

Тормозные режимы для двигателей постоянного тока с независимым (параллельным) возбуждением.
Т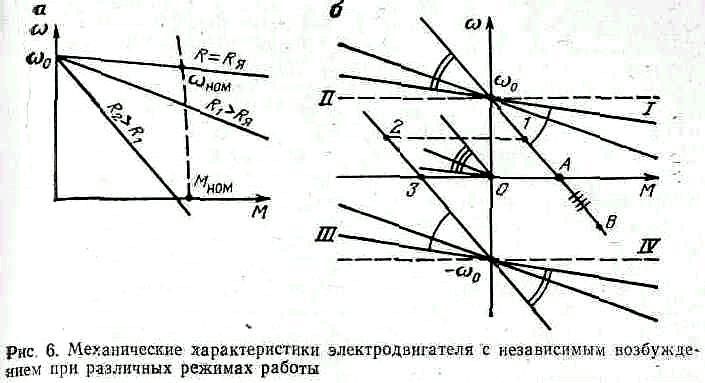 ормозные
режимы. Для двигателей с независимым
возбуждением возможны три режима
торможения: рекуперативное, противовключением
и динамическое.
ормозные
режимы. Для двигателей с независимым
возбуждением возможны три режима
торможения: рекуперативное, противовключением
и динамическое.
Рекуперативное торможение с отдачей энергии в сеть возможно в том случае, когда скорость двигателя, вращающегося в том же направлении, что и в двигательном режиме, станет больше скорости холостого хода, например при спуске груза. Схема включения Двигателя в этом режиме остается такой же, как и в двигательном, но поскольку угловая скорость якоря становится больше скорости холостого хода (ω> ωо), э.д.с. также будет выше напряжения сети и ток идет от двигателя в сеть. Кривые механических характеристик этого режима начинаются в точке, соответствующей идеальному холостому ходу (ωо), и являются продолжением таких же характеристик двигательного режима во II и IV (после реверса) квадрантах (на рис. 6, б линии с двумя засечками). Кинетическая энергия опускающегося груза преобразуется в электрическую, ко торая отдается в сеть. Знак момента меняется на отрицательный и уравнение (6) приобретает вид
![]()
Как видно из рассматриваемого рисунка, с увеличением сопротивления реостата в цепи якоря жесткость механических характеристик уменьшается и интенсивность торможения снижается. Рекуперативное торможение применяют в приводе рудничных подъемных машин и экскаваторов (спуск скипа, клети, ковша). Данный вид торможения экономичен, но имеет недостаток—его можно осуществить лишь при сравнительно высоких скоростях.
Динамическое торможение реализуется включением обмоток якоря на специальный реостат, а обмотки возбуждения в сеть. Двигатель работает в режиме генератора, преобразуя механическую энергию, запасенную в движущихся частях машин, в электрическую, которая затем в реостате превращается в тепловую. В режиме динамического торможения подводимое к двигателю напряжение равно нулю.
Механические характеристики динамического торможения представляют собой прямые линии, проходящие через начало координат (линии с тремя засечками).
Торможение противовключением. Если при работе в двигательном режиме вращающий момент двигателя снизить с помощью реостата так, чтобы он стал меньше статического момента сопротивления, то двигатель остановится (точка А, рис. 6, 6) и далее под действием груза начнет вращаться в противоположном направлении (линия АВ). В этом случае вращающий момент двигателя будет иметь направление, противоположное опусканию груза, т. е. станет тормозным. Смена направления вращения вызовет изменение знака э. д. с., которая теперь будет складываться с приложенным напряжением. Ток двигателя будет значительно больше, чем в двигательном режиме. В этом случае его значение можно определить из выражения
![]()
Соответственно большим будет и развиваемый двигателем тормозной момент, что может привести к слишком резкому торможению. Механическая характеристика режима противовключения, достигнутого вышеуказанным способом, — продолжение механической характеристики двигательного режима в квадранте IV (на рис. 6, 6 линия с четырьмя засечками).
Торможение двигателя противовключением возможно и другим способом: переменой полярности обмотки якоря двигателя на ходу; э.д.с. двигателя, как и в предыдущем случае, будет направлена согласно с напряжением сети, а момент—встречно направлению вращения якоря и при этом обеспечит торможение. При переключении полярности обмотки якоря знак момента изменится. Двигатель, работающий до переключения в точке 1, при переключении обмотки якоря перейдет в точку 2 в квадранте //. При остановке (точка 3) двигатель должен быть отключен, так как иначе он может разогнаться в обратном направлении и начать работать в двигательном режиме [линия 3 — (—ωо)] .
Лекция 4. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА С ПОСЛЕДОВАТЕЛЬНЫМ И СМЕШАННЫМ ВОЗБУЖДЕНИЕМ
Н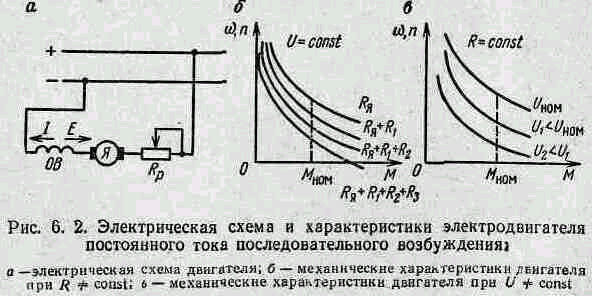 а
рис. 6.2, а показана схема подсоединения
к сети электродвигателя последовательного
возбуждения. Обмотка возбуждения 0В
и обмотка якоря Я соединяются
последовательно и через реостат Rp
подсоединяются к сети. Вследствие этого
поток возбуждения Ф зависит от тока
якоря, т. е. от нагрузки. Для этого вида
двигателей при ненасыщенной магнитной
системе магнитный поток можно считать
пропорциональным току якоря Iя,
а вращающий момент будет вычисляться
по формуле
а
рис. 6.2, а показана схема подсоединения
к сети электродвигателя последовательного
возбуждения. Обмотка возбуждения 0В
и обмотка якоря Я соединяются
последовательно и через реостат Rp
подсоединяются к сети. Вследствие этого
поток возбуждения Ф зависит от тока
якоря, т. е. от нагрузки. Для этого вида
двигателей при ненасыщенной магнитной
системе магнитный поток можно считать
пропорциональным току якоря Iя,
а вращающий момент будет вычисляться
по формуле
![]()
Отсюда ток якоря
![]()
Так как для двигателей постоянного тока напряжение сети уравновешивается э.д.с, якоря Е и падением напряжения в обмотках двигателя, то можно записать
![]()
Э. д. с. якоря Е пропорциональна частоте вращения n и магнитному потоку Ф, т, е.
![]()
Подставив значение Е и Iя в формулу (6.5) и решив уравнение относительно n, получим

Так как в уравнении (6.6) п и М переменные величины, то это уравнение является уравнением механической характеристики двигателя.
При малой нагрузке характеристика имеет большую крутизну, при больших нагрузках магнитная система насыщается и поток уже почти не зависит от нагрузки — характеристика превращается в почти прямолинейную, с малой крутизной (рис. 6.2, б).
Из уравнения механической характеристики следует, что;
а) при уменьшении вращающего момента М до нуля частота вращения возрастает до бесконечности — двигатель идет «в разнос» (может произойти механическое повреждение якоря). Таким образом, электродвигатель постоянного тока последовательного возбуждения нельзя включать в сеть без механической нагрузки на его валу;
б) при п = 0 величина вращающего момента будет значительная, пропорциональная квадрату напряжения сети. Таким образом, двигатель развивает значительный вращающий момент (2, 2—3, 5 Мном) при небольших значениях частоты вращения п;
в) при уменьшении величины - M вначале растет медленно, а затем—быстро.