

vk.com/club152685050 | vk.com/id446425943
КБС-2І - під"єднання до блоку живлення і підсилювачів.
КБС--22 - під''єднання до дискретних входів-виходів контролера і блоку переключень.
КБС-23 -під"єднання вхідних і вихідних аналогових сигналів.
КБС-20 - для розгалуження електричних кіл.
1.3. Поняття алгоритму, алгоблоку та конфігурування
Поняття алгоритму, алгоблоку і операції конфігурування в визначальними і вельми важливими в розумінні структури контролера, його функціонування і можливості реалізації тих чи інших технічних задач.
Алгоритм
Контролер має велику бібліотеку-алгоритмів, достатню для реалізації складних задач автоматичного регулювання і логіко-програмного керування.
В загальному, бібліотечний алгоритм має свої входи, виходи та функціональне ядро. Входи алгоритму поділяються на сигнальні і настроювані. Сигнали, що надходять до входів першої групи, обробляються у відповідності з алгоритмом, а
сигнали другого типу керують його параметрами настройки. Так, на сигнальному вході інтегратора інтегрується, а на настроювальному вході — визначає постійну часу інтегрування сигналу.
На виході алгоритму формується сигнал, що є результатом обробки вхідної інформації.
Число входів і виходів алгоритму не фіксоване і визначається типом алгоритму. Однак, кількість входів, в алгоритмі не перевищує 99, а кількість виходів - 24.
Окремі алгоритми містять неявні входи і виходи, які мають спеціальне призначення і не доступні для конфігурування. До них слід віднести алгоритми вводу-виводу, приймання та передачі і оперативного управління. Як тільки такий алгоритм розмістити в будь-який блок, його неявні входи і виходи автоматично зв'язуються з апаратною частиною контролера. Неявні входи і виходи на Функціональних схемах показують пунктирною лінією.
Всі входи алгоритму мають наскрізну нумерацію від 01 до 99, а виходи - від
vk.com/club152685050 | vk.com/id446425943
01 до 24, а їх кількість визначається типом алгоритму.
Взагальному випадку бібліотечний алгоритм має три параметри;
бібліотечний номер, модифікатор і масштаб часу.
Бібліотечний номер - це двозначне число, що е основним параметром алгоритму. Модифікатор задає додаткові властивості алгоритму. Найчастіше модифікатор вказує на кількість однотипних операцій, які може виконати один алгоритм. Наприклад, в суматорі модифікатор задає кількість сумуючих входів.
Масштаб часу є тільки в алгоритмах, робота яких зв"язана з реальним часом, на-
приклад, регулювання, таймер, тощо.
Алгоблок
Бібліотечний алгоритм зберігається в бібліотеці і сам по собі ніяких функцій не виконує. Щоб він виконував свої функції, його необхідно розмістити в один із алгоблоків. Таким чином алгоблок фізично не існує, ніяких функцій не виконує,
доки в нього в процесі програмування не помістять будь-який алгоритм із бібліотеки.
При розміщенні алгоритмів в алгоблоки найчастіше діють два правила:
І. Будь-який алгоритм можна помістити в який-завгодно /за номером/
алгоблок; 2. Один і той же алгоритм можна розміщувати в різних алгоблоках.
Однак, із цих правил є виключення:
І. Алгоритм ОКО та ОКЛ, які формують інформацію на індикатори передньої панелі контролера, можна розміщувати тільки в перші чотири алгоблоки.
2. Для окремих алгоритмів є обмеження на кратність їх використання в межах одного контролера. Так, наприклад, алгоритм аналогового вводу групи А можна використовувати тільки один раз, оскільки він охоплює всі аналогові входи групи А.
Конфігурування
Процедура конфігурування задає для кожного входу алгоблоку джерело сигналу (йде мова тільки про явні входи і виходи алгоритму, неявні входи і виходи мають фіксовану конфігурацію).
vk.com/club152685050 | vk.com/id446425943
Кожний вхід алгоблоку може знаходитись в двох станах: зв'язаному та вільному. Вхід є зв"язаним, коли він з"єднаний з виходом якого-небудь алгоблоку; в іншому випадку він є вільним. На вільних входах сигнали можуть встановлюватись оператором у процесі настройки. Сигнали на цих входах бувають у вигляді констант або коефіцієнтів. Відмінність між константами і коефіцієнтами у можливості їх зміни, константи змінюються і встановлюються тільки в режимі програмування, а коефіцієнти, крім того, ще і під час роботи.
Сигнали на всякому зв"язаному вході, при необхідності, можна інвертувати
/для неперервних сигналів це означає зміну знаку, а для дискретних - зміну логічного стану/.
Процедура конфігурування зводиться до таких операцій;
І. Визначається для кожного входу алгоблоку буде він зв"язаним чи вільним;
2.Для зв"язаного входу задається номер алгоблоку і номер його виходу, з
яким він з"єднуеться, для вільних входів задаються тип сигналів , константа чи коефіцієнт; чисельне значення його задається процедурою настройки.
3.Для зв"язаних входів вказується, при необхідності,операція інвертування.
Таким чином можливості конфігурування підпорядковуються таким трьом правилам:
І. Всякий вхід будь-якого алгоблоку можна зв"язати з яким завгодно виходом алгоблоку або залишити вільним.
2. На всякому вільному вході будь-якого алгоблоку можна вручну задати сигнал у вигляді константи або коефіцієнта.
3. На будь-якому зв"язаному вході всякого адгоблоку сигнал можна інвертувати.
З цього правила є виключення: на окремих входах задаються тільки константи.
Для ілюстрування сказаного на рис.1.1 подано декілька варіантів конфігурування.
На рис.І.Іа показаний зв"язок алгоритму завдання ЗДН і алгоритму

vk.com/club152685050 | vk.com/id446425943
регулювання РАН. Для утворення зв'язку на вхід 01 алгоритму РАН подається сигнал з виходу 01 алгоритму ЗДН.
На рис.І.Іб показаний варіант конфігурування, при двох вхідних сигналах і одиному коефіцієнті /в даному випадку роль коефіцієнта виконує логічна змінна/ .
Для з'єднання з дискретними входами контролера використовується алгоритм ВДА вводу дискретних сигналів групи А. Входи 01 та 02 алгоритму багатовходо-
вого /МНИ/ з"єднуються з виходами 01 та 04 алгоритму ВДА, а вхід 03 алгоритму МНИ залишається вільнім і на ньому задається сигнал у вигляді коефіцієнта.
На рис.І.1 в показано, як розв'язана задача вводу інвертного сигналу від таймера на дискретний вихід контролера 03 /група А/. В один із алгоблоків
розміщений алгоритм дискретного виводу ДВА : його вхід 03 з'єднується з виходом 01 таймера ТМР. Сигнал на вході 03 алгоритму ДВА інвертується.
Рис.1.1
1.4. Правила оформлення функціональних алгоритмічних схем
Синтез систем керування технологічними об'єктами на базі Р-ІЗО вимагав оформлення функціональної схеми, елементами якої є бібліотечні алгоритми контролера. На цій схемі крім умовних зображень алгоритмів, наноситься система зв'язків між входами і виходами /конфігурація/, а також наявність /при
vk.com/club152685050 | vk.com/id446425943
необхідності інверсії сигналів на входах алгоритмів. Також бажано показати
чисельні значення параметрів настройки з відміткою його типу і константа чи
коефіцієнт.
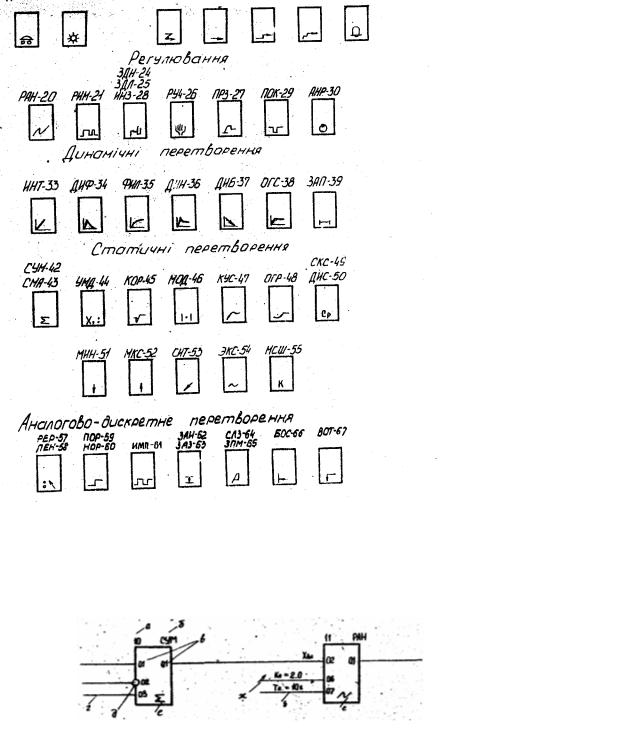
Для покращення розуміння функціональних алгоритмічних схем, алгоритми, які входять в неї, доцільно зображати умовними позначеннями, показаними на рис.1.2.
На функціональних схемах в них вписується технологічна назва етапів і кроків, що буде показано нижче на рис.1.3.
Рис.1.2
Рис.1.3
А) номер алгоблоку
Б)шифр алгоритму
В)номер входу або виходу Г)сигнал без інверсії Д)інвертування сигналу Е)символьне позначення
алгоритму Ж) коефіцієнт З)константа
vk.com/club152685050 | vk.com/id446425943
1.5. Приклади синтезу типових контурів керування на Р-ІЗО
При синтезі Контурів регулювання і логічного керування необхідно ознайомитися з будовою, функціональними властивостями і програмними можливостями контролера. Гарантом успішного проектування систем керування в чітке усвідомлення можливостей типових алгоритмів з бібліотеки алгоритмів і їх можливої взаємодії між собою. Нижче показані приклади типових контурів регулювання і програмно-логічного керування.
Приклади синтезу контурів регулювання
Для розв"язку задач регулювання використовується регулююча модель контролера, яка дав можливість синтезу чотирьох незалежних контурів регулювання.
Основою для побудови регуляторів є алгоритми :
РАН - регулювання аналогове;
РИМ - регулювання імпульсне; <
ЗДН - завдання;
ЗДЛ - завдання локальне;
РУЧ - ручне управління;
ОКО - оперативний контроль контура регулювання;
ВАА, ВАБ - ввід аналоговий групи А та В;
АВА, АВБ - аналоговий вивід групи А та Б;
ИВА, ИВБ - імпульсний вивід групи А та Б;
Алгоритми РАН та РИМ власне формують закони ПІД-регулювання в аналоговій і імпульсній формі. Для побудови каскадних регуляторів використовують два такі алгоритми, один а яких виконує функцію веденого регулятора, а другий - провідного регулятора.
Для оперативного управління роботою алгоритмів РАН та РИМ використовується низка алгоритмів, що забезпечує такі функціональні можливості. До них слід віднести такі: ЗДН, ЗДЛ, РУЧ, ОКО.
vk.com/club152685050 | vk.com/id446425943
Алгоритми ЗДН та ЗДЛ формують задаючі впливи відповідно локальному і каскадному регулятору і передбачають декілька видів завдання. Алгоритм РУЧ забезпечує перехід з автоматичного режиму в режим ручного або дистанційного керування. Наведені вище алгоритми працюють в комплекті а алгоритмом ОКО,
який виконує функції оперативного контролю при допомозі цифрових індикаторів передньої панелі контролера, а також забезпечує трансляцію команд від кнопок передньої панелі до алгоритмів оперативного управління.
При допомозі алгоритмів АВА, АВВ, ВАА, ВАБ, ИВА та ИВБ організовується зв"язок регулятора із зовнішніми колами контролера датчиками і виконавчими механізмами.
Розглянемо можливі варіанти деяких регуляторів:
І. Аналоговий стандартний регулятор.
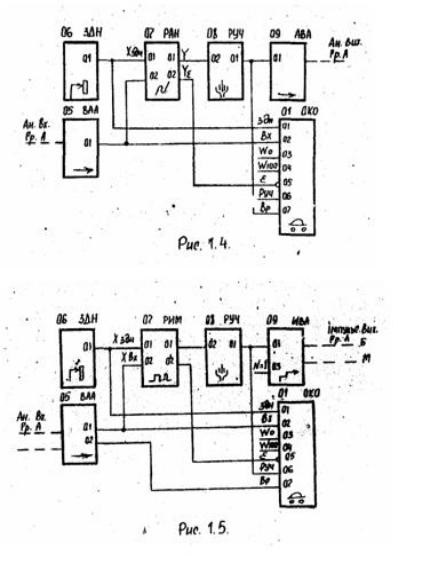
Приклад такого регулятора показаний на рис.І.4.
Функціонує стандартний регулятор у такий спосіб. Сигнал завдання,
сформований алгоритмом ЗДН, подається на вхід алгоритму РАН /вхід Хздн./, а
інший його вхід під'єднаний до датчика через алгоритм вводу ВАА. Вихідний сигнал алгоритму РАН через алгоритм РУЧ та АВА проходить до аналогового виходу контролера.
При допомозі алгоритму ОКО організований оперативний контроль і управління, функції, які він виконує, задаються шляхом конфігурації його входів.
Сигнал із входу "здн" алгоритму виводиться на верхній цифровий індикатор
"завдання" передньої панелі контролера незалежно від того, до виходу якого алгоблоку під'єднаний вхід "здн". Однак, оскільки сигнал завдання треба не тільки контролювати, але і змінювати вручну, тому він обов"язково комутується з першим входом алгоритму ЗДН.
На нижній цифровий індикатор вибіркового /селективного/ контролю в положенні "вх", "вих" подаються сигнали з відповідних входів алгоритмів ОКО.
Також е особливості в конфігуруванні входів "вр" і "руч" алгоритмів ОКО. На вхід "вр" можна подавати сигнали з виходів будь-яких алгоблоків, а вхід "руч"
обов"язково комутується з першим виходом алгоритму РУЧ, чим забезпечується
vk.com/club152685050 | vk.com/id446425943
можливість ручного дистанційного управління виконавчим механізмом.
Алгоритм ОКО має два настроювальні входи , на яких задаються константи,
що визначають верхній і нижній діапазон контрольованого сигналу для сигналів
на входах "вх", "вих". Так, наприклад, регулюється температура в межах 600...
...І200°С, і відповідає при використанні перетворювача БУТ відповідно 0 та 5 мА уніфікованого вхідного сигналу контролера. Якщо константи не задавати, тоді контроль автоматично ведеться у відсотках, тобто 0...100%.
2. Імпульсний стандартний регулятор
Побудова імпульсного регулятора в порівнянні з аналоговим має деякі особливості /рис.І.5/. Замість алгоритму РАН використовується алгоритм РИМ, а
замість алгоритмів аналогового вводу АВА або АВБ - алгоритми імпульсного вводу ИВА та ИВБ.
vk.com/club152685050 | vk.com/id446425943
Алгоритм РИМ формує ПІДзакон регулювання, який разом з інтегральними
властивостями виконавчих механізмам постійної швидкості дає ПІД-закон.
Є ще одна особливість імпульсного регулятора в можливості контролю його
виходів. В аналоговому регуляторі сигнал беруть з виходу алгоритму РУЧ
/рис.1.4/, який характеризує положення виконавчого механізму.
Розглянуті функціональні схеми стандартних регуляторів мають деякі
особливості загального характеру.
При організації оперативного управління необхідно дотримуватися таких
правил:
а/ для представлення інформації на передаю панель контролера треба
задіювати алгоритм ОКО;
б/ сигнал на вході "здн" алгоритму ОКО індикується на верхньому індикаторі; сигнали на входах "вх", "вр'', алгоритму ОКО селективне виводяться на нижній цифровий індикатор, сигнал на вході "вр", крім того, надходить до
шкального індикатора. |
|
3. Каскадні регулятори. |
. |
Каскадний регулятор складається з провідного і веденого регуляторів.
Аналоговий варіант такого регулятора показаний на рис.І.6а, а імпульсного — на рис.1.6б.
Особливість побудови таких регуляторів у використанні алгоритму ОКО.
Крім того, в ОКО задіяні входи 12 - 15. .
Контроль входів "здн", "вх.", на індикаторі передньої панелі можливий в каскадному режимі роботи, а сигнали групи "здн", "вх", - в локальному режимі.
Між алгоритмами ЗДН, РАН, ЗДЛ, РИМ, РУЧ можна розміщувати інші алгоритми :сумування, множення-ділення , обмеження, тощо. В каскадному регуляторі також встановлюються технічні одиниці, в яких контролюються сигнали. Так, у прикладі рис.І.6а задаються технічні одиниці для провідного регулятора 0 /О %/ та 1200 /ІОО %/, .а для веденого регулятора - 10 /О %/ та 50 /ІОО %/, при цьому в першому випадку йде мова про градуси Цельсія, а в другому - про тиск.
vk.com/club152685050 | vk.com/id446425943
4. Регулятор зворотної дії
Об'єкт регулювання може мати як пряму, так і обернену характеристику.
Розглянуті вище регулятори мали пряму характеристику. Для синтезу регулятора із зворотною характеристикою /рис. 1.7/сигнали на вході алгоритму РАН /РИМ/
інвертуються, а вхід ОКО не інвертується.
При каскадному регулюванні пряму чи обернену характеристику можуть мати як провідний, так і ведений регулятор.
5. Введення коректуючих сигналів
На вхід регулятора часто необхідно подавати сигнали статичної або динамічної корекції. На рис.І.8 показана вхідна частина регулятора зі статичною корекцією /цей сигнал вводиться з інверсією і масштабним коефіцієнтом Км = 0,І/. На цифровому індикаторі в положенні "вх" контролюється сигнал на першому аналоговому вході, а в положенні " z " - сигнал статичної корекції.
Оскільки на вхід " z " приходить аналоговий сигнал, тому на вході 09 алгоритму ОКО задається константа А= 8.
6. Регулятор співвідношення
Регулятор співвідношення, в якому сигнал завдання використовується як зміщення, показаний на рис.І.8.
Зміщення може бути Одержано без алгоритму ЗДН шляхом фіксування константи або коефіцієнту
безпосередньо на першому вході алгоритму РАН /РИМ/.
Якщо зміщення не потрібне, вхідна частина регулятора співвідношення виконується за схемою рис.І.9. Параметром настройки на третьому вході алгоритму РАН /РИМ/ встановлюється потрібне співвідношення між вхідними сигналами.
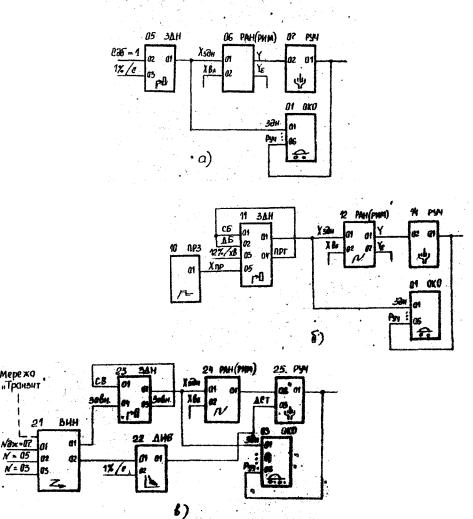
7. Програмний регулятор.
Для побудови програмного регулятора використовується спеціальний алгоритм програмного задатчик ПРЗ. В одному контурі можна реалізувати декілька програм, кожна з яких реалізована своїм алгоритмом ПРЗ. Всі вони під"єднані безпосередньо до входів алгоритму ЗДН, а перший вихід алгоритму
vk.com/club152685050 | vk.com/id446425943
ЗДН конфігурований а входом "здн" алгоритму ОКО /рис.1.1О/.
За схемою рис.І.ІОа після дії часової програми вихід ПРЗ заморожується.
Однак» за допомогою параметра на четвертому вході алгоритму ПРЗ можна задати необхідну кількість повторень програми.
При необхідності програму можна зациклити. Для цього використовують керуючі входи алгоритму ПРЗ /рис.І.ІОв/. На вході "пуск" задають константу у вигляді логічної 1, а вхід "обнулення" з'єднується з виходом "кінець програми''.
Програмою можна управляти також і за допомогою дискретних сигналів,
сформованих алгоблоками контролера або таких, що надходять не дискретні входи також переданих мережею "Транзит". На рис. 1.10г показане управління програмою через зовнішні по відношенню до контролера кнопки. Можливе суміщення цієї схеми з попередніми.
При програмному регулюванні часто необхідно формувати дискретні сигнали які фіксують моменти переходу програми до певної ділянки. Для цього корисно використати алгоритм порівняння чисел СЧИІ який з"еднуетьея аа схемою рис.І.ІОд. В цій схемі алгоритм СЧИ настроєний таким чином,що при досягненні програмою другої, п"ятої та сьомої ділянка формується дискретні сигнали відповідно на виходах ОІ, 02, 03 контролера.
8. Балансування задатчика.
Контур регулювання може працювати без балансування ручного задатчика зі статичним і динамічним балансуванням. Ручний задатчик балансується при всяких відключеннях контура /наприклад, переходи в режим ручного або дистанційного керування, при переключеннях з використанням інших алгоритмів,
т ощо/, а також при використанні зовнішнього і програмного завдання.
Слід розуміти відмінності між видами балансування при відключенні задатчика від контура регулювання:
-при відсутності балансування сигнал на .виході задатчика залишається незмінним;
-при статичному балансуванні вихідний сигнал задатчика відслідковує вхідний сигнал контура регулювання;
vk.com/club152685050 | vk.com/id446425943
Рис.1.6– Каскадні регулятори

vk.com/club152685050 | vk.com/id446425943
Рисунок 1.10
vk.com/club152685050 | vk.com/id446425943
- при динамічному балансуванні відслідковується вхідний сигнал, однак,
після включення контура сигнал завдання плавно повертається до межі ручної настройки.
Вид балансування задається дискретними сигналами на вході алгоритму ЗДН.
На рис. 1.11а показана вхідна частина регулятора з динамічним балансування.
Шляхом конфігурування входів алгоритму ЗДН можна автоматично настроювати або відміняти балансування, або перекодовувати з одного виду на інший. На рис.1.11б показане схема регулятора, у якого в режимі ручного завдання балансування відсутнє, а при переході в режим програмного завдання встановлюється одночасно статичне і динамічне балансування. При такій реалізації програмного задатчика в програмному режимі сигнал Хздн відслід-
ковується Хпр /тобто маємо статичне балансування/, при переході в ручний режим останнє значення завдання запам'ятовується і його можна змінити з пульта, при поверненні в програмний режим за рахунок динамічного балансування Хадн плавно наближається знову до сигналу Хпр. і відслідковує його. .
На рис.1.11в показаний приклад включення задатчика в режимі зовнішнього завдання. В цьому випадку діє статичне балансування, при якому даний задатчик відслідковує зовнішнє завдання, що надходить з п''ятого інтерфейсного виходу сьомого контролера мережі ''Транзит". Завдяки балансуванню при переході в режим ручного завдання останнє значення сигналу Хзовн запам"ятовується і одночасно балансування відключається.
Балансуватись може не тільки сигнал завдання, але і інші сигнали, що блокуються. Для такого балансування передбачений спеціальний алгоритм динамічного балансування ДИБ.
vk.com/club152685050 | vk.com/id446425943
Рис.1.11–Приклад балансування задатчика На тому ж рисунку показане балансування сигналу дистанційного керування.
В дистанційному режимі вихід регулятора формується сигналом з третього інтерфейсного виходу. Якщо в алгоритмі РУЧ дистанційний режим блокується,
алгоритм ДИБ забезпечує відслідкування вихідного сигналу регулятора для безударного переходу знову в цей режим.
9. Блокування заборони і помилок.
В системі регулювання можуть виникнути ситуації, що вимагають заборони дії регулятора в ту чи іншу сторону. Для цієї мети в бібліотеці є два алгоритми заборона зміни ЗАИ та заборона знаху ЗАЗ.
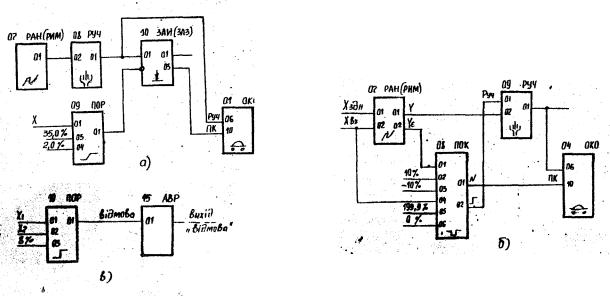
Один із варіантів організації заборони показаний на рис.1.12а. Пороговий елемент ПОР спрацьовує, коли вхідний сигнал К>35% з точністю до гістерезису
2 %• В зв"язку з тим, що команда заборони подається на вхід алгоритму ЗАИ
vk.com/club152685050 | vk.com/id446425943
/ЗАЗ/ з інверсією, заборона формується, коли сигнал Х < 35 %.
Дія аналогового регулятора в режимі заборони не тільки забороняється зміна сигналу на виході алгоритму, який формує заборону, але також блокується зміна сигнал в інтегруючій комірці алгоритму РАН.
На цьому рисунку алгоритм заборони включений після алгоритму РУЧ.Якщо виникнуть умови заборони, то вони поширюються як на сигнал від регулятора,
так і на сигнал ручного управління. Якщо на ручне управління не повинно поширюватись дія заборони, алгоритм ЗАИ /ЗАЗ/ включається перед алгоритмом РУЧ.
На передній панелі контролера розміщені чотири індикатори, які можуть сигналізувати помилку в контурі. В кожному контурі можна вибрати низку параметрів, вихід яких за певні межі інтерпритується як помилка контура. На рис.І.12б показаний варіант реалізації такої схеми за. допомогою алгоритму ПОК.
Вихід сигналів Хвх та Уе за встановлені межі сприймається алгоритмом ОКО і засвічується четвертий індикатор /алгоритм ОКО конролює четвертий контур/
передньої панелі. В даній схемі передбачений також перехід на ручний режим в разі виникнення помилки контура.
Якщо про помилку контура засвідчує стан дискретних сигналів, тоді замість алгоритму ПОК використовують алгоритм ДОК.
У разі недопустимої зміни сигналів можна сформувати не тільки помилку контура, але і сигнал "відмова" контролера. Приклад подібної схеми поданий на рис.І.І2в. За умови X1 – Х2> 8% формується вихід “відмова”.
Організація логічних програм
Для розв"язку задач логіко-програмного управління використовується логічна модель контролера, в якому можна реалізувати до чотирьох незалежних,
програм.
Кожна програма складається з етапів і кроків, які виконуються в.певній послідовності. Вона може бути лінійною або розгалуженою з умовними і безумовними переходами. Програма, крім того, може виконуватись одноразово,
vk.com/club152685050 | vk.com/id446425943
багаторазово або циклічно.
Для побудови логічних програм керування використовуються наступні
бібліотечні алгоритми:
ЗТП - етап крокової програми;
ОКЛ - оперативний контроль логічної програми;
ВАА, ВАБ, ВДА, ВДБ» ДВА, ДВВ - алгоритм вводу-виводу аналогових і
дискретних сигналів. '
Рисунок 1.12-Приклад формування заборони і аварійних відмов
vk.com/club152685050 | vk.com/id446425943
Рисунок 1.13
ЭТП - це "ядро" логічної програми. Він задав послідовність виконання програми і формує керуючі сигнали. В кожній програмі можна задіяти декілька алгоритмів ЗТП.
Алгоритм ОКИ виконує функції контролю за ходом виконання програми через індикатори передньої панелі, а також передав команди оперативного управління від кнопок передньої панелі.
Нижче наведені приклади побудови логічним програм керування.
1.Приклад логічної програми.
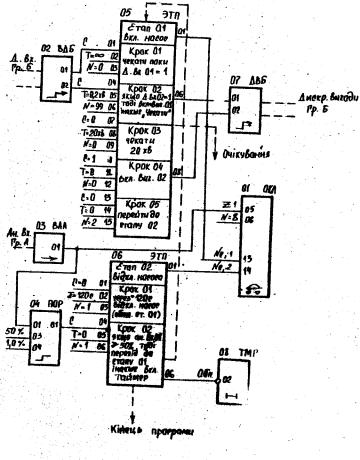
На рис.1.13показаний один із прикладів логічної програми, яка складається з двох етапів, перший з яких має п"ять, а другий - два кроки.
Перший етап формує програму включення насоса /назва етапів умовна/.
Перший крок етапу контролює сигнал на дискретному вході 01 контролера, який подається на вхід “С” кроку. При контрольному часі Т очікування виконання умови С = 1 : відбувається нескінчено довгий час, а в момент досягнення її
vk.com/club152685050 | vk.com/id446425943
програма переходить до наступного кроку.
На другому кроці контролюється стан дискретного входу контролера. Якщо на, протязі 0,2 хв на цьому вході буде логічна 1, тоді вмикається дискретний вихід контролера, в іншому випадку програна переходить у стан "очікування", про що свідчить константа /N= 99 /ознайомитись з описом алгоритму ЗТП/.
Третій крок формує витримку 20 хв. При цьому вхідні параметри кроку мають приймати значення; С = 0 або вільний Т ; 20 хв;
На четвертому кроці вмикається другий дискретний вихід контролера, що забезпечується установкою константи С =1.
На п'ятому кроці формується безумовний перехід до другого стану шляхом встановлення констант С = 0 та Т =0. Тоді параметр N= 2 вказує номер етапу, до якого здійснюється перехід.
Другий етап реалізує відключення насосу. На першому кроці через 120 с
обнулюється перший етап, що спричиняв до відключення дискретних виходів контролера. На другому кроці реалізується умовний перехід за такої умови: якщо сигнал на першому аналоговому вході контролера Х< 50 %,то здійснюється перехід (о першого етапу, в іншому випадку при Х < 50 ,запускається таймер і програма переходить в стан "кінець програми". .
Номера етапів задаються за допомогою алгоритму ОКЛ. Етап, під"єднаний до входу 1З цього алгоритму, мав номер 01, а входу 14 - номер 02 і т.д.
Алгоритм ОКЛ дозволяв вибірково контролювати до чотирьох різних сигналів на цифровому індикаторі.
При синтезі логічних програм керування требі дотримуватись таких правил:
а/ загальну задачу управління розбивають на окремі програми, які можуть виконуватись паралельно і незалежно. В кожній програмі виділяються свої етапи і кроки;
б/ програма, як мінімум, складається з одного алгоритму ЗТП та ОКП. Перші виходи кожного етапу повинні безпосередньо з"єднуватись з входами ОКЛ
/починаючи з ІЗ та далі/, які задають номер відповідного етапу;
в/номер алгоблоку в якому розміщений алгоритм ОКИ, відповідає номеру
vk.com/club152685050 | vk.com/id446425943
програми. Правила розміщення алгоритмів у алгоблоках для логічних програм такі ж, як і для контурів регулювання.
2. Циклічне виконання програми
Один із варіантів програми, яка виконує задане число разів, показаний на рис.І.І4.Тут основна частина програми реалізується за допомогою двох перших етапів, а третій етап разом з лічильником СЧТ контролює число виконань програмних циклів.
Перший крок третього етапу обнулює третій етап, тобто обнулює вихід другого кроку. При переході до другого кроку включається вихід 06 ЗТП і лічильник СЧТ збільшує свій вміст на одиницю. На третьому кроці запрограмований перехід до першого етапу.
Після того, як вміст лічильника стане рівним 10, на вході алгоритму ОКД формується сигнал "зупинка", і програма зупиняється.
Число виконання циклів контролюється на цифровому індикаторі передньої панелі.
3. Синхронне управління програмами.
Управління програмою здійснюється при допомозі команд, що надходять від кнопок передньої панелі контролера. Однак, . програму можна пускати, зупиняти і обнулювати також при допомозі дискретних команд зі спеціальних входів
алгоритму ОМІ. Це дав можливість синхронізувати роботу різних програм.
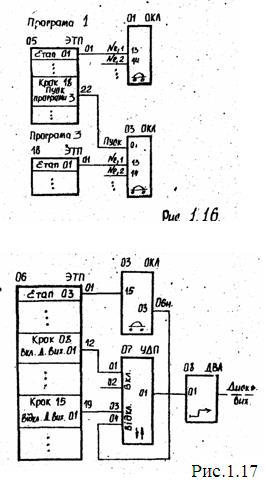
Перший варіант управління програмами показаний на рис.1.15. Тут оператор з пульта керування, управляючи першою програмою, одночасно синхронізує
роботу другої і третьої.
Другий варіант представлений на рис.І.16. Тут вісімнадцятий крок першого етапу першої програми запускає третю програму.
4. Управління виходами. '
Якщо стан дискретного виходу однозначно зв"язаний зі станом виходу будь-
якого кроку, тоді відхід кроку безпосередньо з'єднують із входом алгоритму дискретного виходу. Це показано на рис. 1.1.
Однак, часто необхідно, щоб один крок програми включає який-небудь
vk.com/club152685050 | vk.com/id446425943
вихід, а інший крок його відключав, причому ці команди поступають багаторазово. Для розв'язку такої задачі зручно користуватись алгоритмом керування двопозиційним навантаженням ЗДП або алгоритмом керування трипозиіцйним навантаженням УГП.
На рис. 1.17 подана схема управління двопозиційним навантаженням. Крок
08 включав навантаження, а крок 15 його відключає. Крім того, навантаження блокується при переході програми в стан "обнулення".
5.Формування сигналів помилки.
Влогічній моделі Р-130 є чотири індикатори на передній панелі, які можна використовувати для сигналізації помилки програми. Що вважати за помилку,
визначає споживач.
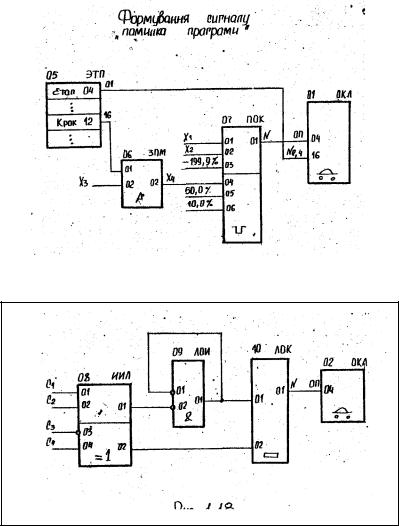
Помилка програми формується з використанням алгоритмів ПОК та ЛОК.
Приклад такої схеми зображено на. рис. 1.18. В ній помилка першої програми формується в разі, коли Х1 > X, або 10%> 50 %. Сигнал Х рівний Хд в момент виконання кроку 12 четвертого етапу. Фіксація сигналу X., проходить в алгоритмі запам"ятовування ЗИМ.
Помилка другої програми формується у випадку, коли дискретні сигнали Ст /
Ср або Сд ° Сд. Якщо виконується перша умова індикатор помилки пульсує з періодом 2Т/Т= 0,2 ... 2 с–час циклу контролера, якщо виконується друга умова,
індикатор горить постійно.
vk.com/club152685050 | vk.com/id446425943
Рис.1.14–Виконання програми задане число циклів
Рис.1.15–Синхронне керування програмою
vk.com/club152685050 | vk.com/id446425943
6. Індикація дискретних сигналів.
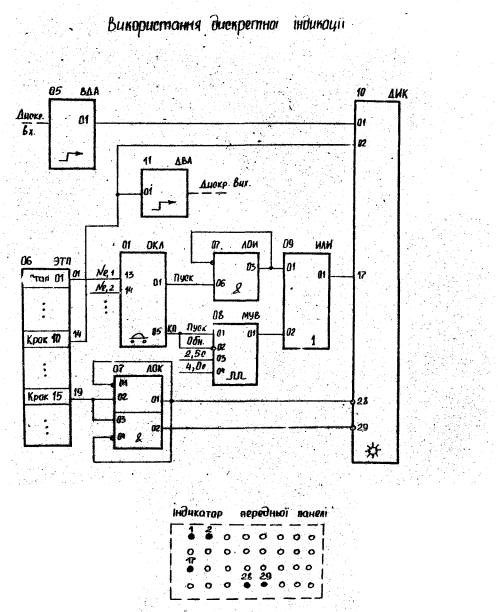
На передній панелі контролера є 32 лампові індикатори, які можна використовувати для контроль стану дискретних сигналів.
Для виходу дискретних сигналів на ці індикатори необхідно задіяти алгоритм дискретного контролю ДИК. Приклад побудови схеми контролю показаний на рис.І.19.
Першій індикатор засвічується, коли сигнал на першому дискретному вході контролера рівний логічній І. Другий індикатор сигналізує включення першого дискретного виходу контролера. Сімнадцятий індикатор засвічується у,двох випадках, -Дещо перша програма знаходиться в стані "пуск11, індикатор пульсує з періодом 2Т-, а якцо програма вичерпалась, тобто стан "кінець програми", індикатор пульсує а періодом 6,5 с /2,5 с горить і 4 с не горить/.
Пульсація з заданим періодом забезпечується мультивібратором М№. Керування ним здійснюється переднім фронтом сигналів "пуск" і
vk.com/club152685050 | vk.com/id446425943
"обнулювати". Коли програма доходить до кінця, мультивібратор запускається,
а коли програма обнулюється, тоді мультивібратор також скидується.
Двадцять восьмий і двадцять дев"ятий індикатор спрацьовують у такий спосіб. Коли ІБ-1 крок виключений, обидва індикатори світяться, а коли 15-й
крок включений, індикатори спалахують у протмфазі.
Рис.1.18
vk.com/club152685050 | vk.com/id446425943
Рис.1.19