

Кинематика
Задача К-1
Кинематика точки (координатный способ задания движения)
По заданным уравнениям движения точки установить траекторию точки и определить скорость, касательное, нормальное и полное ускорения точки в моменты времени t0 = 0 и t1.Выполнить чертеж траектории и показать на нем скорость и ускорение точки при t0 = 0 и t = t1. Определить радиус кривизны траектории при t0 = 0 и t = t1 и установить характер движения точки (ускоренное, замедленное, мгновенно-равномерное и т. п.).
Данные для решения принять из табл. К-1: уравнение движения по оси X – по предпоследней цифре варианта задания, а момент времени t1 и уравнение движения по оси Y – по последней цифре варианта задания.
Таблица К-1
№ условия |
Уравнение движения в см |
t1, с |
№ условия |
Уравнение движения в см |
t1, с |
1 |
4 cos (t) |
1,50 |
6 |
1 – 4 sin (t) |
1,00 |
2 |
3 sin2 (t) – 2 |
0,25 |
7 |
3 – 2 cos (t) |
0,50 |
3 |
2 cos2 (t) – 4 |
0,75 |
8 |
3 – 6 cos2 (t) |
0,25 |
4 |
– 3 cos (2t) |
0,25 |
9 |
2 cos (2t) – 1 |
0,75 |
5 |
2 – 4 sin2 (t) |
0,75 |
10 |
sin (t) |
2,00 |
Задача К-2
Кинематика точки (естественный способ задания движения)
Точка М движется по замкнутой линии (рис. К-2, а), состоящей из плавно переходящих друг в друга прямо- и криволинейных участков. Последние выполнены из дуг окружностей радиусов r = 10 м и R = 30 м. Геометрические центры дуг окружностей обозначены на рисунках. Длины участков определяются линейными и угловыми размерами, принимаемыми непосредственно по чертежам траекторий, выполненным в масштабе: одна клетка соответствует 10 м.
Движение точки начинается в момент времени t0 = 0 из пункта М0 и происходит в соответствии с графиком изменения скорости (рис. К-2, б). Начальная дуговая координата точки S0 = ОМ = – 50 м. Положительное направление движения точки показано стрелкой на каждом из чертежей траекторий.
По заданному движению точки:
определить положение точки на траектории в выделенные моменты времени t1, t2 и т. д. и объяснить, какие изменения в движении точки происходят в эти моменты;
установить особенности движения точки (равномерное, ускоренное и т. п.) и направление ее движения по траектории на промежутках времени от t0 до t1, от t1 до t2 и т. д.;
вычислить путь, пройденный точкой к моменту времени t4 = 7 с, если к начальному моменту t0 = 0 он был равен нулю (s0 = 0).
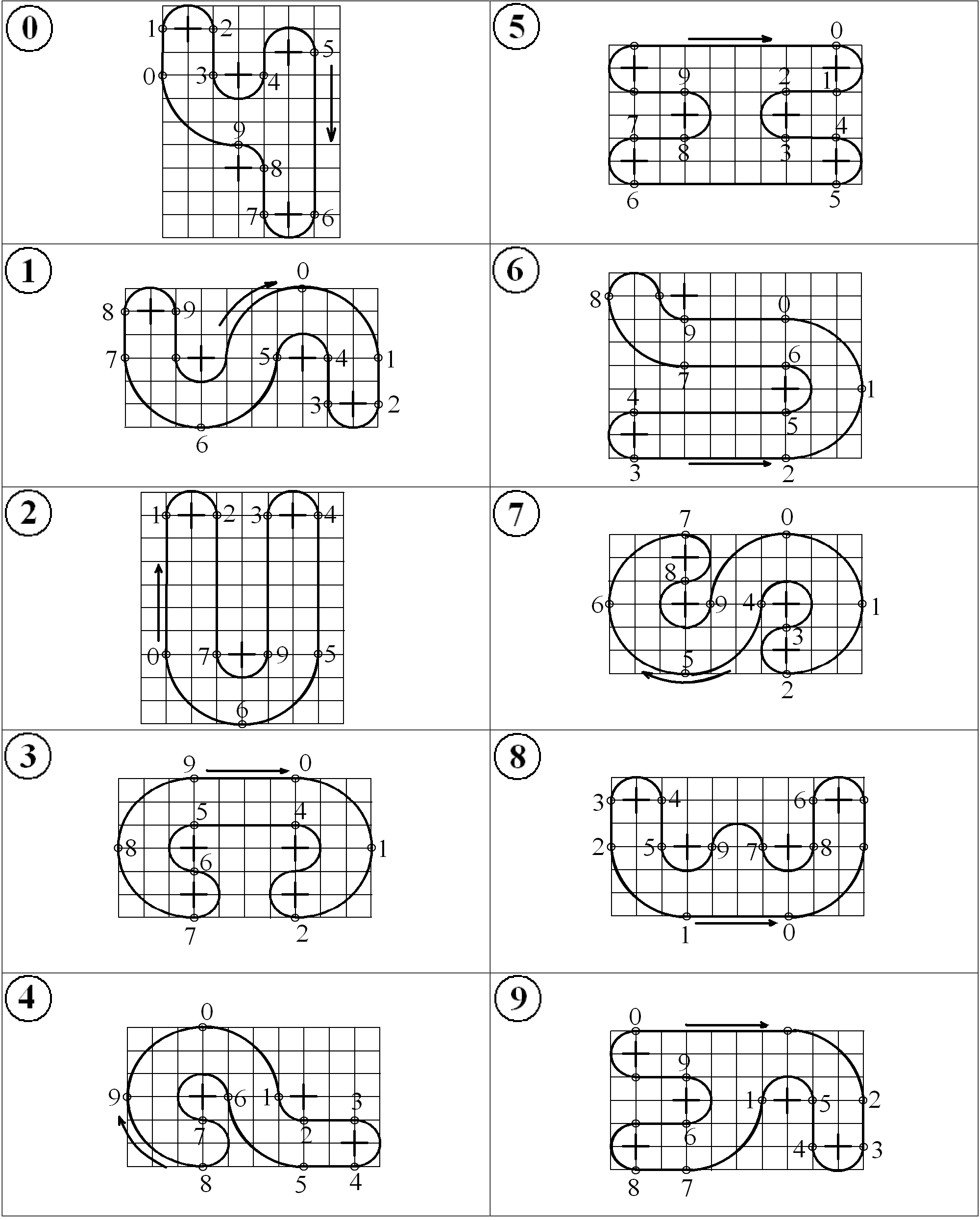
Рис. К-2, а. Чертежи траектории точки

Рис. К-2, б. График изменения скорости точки
Указания к выбору траектории, начала отсчета на ней дуговых координат и графика изменения скорости точки:
1. Номер схемы с чертежом траектории принимается по последней цифре варианта задания.
2. На чертежах траекторий выделены кружками точки сопряжения прямо- и криволинейных участков. Они пронумерованы и могут быть приняты в качестве начала отсчета О дуговых координат движущейся точки. Номер такой точки на чертеже траектории и номер кинематического графика изменения скорости должны совпадать и приниматься по предпоследней цифре варианта задания.
Например, в случае варианта 26 принимаются траектория 6 и кинематический график изменения скорости номер 2. На чертеже траектории 6 точка 2 принимается за начало отсчета О дуговых координат движущейся точки М. Ее начальное положение М0 находится в 50 м левее от точки О (рис. 1). В соответствии с графиком 2 изменения скорости: движение точки происходит сначала в направлении к началу отсчета дуговых координат, т. е. вправо от М0.
Задача К-3
Механические передачи (кинематика и преобразование
простейших движений твердого тела)
Механизм, состоящий из зубчатой и ременной передач, дополнен устройством, преобразующим вращательное движение зубчатого колеса 3 в поступательное движение зубчатой рейки 4 (схемы 1, 3, 4, 5, 8), либо приспособлением для подъема и опускания груза 4 с помощью троса, намотанного на барабан 3 (схемы 0, 2, 6, 7, 9). Механизм может быть использован и для преобразования поступательного движения груза (рейки) во вращательное движение других звеньев.
По заданному движению одной точки (или звена) получить картину движения всего механизма в момент времени t1 = 1 с (т. е. на кинематической схеме показать истинные направления движения всех звеньев механизма и его характерных точек: например, уточнить, поднимается или опускается груз 4, в какую сторону движется зубчатая рейка 4 и т. п.). Вычислить величины скоростей и ускорений (линейных, угловых) этих точек и всех звеньев в указанный момент времени.
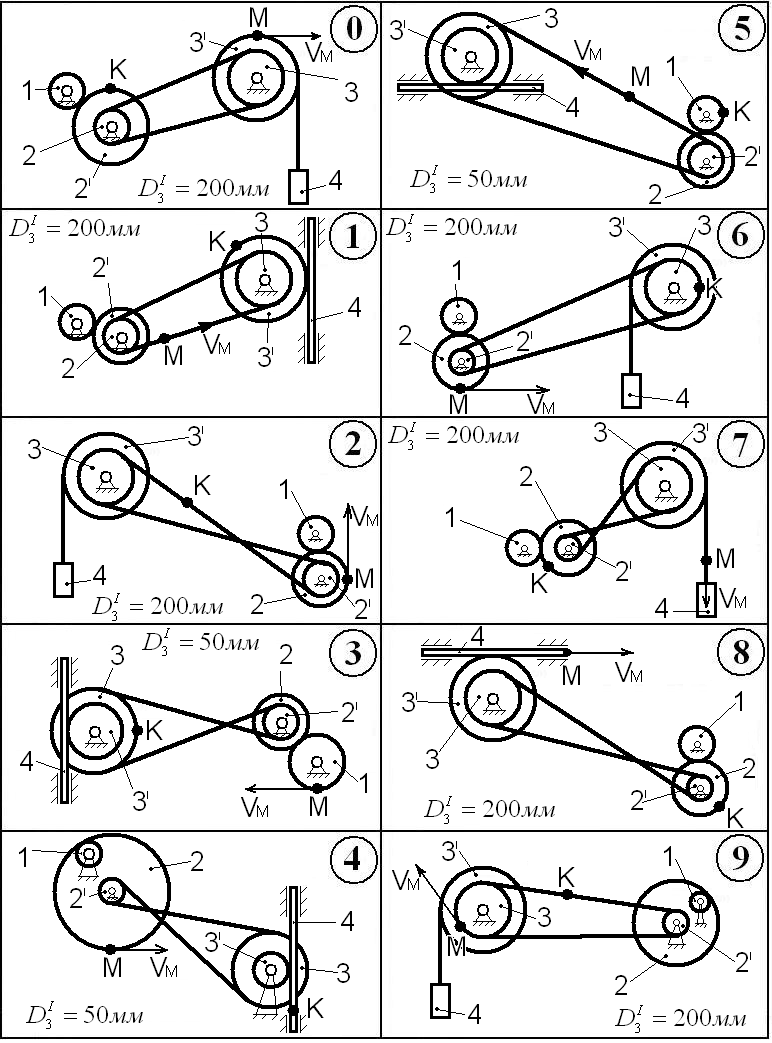
Рис. К-3
За положительное направление движения механизма принять то, при котором точка М движется так, как показано на рисунках кинематических схем (рис. К-3), т. е. на схемах 0 – 9 показано направление движения точки М, соответствующее случаю VМ > 0).
Таблица К-3
Предпоследняя цифра варианта |
|
|
|
|
|
|
0 |
27 |
120 |
80 |
180 |
|
1,0 |
1 |
21 |
165 |
100 |
140 |
|
3,0 |
2 |
17 |
102 |
80 |
160 |
|
0,5 |
3 |
19 |
124 |
90 |
180 |
|
2,0 |
4 |
17 |
186 |
125 |
160 |
|
3,0 |
5 |
31 |
124 |
100 |
125 |
|
3,0 |
6 |
18 |
60 |
100 |
180 |
|
2,5 |
7 |
21 |
85 |
80 |
140 |
|
0,5 |
8 |
24 |
119 |
100 |
160 |
|
1,0 |
9 |
19 |
118 |
125 |
180 |
|
1,5 |
Примечание. В таблице приняты обозначения:
 – числа зубьев
зубчатых колес;
– числа зубьев
зубчатых колес; – угловая скорость,
угловое ускорение звена
– угловая скорость,
угловое ускорение звена
 ,
вычисляемые в рад/с и рад/с2
соответственно;
,
вычисляемые в рад/с и рад/с2
соответственно; – линейная
скорость, касательное ускорение
некоторой точки К
механизма, отмеченной на рисунках
кинематических схем;
– линейная
скорость, касательное ускорение
некоторой точки К
механизма, отмеченной на рисунках
кинематических схем; – аналогичные
параметры движения груза (или зубчатой
рейки) 4. Единицы измерения этих величин
– в системе СИ, т. е. м/с, м/с2
соответственно;
– аналогичные
параметры движения груза (или зубчатой
рейки) 4. Единицы измерения этих величин
– в системе СИ, т. е. м/с, м/с2
соответственно; – диаметры шкивов
ременной передачи.
– диаметры шкивов
ременной передачи.
Задача К-4
Механические передачи (кинематический расчет привода)
На рис. К-4 показаны варианты кинематических схем привода барабана IV лебедки от двигателя М через двухступенчатый редуктор II. Для большей общности эти схемы дополнены ременной I (или цепной V) передачей, а также муфтой III.
Трос набегает на барабан со скоростью V.

Рис. К-4
Приняв номер схемы привода по последней цифре варианта задания, а числовые данные из табл. К-4 – по предпоследней, произвести кинематический расчет привода лебедки:
1. Определить передаточные отношения всех ступеней и привода в целом.
2. Подобрать диаметр
барабана D
и частоту вращения вала двигателя
![]() чтобы т. о., обеспечить требуемую скорость
набегания троса на барабан с наименьшим
отклонением ее
чтобы т. о., обеспечить требуемую скорость
набегания троса на барабан с наименьшим
отклонением ее
![]() от заданного значения. Диаметр барабана
принять из ряда: D
= 80, 100, 120, 150, 180, 200, 250, 300, 350, 400, 500, 600, 800,
1000 мм, а частоту вращения – из ряда
= 2850, 1450, 950, 720, 580 об/мин.
от заданного значения. Диаметр барабана
принять из ряда: D
= 80, 100, 120, 150, 180, 200, 250, 300, 350, 400, 500, 600, 800,
1000 мм, а частоту вращения – из ряда
= 2850, 1450, 950, 720, 580 об/мин.
Определить величины и направления угловых скоростей всех валов.
Показать на рисунке направления векторов угловых скоростей валов, считая, что трос набегает на барабан.
Примечание.
![]() ,
,
где ![]() – заданное (требуемое) значение скорости
троса;
– заданное (требуемое) значение скорости
троса;
![]() – то значение
скорости троса, которое обеспечивается
выбранными
и D
барабана.
– то значение
скорости троса, которое обеспечивается
выбранными
и D
барабана.
Таблица К-4
Величина, обозначение |
Предпоследняя цифра варианта задания |
||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
Диаметры ведущего и ведомого шкивов ременной передачи, мм |
|
140 |
90 |
125 |
140 |
160 |
160 |
125 |
140 |
90 |
125 |
|
315 |
255 |
180 |
255 |
315 |
280 |
255 |
180 |
180 |
280 |
|
Числа зубьев зубчатых колес и звёздочек |
|
26 |
23 |
19 |
29 |
20 |
24 |
24 |
21 |
26 |
21 |
|
45 |
43 |
51 |
93 |
49 |
50 |
78 |
74 |
66 |
65 |
|
|
19 |
26 |
20 |
18 |
21 |
17 |
22 |
20 |
24 |
25 |
|
|
49 |
54 |
62 |
40 |
61 |
70 |
53 |
75 |
85 |
68 |
|
|
37 |
30 |
34 |
38 |
30 |
32 |
24 |
60 |
35 |
29 |
|
|
83 |
85 |
49 |
69 |
59 |
56 |
49 |
77 |
70 |
65 |
|
Скорость набегания троса на барабан лебедки, м/с |
|
1,5 |
2,1 |
2,7 |
3,3 |
3,9 |
3,0 |
3,1 |
1,8 |
2,3 |
2,2 |
Задача К-5
Кинематический расчет полиспаста
На рис. К-5 показаны схемы полиспастов, применяемых в грузоподъемных машинах.
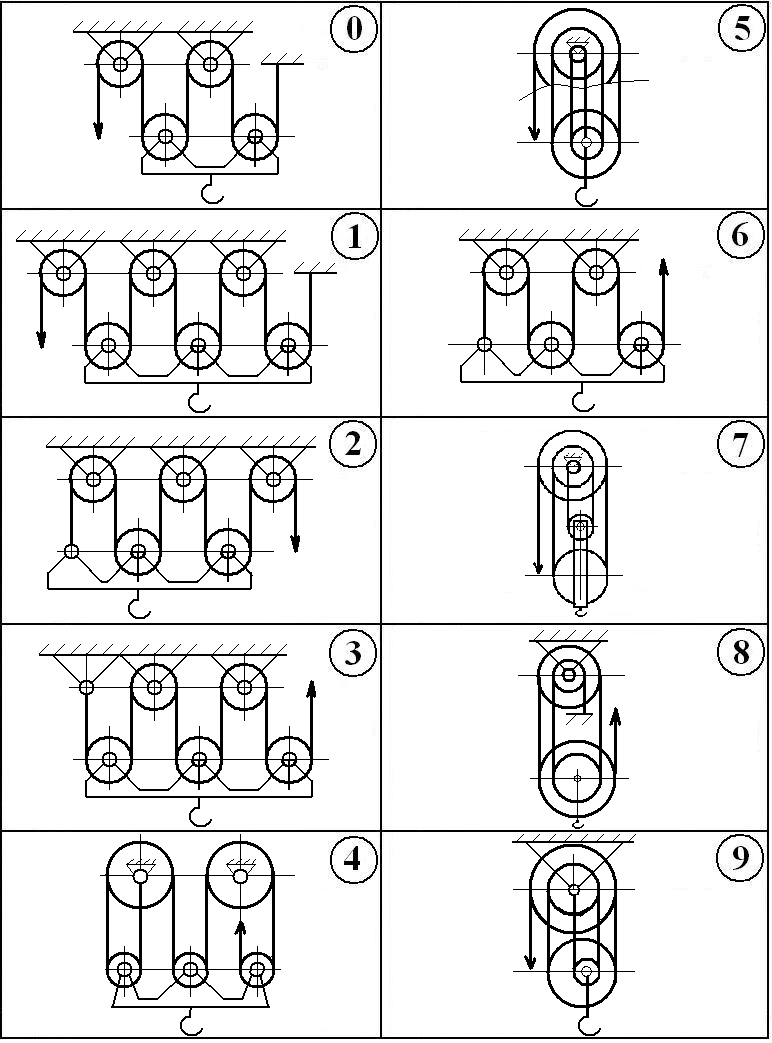
Рис. К-5
Произвести кинематический расчет полиспаста, а именно:
1. Объяснить назначение полиспастов и их применение в грузоподъемных машинах, а также принцип устройства полиспастов (на примере предложенной схемы).
2. Дать определение понятия «кратность полиспаста» и подсчитать ее для заданной схемы.
Определить величину и направление угловых скоростей всех блоков и показать их на рисунке.
В расчетах принять,
что скорость подвижной траверсы равна
скорости подъема груза
![]() .
Все ветви троса параллельны (вертикальны);
радиус самого маленького блока равен
5 см.
.
Все ветви троса параллельны (вертикальны);
радиус самого маленького блока равен
5 см.
Таблица К-5
Скорость груза |
Предпоследняя цифра варианта задания |
|||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
(м/с) |
0,15 |
0,20 |
0,10 |
0,25 |
0,20 |
0,35 |
0,40 |
0,30 |
0,35 |
0,40 |
Задача К-6
Кинематический расчет дифференциального (планетарного) механизма
В конструкциях некоторых приводов применяются так называемые планетарные и дифференциальные зубчатые механизмы. Их отличительной особенностью является то, что в механизме имеется колесо, которое вращается вокруг движущей оси.
Движение таких колес напоминает движение планет. Отсюда – их название: планетарные колеса или сателлиты.
Звено, несущее на себе ось сателлита, называется водилом. Ось вращения водила совпадает с геометрической осью центрального колеса.
В планетарном механизме есть неподвижное центральное колесо, которое в дифференциальном механизме может вращаться независимо от водила.
Механизмы могут быть дополнены вторым центральным колесом, а сателлиты выполнены в виде блоков из двух зубчатых колес.
Приняв номер схемы механизма по последней цифре варианта задания, произвести кинематический расчет механизма:
определить тип данного механизма (дифференциальный, планетарный);
определить угловые скорости всех звеньев механизма, предварительно выполнив рисунок схемы в соответствии с заданными размерами, приняв из таблицы только те угловые скорости, которые не противоречат кинематической схеме механизма (в частности, угловая скорость водила не может быть принята равной нулю ни при каких исходных данных таблицы).
Таблица К-6
Величины |
Предпоследняя цифра варианта задания |
|||||||||||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|||||||||||
|
20 |
15 |
25 |
17 |
22 |
18 |
14 |
12 |
16 |
11 |
||||||||||
|
5 |
3 |
4 |
5 |
4 |
3 |
10 |
6 |
6 |
3 |
||||||||||
|
7 |
5 |
6 |
8 |
10 |
5 |
6 |
8 |
4 |
5 |
||||||||||
|
– 5 |
3 |
- |
6 |
– 10 |
8 |
– 2 |
– |
6 |
– 4 |
||||||||||
|
10 |
– |
– 4 |
8 |
– |
– |
– 6 |
– 3 |
– 5 |
– |
||||||||||
|
– |
8 |
5 |
– |
7 |
– 4 |
– |
– 5 |
– |
– 10 |
||||||||||
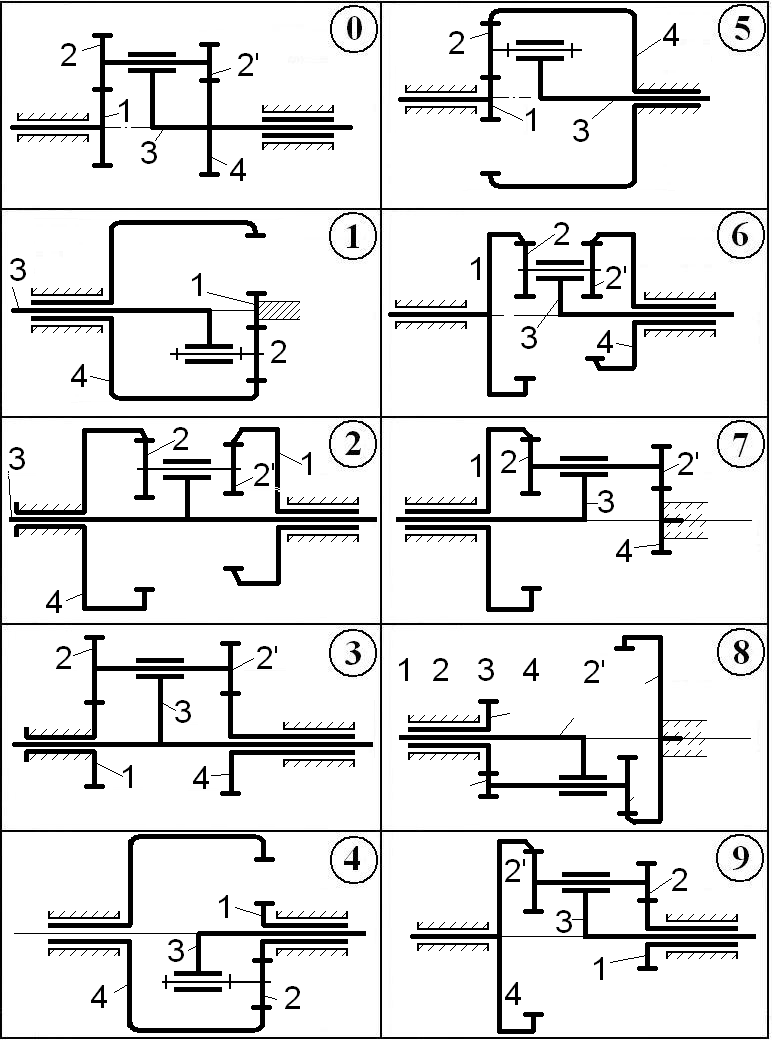
Рис. К-6
Задача К-7
Кинематика рычажного механизма
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна (схемы 0 – 7) или из стержней 1, 2, 3 и двух ползунов (схемы 8, 9).
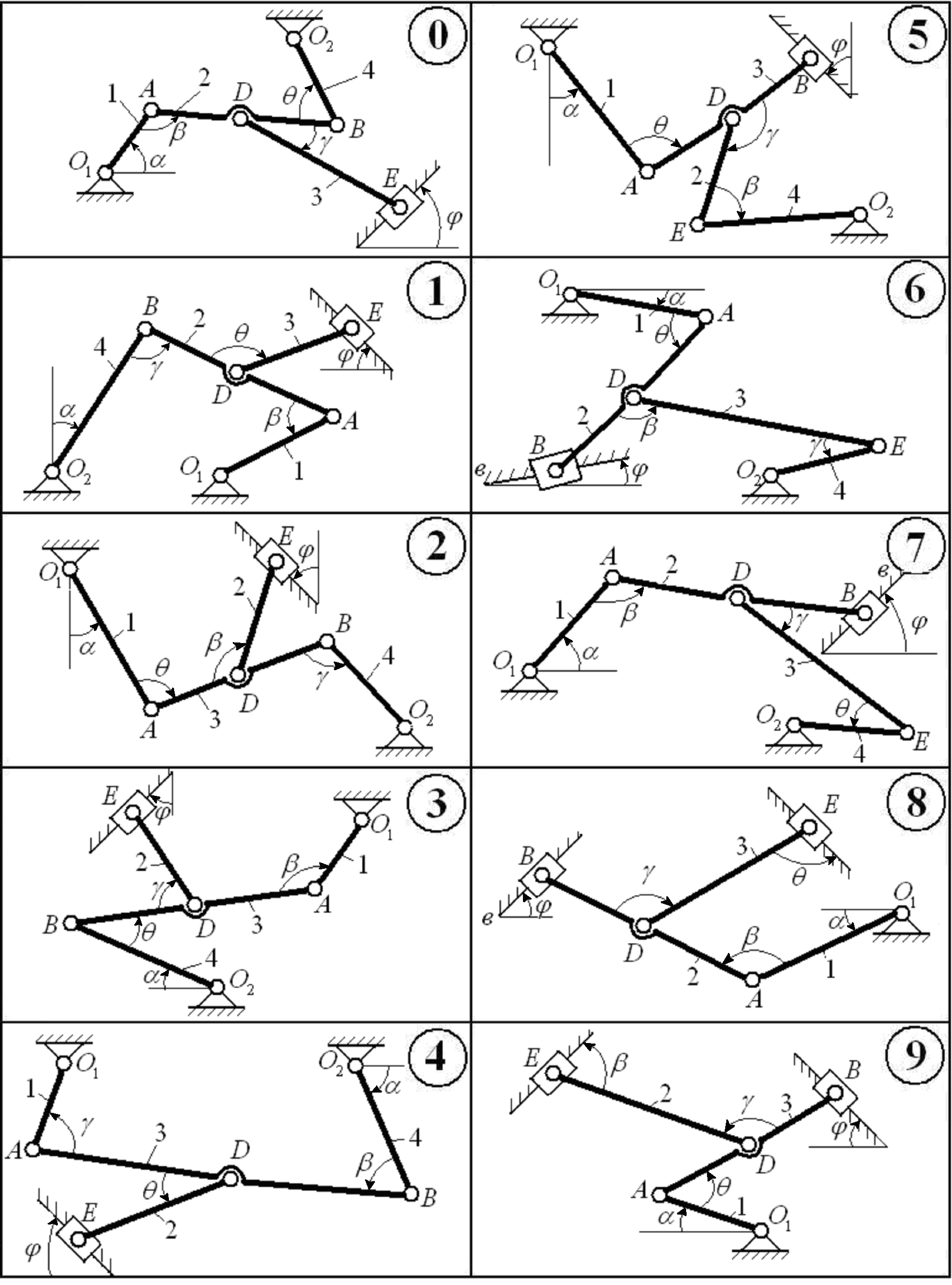
Рис. К-7
Звенья механизма соединены друг с другом и с неподвижными опорами О1, О2 шарнирами. Точка D находится в середине стержня АВ. Длины стержней равны соответственно l1 = 0,4 м, l2 = 1,2 м, l3 = 1,4 м, l4 = 0,6 м. Положение механизма определяется углами , , , , . Значения этих углов и других заданных величин указаны в табл. К-7, а (для схем 0 – 4) или в табл. К-7, б (для схем 5 – 9); при этом в табл. К-7, а – 1, 4 – величины постоянные.
Определить величины, указанные в таблицах в столбцах «Найти».
Таблица К-7, а