

Министерство образования и науки Украины
Донбасский государственный технический университет
Методические указания
по курсу:
«Теория автоматического управления»
Алчевск 2008
Цель работы – изучение разделов теории «Дискретные системы автоматического управления» при последующем использовании его в курсах «Моделирование объектов и систем управления горной промышленности», «Автоматизация горно-технологических процессов и производств» и др., курсовом и дипломном проектировании.
Дискретные системы автоматического управления
Понятие о дискретных системах
Система автоматического управления называется дискретной, если выходная величина какого-либо из ее элементов имеет дискретный (прерывистый) характер. Элемент, преобразующий непрерывный сигнал в прерывистый, называется дискретным элементом (дэ) (квантователем, дискретизатором).
В общем случае дискретную САУ можно представить в виде соединения ДЭ и непрерывной части (НЧ).
Функциональная система дискретной САУ приведена на рис. 1.
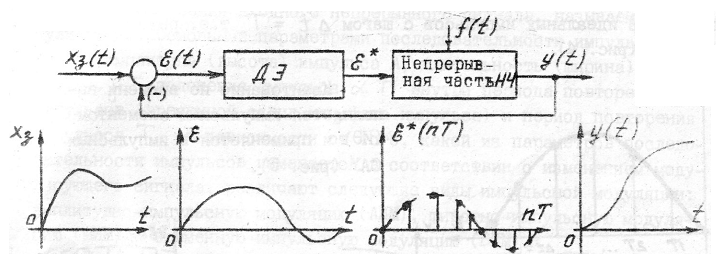
Рисунок 1
ДЭ работает по принципу модулятора, в котором изменение какого-либо параметра переносчика сообщений происходит по закону передаваемого сигнала (рис.2).
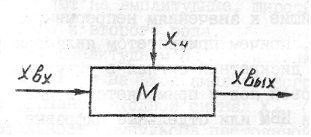
Рисунок 2
На рис.2 приняты следующие обозначения:
xвх – сигнал, подлежащий модуляции;
xн – «опорный» (несущий) сигнал;
xвых – выходной сигнал, т.е. результат модуляци.
![]()
Если несущий сигнал xн носит дискретный характер, тогда модуляция дискретная.
Различают дискретность (квантование) по уровню и по времени.
Квантование по уровню заключается в фиксации вполне определенных дискретных значений непрерывного сигнала (рис.3 ∆x – интервал квантования по уровню).
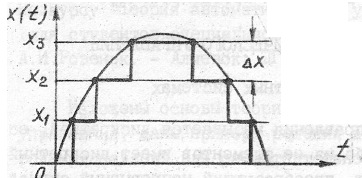
Рисунок 3
Квантование по уровню выполняется специальными элементами – квантователями, например, квантователями являются двух- и трехпозиционные реле. Примером САУ, в которых осуществляется квантование по уровню, являются релейные системы.
Квантование по времени заключается в фиксации мгновенных значений непрерывного сигнала в равноотстоящие друг от друга дискретные моменты времени. При этом сигнал представляет собой последовательность идеальных импульсов с шагом ∆t =T, т.е. решетчатую функции (рис.4).
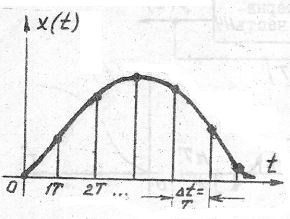
Рисунок 4
Квантование по времени выполняется импульсным элементом (ИЭ) и применяется в импульсных САУ (рис.5).
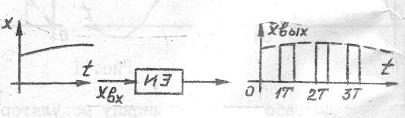
Рисунок 5
При совместном квантовании по уровню и времени фиксируются дискретные по уровню значения, ближайшие к значениям непрерывного сигнала в дискретные моменты времени, причем приоритетом является квантование по времени. Обычно такой дискретный сигнал в результате кодирования превращается в цифровой код и применяется в цифровых САУ, в которых используется или ЦВМ или отдельные цифровые устройства. Теоретической базой для аналитических исследований цифровых САУ является теория дискретных систем (точнее импульсных). Для исследования цифровых САУ пользуются методами расчета, основанными на рассмотрении линеаризованных импульсных систем.
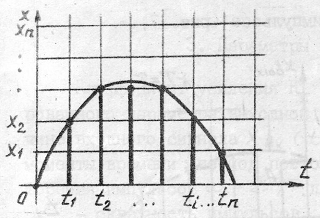
Рисунок 6
Определение импульсной системы
Импульсная система содержит импульсный элемент (ИЭ), осуществляющий квантование непрерывного входного сигнала x(t) в последовательность модулированных импульсов. Поэтому импульсный элемент можно рассматривать как модулятор импульсов, осуществляющий модуляцию какого-либо параметра периодически повторяющихся импульсов по закону изменения входного непрерывного сигнала, называемого модулирующим. Основными параметрами последовательности импульсов являются амплитуда (высота) импульса А, длительность (ширина) импульса τ =γТ, положение импульса αТ внутри периода повторения Т импульсов (временной сдвиг или фаза импульса) и период повторения импульсов Т. В зависимости от того, какой из параметров последовательности импульсов изменяется в соответствии с изменением моделирующего сигнала, различают следующие виды импульсной модуляции: амплитудно-импульсную модуляцию (АИМ), широтно-импульсную модуляцию (ШИМ) и временную импульсную модуляцию (ВИМ).
Если модулируемый параметр остается постоянным в течении времени существования импульса, то имеют импульсную модуляции первого рода –ИМ1, если же он изменяется в соответствии с текущим значением модулирующей функции, то имеют импульсную модуляцию второго рода – ИМ2. ИЭ в зависимости от вида и рода импульсной модуляции подразделяют на амплитудные, широтные и временные ИЭ соответственно первого и второго рода.
В амплитудном ИЭ происходит амплитудно-импульсная модуляция (АИМ). Если на вход амплитудного ИЭ, осуществляющего АИМ1, подать непрерывный входной сигнал xвх (t), то на выходе получат последовательность импульсов постоянной длительности с периодом повторения Т, амплитуда которых пропорциональна значениям модулирующего (входного) сигнала xвх (t) в равноотстоящие дискретные моменты времени, т.е. моменты возникновения импульсов (рис.7).
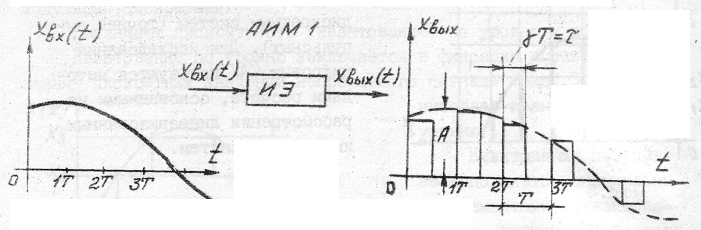
Рисунок 7
Частным случаем АИМ-1 являются:
а) ИЭ, выходные импульсы которого имеют длительность τ =γТ, значительно меньшую, чем период повторения, т.е. τ ‹‹ Т;
б) ИЭ, длительность импульсов τ =γТ которого равна периоду повторения Т. Такой ИЭ называется фиксирующим (экстраполятором нулевого порядка).
Широтно-импульсный элемент (ШИМ) формирует последовательность импульсов с периодом повторения Т одинаковой амплитуды, но ширина импульсов τ =γТ пропорциональна значениям моделирующего (входного) сигнала xвх (t) в моменты возникновения импульсов.
Если на вход временого ИЭ первого рода (ВИМ) подать непрерывный сигнал xвх (t), то на выходе будем иметь последовательность импульсов одинаковой амплитуды и ширины, сдвиг которых по времени (по фазе) αТ относительно дискретных моментов времени квантования 0, 1Т, 2Т, … nТ соответствует значениям входного сигнала в эти дискретные моменты времени.
В зависимости от вида и рода (первого или второго) импульсных элементов (ИЭ) системы автоматического управления подразделяют на три типа: амплитудно-импульсные системы (АИС); широтно-импульсные системы (ШИС); временные импульсные системы (ВИС) (или частотно-импульсные системы ЧИМ).
Дальше рассматриваются наиболее распространенные дискретные системы – АИС первого рода.
Цифровые системы при определенных условиях сводятся к анализу АИС. Совместное квантование по уровню и времени в цифровых системах осуществляется при помощи аналого-цифрового преобразователя (АЦП). В АЦП происходит также кодирование дискретных значений сигнала – представление их в виде последовательности чисел и запись в каком-либо цифровом коде.