

Фундаментальная система решений линейного однородного уравнения
Определение.
Любые
![]() линейно независимых решений линейного
однородного дифференциального уравнения
-ного
порядка называется фундаментальной
системой решений
этого уравнения.
линейно независимых решений линейного
однородного дифференциального уравнения
-ного
порядка называется фундаментальной
системой решений
этого уравнения.
Из предыдущих теорем сразу следует еще одна важная теорема.
Теорема
7.
Решения
![]() уравнения (2) образуют фундаментальную
систему решений этого уравнения тогда
и только тогда, когда их определитель
Вронского
уравнения (2) образуют фундаментальную
систему решений этого уравнения тогда
и только тогда, когда их определитель
Вронского
![]() отличен
от 0 хотя бы в одной точке
отличен
от 0 хотя бы в одной точке
![]() .
.
Доказательство.
Равносильная переформулировка утверждения
теоремы – решения
линейно зависимы тогда и только тогда,
когда
![]() на
на
![]() .
Но это утверждение сразу следует из
теорем 5 и 6.
.
Но это утверждение сразу следует из
теорем 5 и 6.
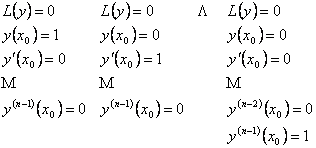
Теорема 8. Для любого линейного однородного дифференциального уравнения (2) существует фундаментальная система его решений.
Доказательство.
Построим такую фундаментальную систему
решений. Для этого возьмем
произвольную
точку
и поставим
различных
задач Коши:
 .
.
По
теореме 1 о существовании и единственности
у каждой из этих задач имеется решение,
и мы обозначим
![]() - решение 1-й задачи,
- решение 1-й задачи,
![]() -
решение 2-й задачи, …,
-
решение 2-й задачи, …,
![]() -
решение
-ной
задачи. Мы получили
-
решения уравнения (2). Найдем
-
решение
-ной
задачи. Мы получили
-
решения уравнения (2). Найдем
![]() для
этих функций:
для
этих функций:
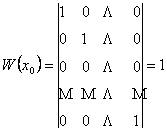 .
Следовательно, по теореме 7, функции
образуют
искомую фундаментальную систему решений
уравнения (2).
.
Следовательно, по теореме 7, функции
образуют
искомую фундаментальную систему решений
уравнения (2).
Теорема
9.
Пусть
- фундаментальная система решений
уравнения (2). Тогда для любого решения
![]() этого уравнения существуют постоянные
этого уравнения существуют постоянные
![]() такие,
что
такие,
что
![]() .
.
Доказательство.
Возьмем произвольную точку
![]() и
рассмотрим систему уравнений относительно
неизвестных
:
и
рассмотрим систему уравнений относительно
неизвестных
:
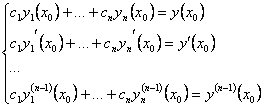 (11).
Определитель этой системы
(11).
Определитель этой системы
![]() не
равен 0, т.к.
не
равен 0, т.к.
![]() - фундаментальная система решений.
Поэтому у нее существует (и притом
единственное) решение
.
Рассмотрим теперь функцию
- фундаментальная система решений.
Поэтому у нее существует (и притом
единственное) решение
.
Рассмотрим теперь функцию
![]() .
По теореме 2 она является решением
уравнения (2). Ввиду равенств (11) значения
этой функции и ее производных до порядка
.
По теореме 2 она является решением
уравнения (2). Ввиду равенств (11) значения
этой функции и ее производных до порядка
![]() включительно
в точке
включительно
в точке
![]() совпадают со значениями
и
ее последовательных производных в точке
.
По теореме 1 о единственности
решения задачи Коши
,
совпадают со значениями
и
ее последовательных производных в точке
.
По теореме 1 о единственности
решения задачи Коши
,
![]() .
.
Замечание. Теоремы 8 и 9 означают, что размерность векторного пространства решений уравнения (2) равна , а любая фундаментальная система решений представляет собой базис этого пространства
значениями и ее последовательных производных в точке . По теореме 1 о единственности решения задачи Коши , .
Замечание. Теоремы 8 и 9 означают, что размерность векторного пространства решений уравнения (2) равна , а любая фундаментальная система решений представляет собой базис этого пространства
Билет №15
Структура общего решения неоднородной системы
Любые n – r линейно независимых решений системы называются ее фундаментальной системой решений.
![]() частное
решение
частное
решение
Билет №16
Линейный оператор в (В линейном пространстве). Матрица линейного пространства
Линейные операторы. Матрица линейного оператора. Примеры линейных операторов.
Определение.
Если
каждому элементу
 ставится в соответствие единственный
элемент
ставится в соответствие единственный
элемент
 ,
то говорят, что в пространстве Rn
задан оператор, действующий в пространстве
Rn.
,
то говорят, что в пространстве Rn
задан оператор, действующий в пространстве
Rn.
Результат
действия оператора A
на элемент
обозначают
 .
.
Если элементы и связаны соотношением , то называют образом элемента ; элемент — прообразом элемента .
Множество элементов пространства Rn, для которых определено действие оператора A, называют областью определения оператора A и обозначают D(A).
Множество
элементов пространства Rn,
которые являются образами элементов
из области определения D(A)
оператора A,
называют образом
оператора
A
и обозначают Im(A).
Если
,
то
 .
.
Ядром оператора называется множество элементов пространства Rn, образом которых является нуле
нулевой
элемент. Ядро оператора обозначают
Ker(A):
 .
.
Определение.
Оператор
A,
действующий в пространстве Rn
называется линейным оператором, если
для любых
 из Rn
и для любого числа α справедливо:
из Rn
и для любого числа α справедливо:
 и
и
 .
.
Определение. Матрица, столбцами которой являются координаты образов соответствующих базисных векторов некоторого базиса в Rn —
называется матрицей линейного оператора
Билет №17
Действия с линейными операторами и их матрицами
Рассмотрим
линейный оператор
![]() ,
действующий в конечномерном линейном
пространстве
,
действующий в конечномерном линейном
пространстве
![]() .
Доказано, что образ
.
Доказано, что образ
![]() линейного
оператора
линейного
оператора
![]() линейное
пространство. Размерность образа
линейного оператора называется рангом
оператора,
обозначается
линейное
пространство. Размерность образа
линейного оператора называется рангом
оператора,
обозначается
![]() .
.
Ядром
линейного оператора
называется множество элементов из
,
образом которых является нулевой
элемент. Ядро оператора обозначают
![]() :
:
![]() .
Ядро линейного оператора
линейное
пространство; размерность ядра линейного
оператора называется дефектом
оператора,
обозначается
.
Ядро линейного оператора
линейное
пространство; размерность ядра линейного
оператора называется дефектом
оператора,
обозначается
![]() :
:
![]() .
.
Для линейного оператора, действующего в n-мерном линейном пространстве , справедливы следующие утверждения:
сумма
ранга и дефекта оператора равно
размерности пространства, в котором
действует оператор:
![]() ;
;
ранг оператора равен рангу его матрицы;
ядро оператора совпадает с множеством решений линейной однородной системы с матрицей , размерность пространства решений этой системы равна дефекту оператора, а ее фундаментальная система решений образует базис в ядре оператора;
столбцы, входящие в базисный минор матрицы оператора образуют базис в образе оператора.
Сформулированные утверждения позволяют описать структуру образа и ядра линейного оператора, заданного матрицей, используя язык матричных преобразований и общей теории линейных систем.
Билет №18
Преобразование координат вектора и матрицы линейного оператора. Их свойства и вычисления.
Пусть
в
![]() -мерном
линейном пространстве
-мерном
линейном пространстве
![]() выбран
базис
выбран
базис
![]() ,
который мы будем для удобства называть
"старый" и другой базис
,
который мы будем для удобства называть
"старый" и другой базис
![]() ,
который мы будем называть "новый".
Возьмем призвольный вектор
,
который мы будем называть "новый".
Возьмем призвольный вектор
![]() из
.
Его координатный столбец в старом базисе
обозначим
из
.
Его координатный столбец в старом базисе
обозначим
 ,
а в новом --
,
а в новом --
 .
Нам нужно выяснить, как связаны друг с
другом координаты в старом и в новом
базисе. Для этого нам сначала нужно
"связать" друг с другом старый и
новый базисы. Запишем разложения новых
базисных векторов по старому базису
.
Нам нужно выяснить, как связаны друг с
другом координаты в старом и в новом
базисе. Для этого нам сначала нужно
"связать" друг с другом старый и
новый базисы. Запишем разложения новых
базисных векторов по старому базису
Составим матрицу, столбцами которой служат координатные столбцы векторов нового базиса
Эта матрица называется матрицей перехода от старого базиса к новому.