW40 |
Klapan_para |
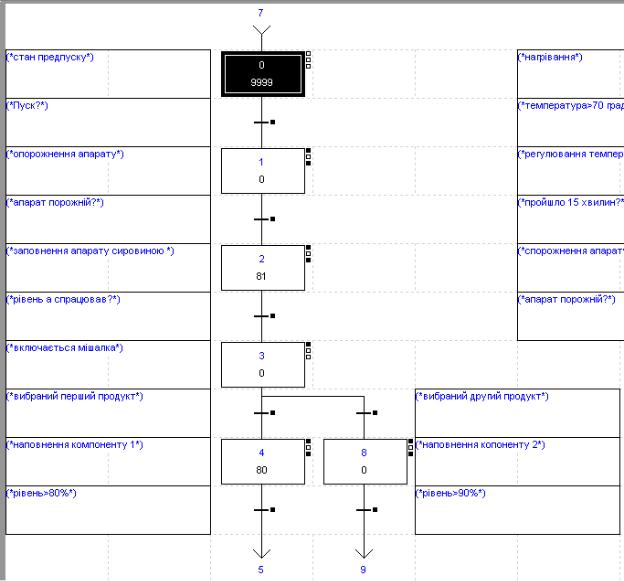
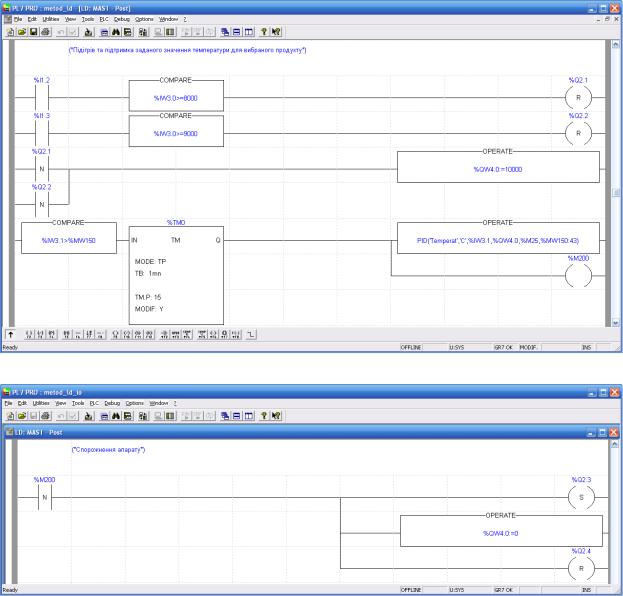
Приклад програми користувача написаної на мові Grafcet показаний на рис.17-18 та лістингах коду в переходах та кроках (STEP), який наведений в таблиці 4. Це основна програма (CHART), де виконується вся необхідна послідовність дій. В Prl-обробці приводиться переприсвоєння значення вхідних змінних проміжним змінним із таблиці 3, а Post-обробці – навпаки, переприсвоєння значень проміжних змінних вихідним.
Лістинг коду, написаного в Prl.
L_a:=%I1.0; Pusk:=%I1.1;
vk.com/club152685050 | vk.com/id446425943
Produkt_1:=%I1.2;
Produkt_2:=%I1.3;
L_aparat:=%IW3.0;
Temperat:=%IW3.1;
Лістинг коду, написаного в Post.
%Q2.4:=%M24;
%Q2.0:=%M20;
%Q2.3:=%M23;
%Q2.1:=%M21;
%Q2.2:=%M22;
%QW4.0:=%MW40;
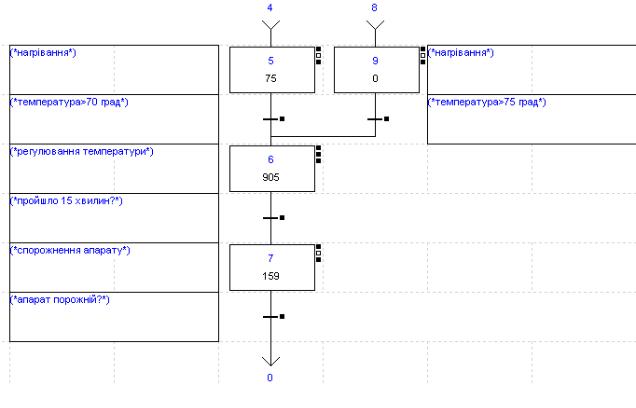
Рис.17. Структура програми на мові Grafcet.
Лістинг програми на Grafcet необхідно оформляти таким чином, щоб було зрозуміло наповнення кожного кроку та умови переходу. Один із варіантів такого представлення продемонстрований в таблиці 4. Лістинг умови переходу починаються зі слова ПЕРЕХІД (x-y), де x та y - номери кроків відповідно з якого на який проходить перехід. Кроки починаються зі слова STEP N , де N – номер кроку. Кожний крок може складатися з трьох програм P1 (при активації), N1 (коли активний) та P0 (при деактивації), які обрамляються відповідними словами ACTION та END_ACTION. Слід зазначити, що табличне представлення програми
vk.com/club152685050 | vk.com/id446425943
є необов’язковим, а позначення кроків та умов переходів може проводитись довільним чином, однак за умови повної визначеності складу програми.
Рис.18. Структура програми на мові Grafcet (продовження).
|
|
Таблиця 4. Лістинг коду для Grafcet CHART. |
|
ПЕРЕХІД(0-1) |
STEP 1 |
STEP 6 |
|
%M11 |
ACTION (P1) |
ACTION (P1) |
|
|
SET %M23; |
START %TM0; |
|
ПЕРЕХІД(1-2) |
END_ACTION |
END_ACTION |
|
%MW30<50 |
ACTION (P0) |
ACTION (N1) |
|
|
RESET %M23; |
PID('Temperat','C',%MW31,%MW40,%M25,%MW150:43); |
|
ПЕРЕХІД (2-3) |
END_ACTION |
END_ACTION |
|
%M10 |
STEP 2 |
ACTION (P0) |
|
|
ACTION (P1) |
%MW40:=0;DOWN %TM0; |
|
ПЕРЕХІД(3-4) |
SET %M20; |
END_ACTION |
|
%M12 |
END_ACTION |
|
|
STEP 7 |
|
||
|
|
|
|
|
ACTION (P0) |
ACTION (P1) |
|
ПЕРЕХІД(4-5) |
RESET %M20; |
|
|
SET %M23; |
|
||
%MW30>8000 |
|
|
|
END_ACTION |
END_ACTION |
|
|
|
|
|
|
|
STEP 3 |
ACTION (P0) |
|
ПЕРЕХІД(5-6) |
|
|
|
ACTION (P1) |
RESET %M23; |
|
|
%MW31>5833 |
SET %M24; |
RESET %M24; |
|
|
|
|
|
ПЕРЕХІД(6-7) |
END_ACTION |
END_ACTION |
|
|
|
|
|
STEP 4 |
STEP 8 |
|
|
%TM0.V>90 |
|
||
ACTION (P1) |
ACTION (P1) |
|
|
|
|
||
ПЕРЕХІД(7-0) |
SET %M21; |
SET %M22; |
|
END_ACTION |
END_ACTION |
|
|
%MW30<100 |
|
||
ACTION (P0) |
ACTION (P0) |
|
|
|
|
||
ПЕРЕХІД(3-8) |
RESET %M21; |
RESET %M22; |
|
END_ACTION |
END_ACTION |
|
|
%M13 |
|
||
|
STEP 9 |
|
|
|
|
|
|
|
|
|
|
vk.com/club152685050 | vk.com/id446425943
|
STEP 5 |
ACTION (P1) |
%MW40:=10000; |
ПЕРЕХІД(8-9) |
ACTION (P1) |
END_ACTION |
|
%MW30>9000 |
%MW40:=10000; |
ACTION (P0) |
%MW150:=6250; |
|
END_ACTION |
END_ACTION |
|
ПЕРЕХІД (9-6) |
ACTION (P0) |
|
|
%MW31>6250 |
%MW150:=5833; |
|
|
|
END_ACTION |
|
|
|
|
|
|
В програмі використані символьні позначення, які наведені в таблиці 5. Таблиця 5.
|
Символьне |
Тип |
|
Змінна |
позначення |
змінної |
Коментар |
%MW30 |
L_aparat |
WORD |
Рівень в апараті |
%MW31 |
Temperat |
WORD |
Температура в апараті |
%MW40 |
Klapan_para |
WORD |
Клапан подачі пари |
%MW150 |
Temper_sp |
WORD |
Задане значення температури |
%MW151 |
Out_man |
WORD |
Ручне завдання на вихід ВМ |
%MW152 |
Kp |
WORD |
коефіцієнт пропорційності |
%MW153 |
Ti |
WORD |
Ті |
%MW154 |
Td |
WORD |
Тд |
%MW156 |
Out_max |
WORD |
Обмеження виходу по максимуму |
%MW157 |
Out_min |
WORD |
Обмеження виходу по мінімуму |
%M10 |
L_a |
EBOOL |
Сигналізатор рівня |
%M11 |
Pusk |
EBOOL |
Кнопка пуск |
%M12 |
Produkt_1 |
EBOOL |
Виібр першого продукту |
%M13 |
Produkt_2 |
EBOOL |
Виібр другого продукту |
%M20 |
Klapan_syrovyna |
EBOOL |
Клапан подачі сировини |
%M21 |
Klapan_komp1 |
EBOOL |
Клапан подачі першого компоненту |
%M22 |
Klapan_komp2 |
EBOOL |
Клапан подачі другого компоненту |
%M23 |
Klapan_zlyv |
EBOOL |
Клапан зливу |
%M24 |
Mishalka |
EBOOL |
Двигун мішалки |
|
|
|
Перемикач ручний/автомат для регулятору |
%M25 |
Auto_man |
EBOOL |
температури |
%TM0 |
|
TM |
Таймер на витримку (TON,1 S,900,YES) |
Прокоментуємо деякі моменти в наведеній програмі.
В залежності від вибраного режиму, програма піде по одній із альтернативних гілок: крок 4 або 8.
Значення заданих температур для різних режимів та компонентів відповідно дорівнюють 5833 од. контролера для першого режиму та 6250 од. для другого режиму, оскільки налаштування діапазону для відповідного входу дорівнює від 0- 10000 од. контролеру. В кроці 6 проводиться регулювання температури для обох режимів, однак завдання регулятору задається в кроці 5 (Р0) для першого режиму та 9 (Р0) для другого. Слід зазначити, що перехід регулятору в автоматичний режим програмно не робиться, тому при відладці програми необхідно це зробити вручну, наприклад з таблиці анімацій (на практиці не рекомендується переводити регулятор в автоматичний режим та навпаки програмним шляхом, оскільки це прерогатива оператора). Коефіцієнти настройки Кр, Ті та Тд теж проводиться вручну при відладці програми.
vk.com/club152685050 | vk.com/id446425943
В програмі використаний секундний таймер, з уставкою 900 (900с/60с=15 хв). Однак умова переходу 6-7 є досягнення плинного значення 90с. Це зроблено штучно, для скорочення часу відладки.
При закінченні загального циклу роботи установки, маркер Grafcet знову переходить на нульовий крок ініціалізації.
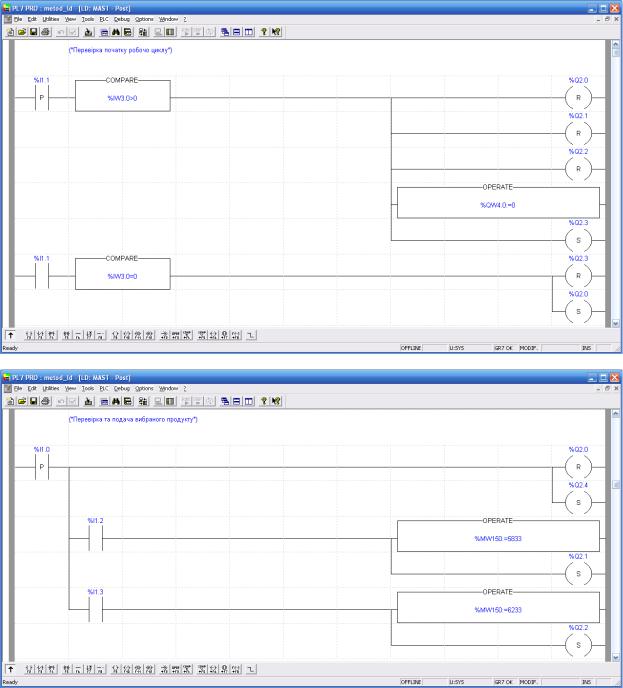
2.3.3.2. Приклад програми користувача на мові Ladder Diagram
vk.com/club152685050 | vk.com/id446425943
2.4. Відлагодження програми користувача для МПК TSX Micro
2.4.1. Загальні принципи.
Відлагодження програми бажано проводити в три етапи:
-перед впровадженням на об’єкт;
-доводка програми на об’єкті перед пуском установки;
-доводка програми на об’єкті в режимі експлуатації.
Перший етап дає змогу максимально наблизити програму до робочого стану ще на етапі проектних робіт. Відсутність робочого об’єкту вимагає від розробника ПЗ імітації сигналів від датчиків, відповідно до умов функціонування цього об’єкту. Розробник чітко повинен уявляти як працює об’єкт, для того щоб імітувати сигнали в правильній послідовності та діапазонах сигналу. Так, наприклад, типовою помилкою є імітація спрацювання верхніх датчиків рівня при наборі перед нижніми, адже рівень набирається поступово.
В крос-системі Мікрол або на Пульті Ломіконта, імітація зовнішніх входів проводиться шляхом блокування відповідних зовнішніх змінних (ВА, ВД) та
vk.com/club152685050 | vk.com/id446425943
завдання їм необхідного (імітованого) значення. Правильність роботи відслідковується по зміні відповідних вихідних змінних (АВ, ДВ) та технологічних повідомлень.
В середовище PL7 PRO для відладки використовують таблиці анімації або/та засіб Runtime Screener. Принципи імітації аналогічні як в Мікрол, однак замість блокування зовнішніх входів проводиться їх форсування. Інколи у розробника є можливість імітувати сигнали підключивши до ПЛК зовнішні імітатори:
-вимикачі або перемикачі;
-задавачі струму або напруги;
-резистори змінного опору тощо.
Такі засоби дають можливість перевірити не тільки роботу програми але і повністю обчислювальний канал.
Інколи у розробника немає можливості використати необхідні модулі входів/виходів, що приводить до неможливості форсування та зміни вхідних змінних. В цьому випадку частину програми переприв’язки змінних (див. таб.3) можна виділити як коментар, тим самим вилучити з робочого циклу програми, і імітувати значення тільки проміжних змінних.
2.4.2. Використання програм імітації.
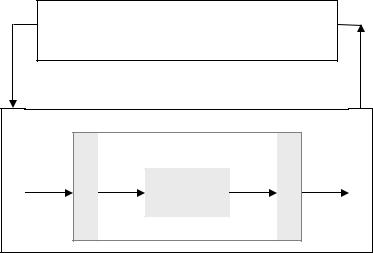
Для зручності відладки програми на етапі розробки, інколи пишуть підпрограми імітації об’єкту в самому ПЛК. Таким чином структура системи з імітацією порівняно зі структурою без неї (рис.19) буде мати вигляд як на рис.20.
Як видно з рисунку 20, з існуючої програми видаляється (позначається як коментар) частина, яка відповідає за пере присвоєння входів та виходів проміжним змінним, що дає змогу відв’язати програму користувача від зовнішніх змінних. Це ще один аргумент на користь підходу запропонованого вище, щодо переприсвоєння.
|
|
|
Об’єкт управління |
|
|
|||
сигнал від датчиків |
|
|
|
|
сигнал на ВМ |
|||
|
|
|
|
ПЛК |
|
|
|
|
|
|
переприсвоєння |
|
програма в ПЛК |
|
переприсвоєння |
%Q |
|
|
%I |
%M |
|
%M |
||||
|
|
%QW |
||||||
|
|
програма |
|
|||||
|
|
|
|
|||||
вхіднімодулі |
%IW |
%MW |
%MW |
вихіднімодулі |
||||
алгоритму |
||||||||
|
|
|||||||
|
|
|
||||||
|
|
управління |
|
|||||
|
|
|
|
|||||
|
Рис.19. Структура системи управління з реальним об’єктом. |
|||||||
vk.com/club152685050 | vk.com/id446425943
|
ПЛК |
|
|
програма в ПЛК |
|
||
програма-імітатор |
|||
об’єкту управління |
|||
внутрішні змінні - |
внутрішні змінні - |
||
імітація сигналу від |
|||
|
сигнал на ВМ |
||
датчиків |
|
||
|
|
||
%M |
|
%M |
|
%MW |
програма |
%MW |
|
алгоритму |
|||
|
|
||
|
управління |
|
|
Рис.20. Структура системи управління з програмною імітацією об’єкту.
В межах контролеру створюється частина програми, яка імітує роботу об’єкту управління. Внутрішні проміжні змінні, які відповідають за ВМ використовуються в програмі-імітаторі в якості вхідних значень, а які відповідають за датчики – в якості вихідних. Така структура дозволяє в будь-який момент відмовитись від імітації об’єкту, шляхом повернення коду пере присвоєння, та видалення коду (або його коментування) імітації об’єкту.
2.4.3. Алгоритми імітації.
Розглянемо декілька способів імітації деяких типових процесів.
В зв’язку з дискретністю по часу роботи контролера, є сенс алгоритми імітації викликати з певними проміжками часу (наприклад по таймеру). Це дасть змогу налаштувати необхідну швидкість (інерційність) процесу імітації. В процесах, залежних від попереднього стану, необхідно його враховувати. Тому при наступному перерахунку імітаційної величини використовується її попереднє значення. Тому в усіх прикладах будемо користуватися індексами П – для попереднього значення та Т – для теперішнього.
Для імітації рівня в залежності від відкриття трьох клапанів наборів та трьох зливів можна використати таку формулу:
LT |
: LП |
K1 FН1 K2 FН 2 K3 FН 3 ... |
K4 FЗ 4 K5 FЗ5 |
K6 FЗ6 .... |
(1) |
|
де |
LT , LП |
- відповідно плинний та попередній рівні; |
|
|
||
K1 |
... |
К6 - |
коефіцієнти які визначають умовний діаметр труб наповнення та |
|||
зливу;
FН 1...FН 3 - ступені відкриття регулюючих органів на набір;
FЗ 4 ...FЗ 6 - ступені відкриття регулюючих органів на злив.
При використанні двопозиційних ВМ (закрито, відкрито), (1) можна перетворити до наступного вигляду:
L |
: L |
П |
K |
1 |
K |
2 |
K |
3 |
K |
4 |
K |
5 |
K |
6 |
T |
|
|
|
|
|
|
|
де для K1...K6 справджується наступна рівність
0, коли _ ВМ _ закритий
K1 const, коли _ ВМ _ відкритий
(2)
(3)
Значення константи вибирається в залежності від діаметру трубопроводу.
vk.com/club152685050 | vk.com/id446425943
Рівень не може перевищувати 100% і бути менше 0%, тому доречно на значення рівня покласти обмеження по мінімуму та максимуму.
Для імітації спрацювання сигналізатору рівня (AL) можна використати плинне значення рівня, порівнявши його з константою (LSP), тобто:
true, L |
L |
||
AL |
T |
|
SP |
|
|
|
|
|
|
|
L |
false, L |
|||
|
|
T |
SP |
(4)
Для імітації температури в апараті, який підігрівається теплоагентом, можна використати наступну залежність:
|
|
T : T |
П |
K |
1 |
F |
K |
2 |
Z K |
3 |
|
|
T |
|
P |
|
|
||||
де |
TT ,TП |
- відповідно плинна та попередні температури, |
||||||||
відкриття регулюючого органу теплоагенту, |
Z - збурення, K1 , K2 , K3 - |
|||||||||
|
(5) |
FP |
- ступінь |
передаточні
коефіцієнти.
Передаточними коефіцієнтами з (5) настроюється інерційність об’єкту, та передаточні характеристики по каналам управління та збурення. Аналізуючи наведений об’єкт та формулу (5) можна прийти до приблизних оцінок значень коефіцієнтів. Коли збурення та управління дорівнюють нулю ( FP 0, Z 0 ), то температура повинна падати внаслідок охолодження під дією, будемо вважати, прогнозованого збурення. Таким чином коефіцієнт K1 повинен бути менше, однак
близько до значення 1. Чим більше
тим повільніше йде охолодження. |
K |
коефіцієнт і періодичність перерахунку (5) 2 повинен бути вище K 3 , оскільки по каналу
управління |
коефіцієнт передачі |
повинен бути вище, ніж у збурення. |
Величина K 2 |
визначає як впливає відкриття РО теплоагенту на температуру. |
|
Враховуючи, що в TSX Micro/Premium всі величини задаються в |
||
діапазонних значеннях (0-10000) |
то сума всіх коефіцієнтів в (5) повинна |
|
дорівнювати одиниці. |
|
|
Якщо необхідно використати аналогічний об’єкт з охолодженням, то в (5) другий доданок йде зі знаком мінус.
Слід зазначити, що наведені приклади є не обов’язковими для використання
вкурсовому проектуванні. Імітація об’єкту може проводитись іншими способами.
2.4.4.Приклад імітації.
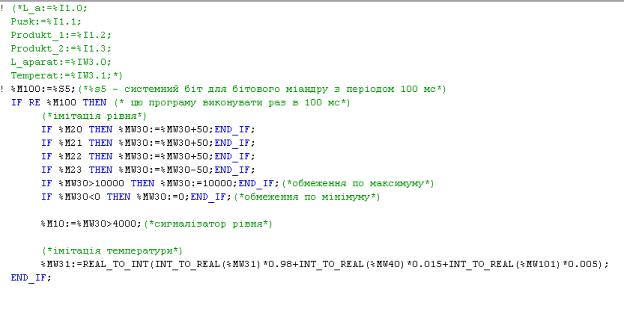
Рис.21. Фрагмент програми імітацієї об’єкту.

vk.com/club152685050 | vk.com/id446425943
Як видно з прикладу частина програми пере присвоєння закоментована, натомість замість неї використовується підпрограма імітації. Ця підпрограма викликається раз в 100 мс, що реалізовується з використанням спеціального системного біту %S5, який перекидається в протилежний стан раз в 50 мс, тобто організовує бітовий меандр з періодичністю 100 мс. Таким чином по передньому
фронту від стану %S5 запускається підпрограма імітації. |
|
|
||||
|
Рівень імітується за формулою (2), де константи вибрані рівними 50. При |
|||||
необхідності змінити швидкість набору/зливу їх можна коригувати. |
|
|||||
|
Сигналізатор рівня спрацьовує при перевищенні рівня 40%, по формулі (4). |
|||||
|
Температура |
імітується |
за |
формулою |
(5). |
Коефіцієнти |
K1 |
0.98, K2 0.015, K3 |
0.005 . Їх значення можна змінювати, |
однак сума повинна |
|||
дорівнювати 1. Для перемноження цілих значень на дійсне використовується функція перетворення типів цілого в дійсне INT_TO_REAL. Для запису результату в ціле значення – зворотна функція перетворення типів
REAL_TO_INT.
Для зручності відладки можна скористатися засобами RuntimeScreen, приклад для якого зображений на рис.22.
Рис.22. Копія екрану відладочного засобу RuntimeScreen.

vk.com/club152685050 | vk.com/id446425943
2.5 Розрахунок надійності спроектованої системи
Розрахунок надійності системи необхідно виконати двома методами,
вважаючи її відновлюваною та невідновлюваною. Дані, необхідні для розрахунку вибрані з технічних характеристик приладів та приведені в таблиці 4.1.
Таблиця 4.1 – Вихідні дані для розрахунку надійності системи
№ |
|
Наробка |
Інтенсивність |
Час |
Інтенсивність |
|
Назва приладу |
до відмови |
відмови |
відновлення |
відновлення |
||
п/п |
||||||
|
t, год |
λ=1/t, 1/год |
tв, год |
μ=1/tв, 1/год |
||
|
|
|||||
|
|
|
|
|
|
|
1 |
ТСМ 100М |
200 000 |
0,5·10-6 |
8 |
0,125 |
|
|
|
|
|
|
|
|
2 |
Modicon M340 |
50 000 |
2·10-5 |
5 |
0,2 |
|
|
|
|
|
|
|
|
3 |
HoneyWell Eclipse |
100 000 |
1·10-5 |
4 |
0,25 |
|
|
|
|
|
|
|
|
4 |
Метран-350 |
100 000 |
1·10-5 |
3 |
0,33 |
|
|
|
|
|
|
|
|
5 |
EMERSON 1035 |
150 000 |
6,67·10-6 |
4 |
0,25 |
|
|
|
|
|
|
|
Розрахунок надійності системи здійснено за допомогою програмного пакету
MathCAD та подано нижче.
Розрахунок надійності системи, яка вважається невідновлюваною
Наробка до відмови і-го елементу системи, год:
i 1 5 ti
200000
50000
100000
100000
150000
Інтенсивність відмови системи, 1/год:
Ймовірність безвідмовної роботи системи напротязі 2000 год:
Час безвідмовної роботи системи, год:
Частота відмови системи напротязі 2000 год,1/год:
Інтенсивність відмови і-го елементу системи,1/год:
|
|
|
1 |
|
|
|
||
i |
|
|
|
|
|
|||
|
|
t |
|
|
|
i |
|
|
|
|
|
i |
5·10 |
-6 |
|||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2·10 |
-5 |
|
|
|
|
|
|
|
1·10 |
-5 |
|
|
|
|
|
|
|
1·10 |
-5 |
|
|
|
|
|
|
|
6.667·10 |
-6 |
|
c i |
c 5.167 10 5 |
||||||
|
|
|
|
|
i |
|
|
|
|
Pc(t) e c t |
Pc(2000) 0.902 |
||||||
|
T |
|
1 |
|
T 1.935 104 |
|||
|
|
c |
||||||
|
|
|
|
|
|
|
||
|
(t) c Pc(t) |
(2000) 4.659 10 5 |
||||||
vk.com/club152685050 | vk.com/id446425943
Розрахунок надійності системи, вважаючи її відновлюваною
Розрахунок надійності систем керування
Логічна схема розрахунку надійності включає такі послідовно з"єднані пристрої:
Тип обладнання |
Інтенсивність |
Інтенсивність |
|
відмови. 1/год |
відновлення, 1/год |
_______________________________________________________________________ |
||
TCM 100M
|
6 |
0.5 10 |
|
0 |
|
|
0 |
0.125 |
|
|
ModiconM340
HoneyWell Eclipse
Метран-350
Emerson 1035
|
5 |
2 10 |
|
1 |
|
|
5 |
1 10 |
|
2 |
|
|
5 |
1 10 |
|
3 |
|
|
6 |
6.67 10 |
|
4 |
|
|
1 |
0.2 |
|
|
|
|
2 |
0.25 |
|
|
|
|
3 |
0.33 |
|
|
|
|
4 |
0.25 |
|
|
Розрахунок надійності відновлювальної системи без резервуання
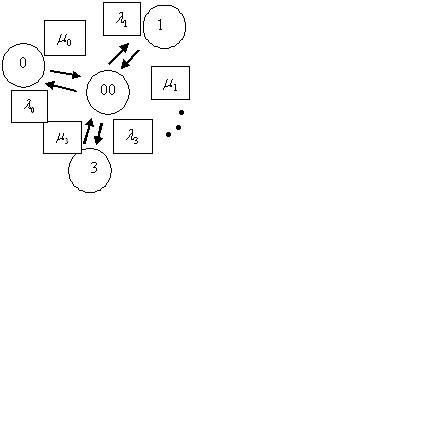
Граф системи представлений на рисунку. Роботоздатними системами є 00
Система диференційних рівнянь , що описуєнадійність роботи розглянутої системи поданої у перетвореннях Лапласа буде такою
0 p00 0 p0 |
|
s p0 |
|||||
|
|||||||
|
|||||||
1 p00 1 p1 |
|
s p1 |
|||||
|
|||||||
|
|||||||
2 p00 2 p2 |
|
s p2 |
|||||
|
|||||||
|
|||||||
p |
00 |
|
p |
3 |
|
s p |
3 |
3 |
|
3 |
|
|
|||
p |
00 |
|
p |
4 |
|
s p |
4 |
4 |
|
4 |
|
|
|||
А також добавимо балансне рівняння
p |
00 |
p |
0 |
p |
1 |
p |
2 |
p |
3 |
p |
4 |
1 |
|
|
|
|
|
|
|
Прирівнявши члени з похідними до нуля (s=0) , одержимо систему яка описує усталені значення ймовірностей перебування системи у відповідних станах. Розв'яжимо дану систему рівнянь
Given |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
p |
00 |
|
p |
0 |
0 |
||||||||||
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|||||
p |
00 |
p |
0 |
p |
1 |
p |
2 |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||
0 |
|
|
|
|
p |
00 |
|
p |
1 |
|||||||
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|||||
p00 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p0 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
p |
1 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Find p00 |
||||||||||||
|
|
p2 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
p3 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p4 |
|
|
|
|
|
|
|
|
|
|
||||
p |
3 |
1 |
|
|
p0 p1 p2
p |
00 |
|
p |
2 |
0 |
|
|
2 |
|
2 |
|
|
|
||
p |
00 |
|
p |
3 |
0 |
|
|
3 |
|
3 |
|
|
|
||
p |
00 |
|
p |
4 |
0 |
|
|
4 |
|
4 |
|
|
|
||
|
|
|
|
|
|
.9998 |
|
|
|
|
|
3.999 10-6 |
|
||
|
|
|
|
|
|||
|
|
|
|
|
|
-5 |
|
p3 p4 float 4 |
|
|
9.998 10 |
|
|||
|
3.999 10-5 |
|
|||||
|
|
|
|
|
|||
|
|
|
|
|
|
-5 |
|
|
|
|
|
3.030 10 |
|
||
|
|
|
|
|
|
-5 |
|
|
|
|
|
2.668 10 |
|
||

vk.com/club152685050 | vk.com/id446425943
Тоді отримаємо:
Тоді коефіцієнт готовності
K |
p |
00 |
z |
|
|
K |
0.9998 |
|
z |
|
|
Коефіційієнт потоку відмов
0 1 2 3 3 p00
5.049 10 5
Середня наробка до відмови складає, год
|
|
|
K |
|
T |
|
|
z |
|
cep |
|
|||
|
|
|||
|
|
|
T |
4 |
1.98 10 |
|
cep |
|
Розрахунок надійності системи дав такі результати:
-для невідновлюваної системи інтенсивність відмов λсис=5.167·10-5 1/год;
-частота відмови системи на протязі 2000 год (2000)=4.659·10-5;
-для відновлюваної системи середня наробка до першої відмови 1.98·104 год.
Отже, розроблена система автоматичного керування є достатньо надійною
та придатною для експлуатації.
У разі якщо Р(t) ≤0.8 при t=2000год. необхідно вжити заходів для підвищення надійності системи шляхом резервування найненадійніших елементів системи. Тоді знову зробити перерахунок.
3.ЛІТЕРАТУРА
1.Ельперін І.В. Промислові контролери: Навч.посіб. – К.: НУХТ, 2003. –
320 с.
2.Ельперін І.В. Промислові контролери. Частина 1.: Конспект лекцій до вивчення дисц. Для студ. Спец. 6.092500 «автоматизоване управління технологічними процесами» і «Комп‘ютерно-інтегровані технологічні процеси і виробництва» напряму підготовки 0925 «Автоматизація і комп‘ютерноінтегровані технології». – К.: НУХТ, 2007. – 84 с.
3.Ельперін І.В. Промислові контролери. Частина 2.: Конспект лекцій до вивчення дисц. Для студ. Спец. 6.092500 «автоматизоване управління технологічними процесами» і «Комп‘ютерно-інтегровані технологічні процеси і виробництва» напряму підготовки 0925 «Автоматизація і комп‘ютерноінтегровані технології». – К.: НУХТ, 2007. – 84 с.
4.Мікропроцесорні пристрої і системи управління в харчовій промисловості: Навч. Посібник /І.В.Ельперін, Є.Л.Календро, А.П.Ладанюк. -К.:
ІСДО, 1994. - 140 с.
5.Мікропроцесорні та програмні засоби автоматизації: Метод. вказівки до
виконання курс. проекту для студ. спец. 6.092501 “Автоматизоване управління
vk.com/club152685050 | vk.com/id446425943
технологнічними процесами” та 6.092502 “Комп‘ю-терно-інтегровані технологічні процеси та виробництва”ден. та заоч .форм навчання / Уклад.: І.В.Ельперін, В.М.Кушков, Г.В.Кабальський. – К.: УДУХТ, 2001. – 16 с.
6. Мікропроцесорні пристрої та системи автоматики: Метод. Вказівки до вивчення дисципліни для студтів спец. . 7.092501 “Автоматизація технологнічних процесів і виробництв заоч.форми навчання” / Уклад.: І.В.Ельперін, В.М.Кушков.
– К.: УДУХТ, 1998. – 20 с.
7. http://iac/honeywell/com http://www.rosemount/com http://www.prosoft/ru http://www.simens/ru/ad/as http://www.jumo.ru http://www.microl.ua