

Механическая характеристика трехфазного асинхронного двигателя с фазным ротором
Схема подключения двигателя к сети показана на рис. 7.3, а. В отличие от электродвигателя с короткозамкнутым ротором, двигатель с фазным ротором имеет фазную обмотку на роторе, концы которой выведены на кольца, закрепленные на валу ротора. При замыкании колец накоротко двигатель работает как короткозамкнутый.
М еханическая
характеристика двигателя будет
соответствовать кривой 1 на рис.
7.3,
б.
Электродвигатель имеет определенные
значения Мп,
Мк,
Sк,
Мном,,
nном,
nк.
Наклон рабочей части характеристики
определяется величиной сопротивления
ротора Rрот.
еханическая
характеристика двигателя будет
соответствовать кривой 1 на рис.
7.3,
б.
Электродвигатель имеет определенные
значения Мп,
Мк,
Sк,
Мном,,
nном,
nк.
Наклон рабочей части характеристики
определяется величиной сопротивления
ротора Rрот.
Если между кольцами обмотки ротора включить дополнительное активное сопротивление R (как показано на рис. 7.2, а), то механическая характеристика станет более мягкой (рис. 7.2, б, кривая 2), при сохранении той же величины Мк Чем больше по величине сопротивление R, тем при большем значении sк двигатель будет иметь максимальный (критический) момент Мк. При этом изменится и величина пускового момента в сторону увеличения его.
Можно подобрать такое значение R, при котором пусковой момент станет равен критическому. Если в процессе работы сопротивление R не будет выведено, то двигатель будет работать при моменте сопротивления, равном номинальному моменту, с частотой вращения п1 и скольжением s1. При этом n1 будет меньше nном (соответственно s1>sном). Если для данного случая построить скоростную характеристику, то окажется, что при сопротивлении в цепи ротора Rрот+ R пусковой ток меньше, чем при работе двигателя только с сопротивлением Rрот (т. е. при работе двигателя с короткозамкнутым ротором). Таким образом, включая в цепь ротора асинхронного двигателя с фазным ротором различные по величине дополнительные сопротивления, можно увеличить пусковой момент, одновременно уменьшая величину пускового тока, а также получать различную частоту вращения при заданном моменте сопротивления.
Указанные особенности асинхронного двигателя с фазным ротором дают возможность применять его в установках, где требуется большой пусковой момент, небольшой пусковой ток и регулирование частоты вращения.
Асинхронный двигатель с фазным ротором имеет ограниченное применение потому, что у него коэффициент мощности меньше, чем у таких же двигателей с короткозамкнутым ротором, включение дополнительного сопротивления в цепь ротора вызывает неоправданные потери электрической энергии (на нагрев реостата), двигатель имеет искрящие части.
Механическая характеристика синхронного двигателя
Синхронный двигатель состоит из статора с обмоткой, которая включается в сеть трехфазного тока и выполняет роль якоря машины, и ротора с обмоткой, которая получает питание от постороннего источника постоянного тока и выполняет роль индуктора машины.
Вращающий момент двигателя определяется по формуле
М = Mmax Sin Θ,
где Мmах—максимальный момент синхронного двигателя; Θ — угол расхождения между полюсами магнитных полей статора и ротора.
В синхронных двигателях с увеличением нагрузки частота вращения не меняется, а увеличивается угол в, поэтому механическая характеристика будет абсолютно жесткой (рис. 7.4, а), а для определения величины моментов используют угловую характеристику синхронного двигателя (рис. 7.4, 6)—зависимость М = f (Θ).
Из угловой характеристики видно, что в левой части ее с увеличением угла Θ момент вращения М увеличивается, в правой части с увеличением угла Θ момент уменьшается. Таким образом, устойчивая работа двигателя возможна только на левой части характеристики.
О
в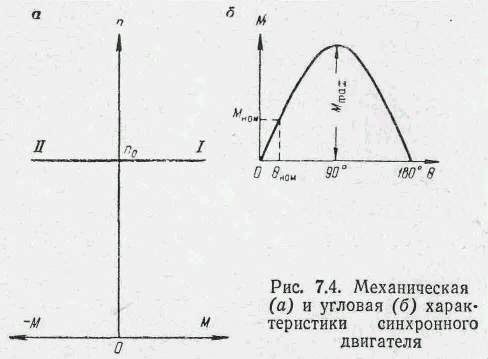 бычно
угол Θ
= 20÷30°
соответствует номинальному моменту
электродвигателя Мном.
Перегрузочная способность синхронного
двигателя λ
= 2÷2,5.
бычно
угол Θ
= 20÷30°
соответствует номинальному моменту
электродвигателя Мном.
Перегрузочная способность синхронного
двигателя λ
= 2÷2,5.
В зависимости от величины тока возбуждения двигатель может работать с cos φ меньше единицы (ток возбуждения меньше номинального) или равным единице (ток возбуждения равен номинальному). При перевозбуждении синхронный двигатель вырабатывает реактивную энергию и отдает ее в сеть переменного тока. Это свойство двигателя используется для улучшения cosqp сети.
Синхронные двигатели применяются для привода крупных, редко отключаемых машин (компрессоров, вентиляторов, насосов).
Регулирование частоты вращения двигателей переменного тока может быть осуществлено за счет изменения частоты тока, числа пар полюсов, включения в цепь ротора дополнительных активных сопротивлений, введения в цепь ротора дополнительной э.д.с. Для электродвигателей с короткозамкнутыми роторами возможности регулирования частоты вращения ограничены, гак как изменение частоты тока требует установки дополнительного оборудования, изменение числа пар полюсов требует выполнения специальной обмотки в статоре и пересоединения ее в процессе эксплуатации, а включение дополнительных сопротивлений в цепь ротора выполнить невозможно.
Практически нерегулируем и синхронный двигатель, а в электродвигателях с фазным ротором регулирование частоты вращения достигается за счет ввода в цепь ротора дополнительных активных сопротивлений. Данный способ неэкономичен, так как расходуется электроэнергия на нагрев реостата и уменьшается мощность на валу двигателя.
Лекция 6. Управления двигателями постоянного И перемННОГО ТОКА.