

2.2.2. Принцип работы системы гикв
ИКВ-1 – комплексная система, состоящая из ГИКВ и магнитного корректора МК. Работа системы ГИКВ основана на определении курса, углов крена и тангажа и составляющих абсолютной линейной скорости самолета гироинерциальным методом. Магнитный корректор МК обеспечивает начальную выставку гироплатформы системы ГИКВ по магнитному или географическому меридиану при наземной подготовке системы и формирование гиромагнитного курса в полете.
Принцип работы ГИКВ заключается в измерении углов маневра самолета относительно гиростабилизированной платформы, удерживаемой в плоскости горизонта по сигналам интегральной коррекции, сформированным путем интегрирования горизонтальных составляющих абсолютного ускорения самолета, измеренных акселерометрами, расположенными на гироплатформе, а в азимуте – по направлению, задаваемому свободным или корректируемым гироскопом.
Гироплатформа
представляет собой трехосный
гиростабилизатор, выполненный на трех
двухстепенных гироскопах. Оси
чувствительности гироскопов образуют
правый координатный трехгранник ![]() (рис. 2.2), ось
(рис. 2.2), ось ![]() которого ориентируется по линии отвеса,
оси
которого ориентируется по линии отвеса,
оси ![]() и
и![]() находятся в плоскости, перпендикулярной
линии отвеса, а точка
находятся в плоскости, перпендикулярной
линии отвеса, а точка ![]() считается совпадающей с центром тяжести
самолета. Для осуществления ориентации
оси
считается совпадающей с центром тяжести
самолета. Для осуществления ориентации
оси ![]() по направлению линии отвеса при
произвольном перемещении точки
по направлению линии отвеса при
произвольном перемещении точки ![]() трехгранник
трехгранник ![]() необходимо поворачивать в инерциальном
пространстве вокруг двух осей
необходимо поворачивать в инерциальном
пространстве вокруг двух осей ![]() и
и ![]() посредством приложения моментов к оси
чувствительности гироскопов 1Г и 2Г.
Третий гироскоп 3Г, осуществляющий
ориентацию оси
посредством приложения моментов к оси
чувствительности гироскопов 1Г и 2Г.
Третий гироскоп 3Г, осуществляющий
ориентацию оси ![]() гироплатформы в азимуте, может быть
либо свободным, либо корректируемым. В
последнем случае к оси чувствительности
гироскопа 3Г необходимо прикладывать
корректирующий момент, равный
гироплатформы в азимуте, может быть
либо свободным, либо корректируемым. В
последнем случае к оси чувствительности
гироскопа 3Г необходимо прикладывать
корректирующий момент, равный ![]() .
.
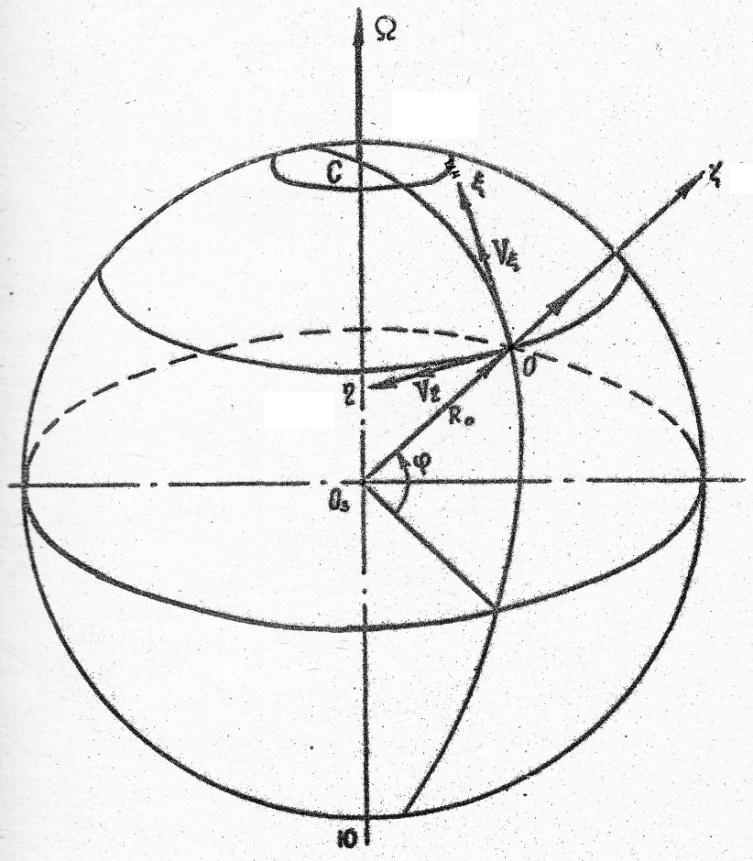
Рис 2.2. Координатный трехгранник ![]() на земной сфере
на земной сфере
Для обеспечения невыбиваемости при выполнении самолетом сложных пространственных маневров гиростабилизатор помещен в дополнительную (называемую в дальнейшем следящей) раму крена. Благодаря наличию следящей рамы крена исключается возможность совмещения осей трехосного гиростабилизатора и, как следствие, его выбиваемость (например, при положении самолета с углом тангажа близким к 90° и «падении» на крыло). С целью устранения кинематических погрешностей курса и углов крена и тангажа, выдаваемых гиростабилизатором, следящая рама крена отслеживается так, чтобы сохранялась перпендикулярность между рамой тангажа и внутренней рамой крена.
Структурная схема системы ИКВ-1 приведена на рис. 2.3.
На гироплатформе
установлены три датчика акселерометров
1А, 2А, 3А. Оси чувствительности датчиков
акселерометров ориентированы относительно
координатного трехгранника ![]() следующим образом:
следующим образом:
– ось чувствительности
датчика 1А направлена по оси ![]() ;
;
– ось чувствительности
датчика 2А направлена по оси ![]() ;
;
– ось чувствительности
датчика 3А направлена по оси ![]() .
.
Акселерометры,
состоящие из датчиков 1А, 2А, 3А и усилителей
1УА, 2УА, 3УА измеряют составляющие
абсолютного ускорения ![]() ,
,
![]() ,
,
![]() .
.
Составляющая
ускорения ![]() выдается потребителям в сумме с ускорением
силы тяжести для счисления вертикальной
составляющей скорости самолета.
выдается потребителям в сумме с ускорением
силы тяжести для счисления вертикальной
составляющей скорости самолета.

Рис. 2.3. Схема структурная ИКВ-1
Составляющие
ускорения ![]() и
и ![]() поступают на вход интеграторов для
получения составляющих
поступают на вход интеграторов для
получения составляющих ![]() и
и ![]() абсолютной линейной скорости самолета,
которые могут быть записаны в виде:
абсолютной линейной скорости самолета,
которые могут быть записаны в виде:
![]() , (2.1)
, (2.1)
![]() ,
,
где ![]() ,
,
![]() – начальные значения составляющих
абсолютной линейной скорости в точке
вылета.
– начальные значения составляющих
абсолютной линейной скорости в точке
вылета.
Для реализации
интегральной коррекции на датчики
моментов (ДМ) гироскопов 1Г и 2Г необходимо
подавать сигналы, пропорциональные
составляющим ![]() ,
,
![]() абсолютной угловой скорости соответственно,
которые получают преобразованием с
помощью масштабных множителей, имеющихся
на выходе интеграторов величин
абсолютной угловой скорости соответственно,
которые получают преобразованием с
помощью масштабных множителей, имеющихся
на выходе интеграторов величин ![]() и
и ![]() .
Известно, что зависимости между
составляющими
.
Известно, что зависимости между
составляющими ![]() и
и ![]() абсолютной линейной скорости и
составляющими
абсолютной линейной скорости и
составляющими ![]() и
и ![]() угловой скорости имеют вид:
угловой скорости имеют вид:
![]() , (2.2)
, (2.2)
![]() .
.
Подставив в зависимости (2.2) выражения (2.1), получим
![]() , (2.3)
, (2.3)
![]() ,
,
где ![]() ,
,
![]() – проекции горизонтальной составляющей
угловой скорости вращения Земли в точке
вылета.
– проекции горизонтальной составляющей
угловой скорости вращения Земли в точке
вылета.
Таким образом, в
системе измеряются и интегрируются
составляющие абсолютного ускорения
движения самолета по горизонтальным
осям ![]() и
и ![]() платформы.
платформы.
Моменты, пропорциональные интегралам от измеренных ускорений, накладываются на соответствующие гироскопы, что обеспечивает интегральную коррекцию платформы, при этом гиростабилизированная платформа приобретает свойство невозмущаемости при произвольном движении самолета.
Составляющие ![]() и
и ![]() абсолютной линейной скорости, измеренные
системой, выдаются потребителям.
абсолютной линейной скорости, измеренные
системой, выдаются потребителям.
Для
получения ортодромического курса,
обозначенного в системе ![]() ,
необходимо ось
,
необходимо ось ![]() гироплатформы удерживать по заданному
направлению относительно Земли, для
чего на гироскоп 3Г необходимо накладывать
корректирующий момент, обеспечивающий
прецессию гироплатформы с угловой
скоростью, пропорциональной
гироплатформы удерживать по заданному
направлению относительно Земли, для
чего на гироскоп 3Г необходимо накладывать
корректирующий момент, обеспечивающий
прецессию гироплатформы с угловой
скоростью, пропорциональной
![]() , (2.4)
, (2.4)
где ![]() – вертикальная составляющая угловой
скорости вращения Земли в точке вылета,
– вертикальная составляющая угловой
скорости вращения Земли в точке вылета,
![]() – дрейф гироплатформы по оси
– дрейф гироплатформы по оси ![]() .
.
В случае отсутствия
коррекции третьего гироскопа система
ГИКВ выдает так называемый гироскопический
курс ![]() .
.
Вследствие инструментальных погрешностей гироскопов, акселерометров, интеграторов гироплатформа в режиме интегральной коррекции будет иметь колебания относительно плоскости горизонта, и приборные значения составляющих абсолютной скорости будут иметь следующие значения:
![]() , (2.5)
, (2.5)
![]() ,
,
где ![]() ,
,
![]() , (2.6)
, (2.6)
![]() ,
,
![]() – углы отклонения осей чувствительности
датчиков 1А, 2А от плоскости горизонта.
– углы отклонения осей чувствительности
датчиков 1А, 2А от плоскости горизонта.
Для обеспечения работы системы ГИКВ в полете необходимо во время предполетной подготовки на неподвижном основании гироплатформу с акселерометрами выставлять в плоскость горизонта и в азимуте.
Выставка гироплатформы
в плоскость горизонта производится по
сигналам с датчиков 1А и 2А акселерометров,
а интеграторы ускорений 1БИ и 2БИ
используются для запоминания дрейфа
![]() ,
,
![]() гироплатформы по осям
гироплатформы по осям ![]() и
и ![]() соответственно.
соответственно.
Начальная ориентация
гироплатформы в азимуте может
осуществляться от любых средств
(устройств), определяющих положение
продольной оси самолета в азимуте,
имеющих в качестве выходного элемента
дистанционной связи синусно-косинусный
трансформатор–приемник. При использовании
в качестве такого устройства магнитного
корректора может быть обеспечена
выставка гироплатформы по магнитному
или истинному меридиану либо по заданному
направлению. В последнем случае
одновременно с выставкой гироплатформы
в азимуте происходит автоматическая
компенсация постоянной составляющей
дрейфа гироплатформы ![]() ,
для чего в систему вводится вертикальная
составляющая угловой скорости вращения
Земли
,
для чего в систему вводится вертикальная
составляющая угловой скорости вращения
Земли ![]() ,
равная
,
равная ![]() и формируемая в пульте начальных данных
ПНД-1 установкой географической широты
местонахождения самолета. В системе
также предусмотрена возможность
автоматического ввода указанной
составляющей от устройств, определяющих
ее.
и формируемая в пульте начальных данных
ПНД-1 установкой географической широты
местонахождения самолета. В системе
также предусмотрена возможность
автоматического ввода указанной
составляющей от устройств, определяющих
ее.