

7.1. Система електропривода з сумуючим підсилювачем
Рівняння електромеханічної характеристики двигуна в замкненій системі регулювання залежить від зворотних зв’язків. При цьому стабілізація швидкості може досягатися в системах з від’ємними зворотними зв’язками за швидкістю, напругою і ЕРС, а також з позитивним зворотним зв’язком за струмом двигуна.
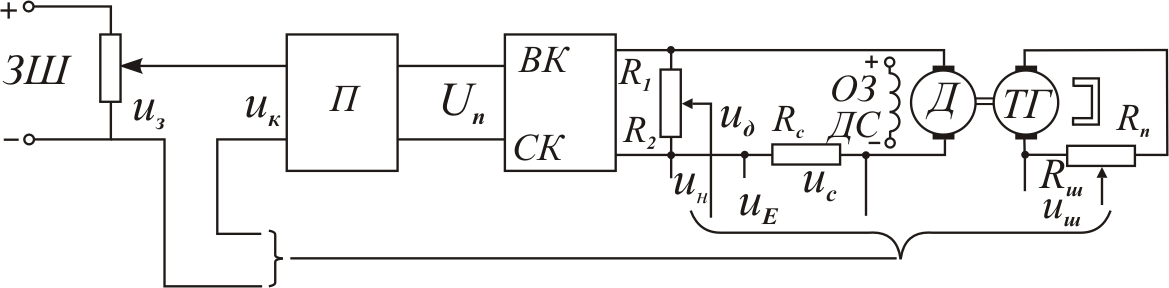
Рис.21.
На
рис.21 наведена узагальнена функціональна
схема системи стабілізації швидкості
двигуна з сумуючим підсилювачем, де
і
![]() якір і обмотка збудження двигуна;
якір і обмотка збудження двигуна;
![]() керований випрямляч з системою керування;
керований випрямляч з системою керування;
![]() сумуючий підсилювач;
сумуючий підсилювач;
![]() задавач швидкості;
задавач швидкості;
![]() відповідно напруги задавача швидкості,
керування підсилювачем і перетворювачем,
а також напруги зворотних зв’язків за
напругою
відповідно напруги задавача швидкості,
керування підсилювачем і перетворювачем,
а також напруги зворотних зв’язків за
напругою
![]() ,
струмом
,
струмом
![]() ,
ЕРС
,
ЕРС
![]() і швидкістю двигуна
і швидкістю двигуна
![]() .
.
Маючи рівняння електромеханічної характеристики такої узагальненої системи, легко буде записати рівняння електромеханічної характеристики системи при дії окремих зворотних зв’язків або їх будь-якої комбінації. Тому наводимо рівняння, якими описується електромеханічна характеристика узагальненої системи:
 /90/
/90/
де
![]()
![]() коефіцієнти передачі підсилювача і
силового перетворювача;
коефіцієнти передачі підсилювача і
силового перетворювача;
![]() еквівалентний опір перетворювача;
еквівалентний опір перетворювача;
![]()
![]()
![]()
![]() коефіцієнти зворотних зв’язків за
напругою, струмом, ЕРС і швидкістю
двигуна.
коефіцієнти зворотних зв’язків за
напругою, струмом, ЕРС і швидкістю
двигуна.
Розв’язавши систему рівнянь /90/ відносно швидкості, одержують рівняння електромеханічної характеристики узагальненої системи
![]() ,
/91/
,
/91/
де .
Увага! Студенти в пояснювальній записці до курсового проекту систему рівнянь /90/ записують для свого варіанта завдання. Потім наводять розв’язок цієї системи і звіряють свої результати з рівнянням /91/, за умови рівності нулю відповідних коефіцієнтів.
Вихідними
даними для розрахунків коефіцієнтів,
які входять в рівняння /91/, є задані
технічними умовами діапазон регулювання
і статизм нижньої електромеханічної
характеристики. Діапазон регулювання
![]() ,
де
,
де
![]() і
і
![]() швидкості
ідеальних холостих ходів, що відповідають
натуральній і нижній електромеханічній
характеристиці. Нижню межу регулювання
визначає заданий відносний перепад
швидкості, який називається статизмом,
при зміні навантаження від нуля до
номінального. Отже, статизм замкненої
системи регулювання
швидкості
ідеальних холостих ходів, що відповідають
натуральній і нижній електромеханічній
характеристиці. Нижню межу регулювання
визначає заданий відносний перепад
швидкості, який називається статизмом,
при зміні навантаження від нуля до
номінального. Отже, статизм замкненої
системи регулювання
![]() /92/
/92/
Підставивши в рівняння /92/ , одержують
![]() /93/
/93/
Формула /93/ показує, що перепад швидкості на нижній характеристиці залежить від діапазону регулювання і статизму. Ця залежність і є вихідною в подальших розрахунках параметрів систем автоматизованого регулювання з різними зворотними зв’язками.
Розглянемо основні системи стабілізації швидкості електропривода.
7.1.1. Система регулювання зі зворотним зв’язком за швидкістю двигуна
Функціональна схема системи автоматичного регулювання зі зворотним зв’язком за швидкістю наведена на рис.21,а. На ній позначені: ЗШ – задавач швидкості, ПО – сумуючий операційний підсилювач: ВК, СК – керований випрямляч системою керування,
Д – двигун, ТГ –
тахогенератор і подільник напруги
![]() .
.
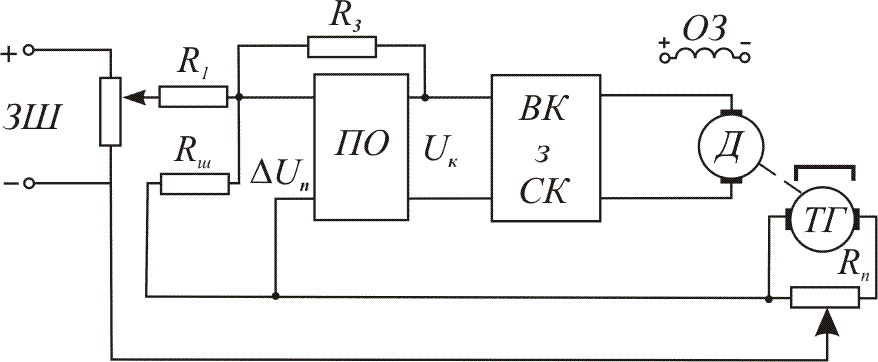
Рис.21,а.
Далі у пояснювальній
записці необхідно навести схему ВК
(рис.17), схему фазо-імпульсного керування
(рис.18), описати роботу системи автоматичного
регулювання швидкості при зміні задаючого
сигналу і зміні навантаження, обчислити
![]() керуючого перетворювача і побудувати
за рівнянням /83/ електромеханічну
характеристику двигуна (рис.16, пряма
1).
керуючого перетворювача і побудувати
за рівнянням /83/ електромеханічну
характеристику двигуна (рис.16, пряма
1).
Для розрахунку коефіцієнтів зворотних зв’язків записують систему рівнянь виду /90/, поводять її розв’язок і отримують рівняння електромеханічної характеристики в замкненій системі регулювання:
![]() ,
/94/
,
/94/
де
![]() коефіцієнт підсилення розімкненої
системи.
коефіцієнт підсилення розімкненої
системи.
Поділивши
перепад швидкості в розімкненій системі
при номінальному навантаженні
![]() на перепад швидкості в замкненій системі
на перепад швидкості в замкненій системі
![]() ,
одержимо формулу для визначення
необхідного коефіцієнта підсилення
розімкненої системи:
,
одержимо формулу для визначення
необхідного коефіцієнта підсилення
розімкненої системи:
![]() або
або
![]() .
/95/
.
/95/
Коефіцієнт
зворотного зв’язку за швидкістю
визначають, виходячи з стандартної
задаючої напруги 10В або 20В, яка має
відповідати швидкості ідеального
холостого ходу
![]() .
Зазвичай, приймають
.
Зазвичай, приймають
![]() .
Тоді, підставивши в /94/
.
Тоді, підставивши в /94/
![]() ,
одержують
,
одержують
![]() /96/
/96/
З /96/ визначають коефіцієнт зворотного зв’язку
![]() /97/
/97/
Коефіцієнт
передачі керованого випрямляча визначають
з уніфікованої характеристики
![]() (рис.19), прийнявши
(рис.19), прийнявши
![]() рівною номінальній напрузі двигуна і
рівною номінальній напрузі двигуна і
![]() .
.
Коефіцієнт
передачі керованого випрямляча
вираховують із умови роботи привода на
мінімальній швидкості. За цієї умови
![]() ;
;
![]() і
і
![]() згідно графіка відповідає
згідно графіка відповідає
![]() .
Тоді
.
Тоді
![]() ,
/97, а/
,
/97, а/
де
![]() напруга керування, яка відповідає
напруга керування, яка відповідає
![]() згідно рис.19.
згідно рис.19.
Для
забезпечення заданого статизму
![]() необхідно вибирати сумуючий підсилювач
з коефіцієнтом підсилення
необхідно вибирати сумуючий підсилювач
з коефіцієнтом підсилення
![]() .
/98/
.
/98/
Для
реалізації зворотного зв’язку за
швидкістю підбирають за каталогом [Л.2,
т.2, с.430, табл. 26.15] тахогенератор з
постійними магнітами за умов
![]() і
і
![]() .
Технічні дані тахогенератора виписуються
з довідника.
.
Технічні дані тахогенератора виписуються
з довідника.
Зазвичай,
напруга тахогенератора більша напруги
давача
![]() .
Тому напругу
одержують за допомогою подільника
напруги тахогенератора. Опір подільника
.
Тому напругу
одержують за допомогою подільника
напруги тахогенератора. Опір подільника
![]() /99/
/99/
де
![]() струм якоря тахогенератора. Опір
подільника приймають дещо більшим
розрахункового, наприклад
струм якоря тахогенератора. Опір
подільника приймають дещо більшим
розрахункового, наприклад
![]() .
Тоді опір резистора
.
Тоді опір резистора
![]() Опір резистора
Опір резистора
![]() .
.
Щоби
струм у колі зворотного зв’язку не
зумовлював нелінійність, більшу 1%, опір
кола зворотного зв’язку повинен бути
більшим за опір
![]() в 25 разів. При такому опорі в колі
зворотного зв’язку буде протікати
струм
в 25 разів. При такому опорі в колі
зворотного зв’язку буде протікати
струм
![]() .
За цієї умови струм в резисторі подільника
.
За цієї умови струм в резисторі подільника
![]() .
.
Для
вибору резисторів за каталогом необхідно
визначити їх потужності за формулою
![]() .
.
Побудова граничних електромеханічних характеристик.
Підставивши
в /94/
![]() ,
одержують рівняння електромеханічної
характеристики в замкненій системі
регулювання.
,
одержують рівняння електромеханічної
характеристики в замкненій системі
регулювання.
Рівняння
нижньої граничної характеристики
отримують, підставивши в /94/
![]() .
На рис. 16 показані граничні характеристики
.
На рис. 16 показані граничні характеристики
![]() (прямі 2 і 3).
(прямі 2 і 3).