

7.3. Системи регулювання з сумуючим підсилювачем і задавачем інтенсивності
В системах автоматичного регулювання швидкості з великим коефіцієнтом підсилення при пусках і гальмуванні двигуна, коли задаюча напруга змінюється стрибком, виникають великі струми. Одним із засобів обмеження цих струмів є плавна зміна задаючої напруги, що може здійснити задавач інтенсивності (ЗІ).
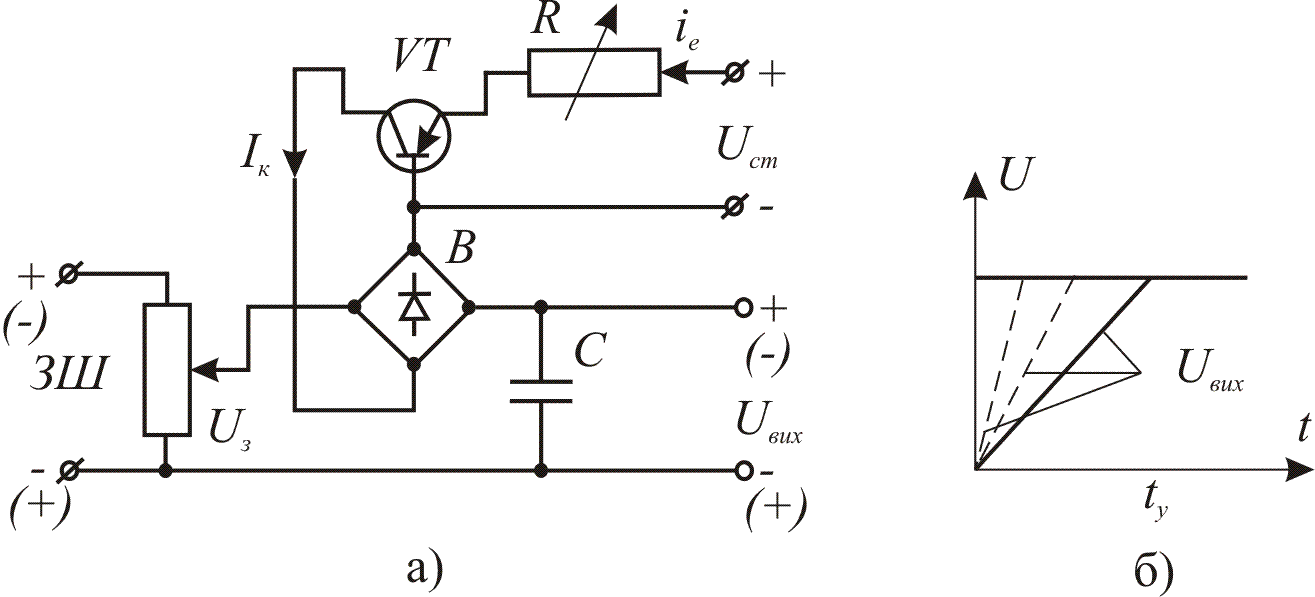
Рис.28.
На
рис.28.а показана одна із схем ЗІ. На вхід
ЗІ через випрямляч В подається задаюча
напруга
![]() ,
яка живить коло колектора транзистора
VT. Транзистор VT
увімкнено за схемою зі спільною базою.
Емітерне коло VT живиться
від стабілізованої напруги
,
яка живить коло колектора транзистора
VT. Транзистор VT
увімкнено за схемою зі спільною базою.
Емітерне коло VT живиться
від стабілізованої напруги
![]() .
Струм емітера
.
Струм емітера
![]() залежить від струму колектора
залежить від струму колектора
![]() ,
який у цій схемі включення VT
практично не залежить від напруги на
колекторі. Тому при вмиканні напруги
,
який у цій схемі включення VT
практично не залежить від напруги на
колекторі. Тому при вмиканні напруги
![]() процес зарядки конденсатора С
відбувається сталим струмом. Це призводить
до того, що напруга на конденсаторі С,
яка є вихідною напругою ЗІ, практично
змінюється в часі лінійно від нуля до
значення
процес зарядки конденсатора С
відбувається сталим струмом. Це призводить
до того, що напруга на конденсаторі С,
яка є вихідною напругою ЗІ, практично
змінюється в часі лінійно від нуля до
значення
![]() .
Знак вихідної напруги
.
Знак вихідної напруги
![]() співпадає зі знаком задаючої
.
При зміні знака
колекторний струм транзистора не змінює
свого напрямку завдяки випрямлячу В.
співпадає зі знаком задаючої
.
При зміні знака
колекторний струм транзистора не змінює
свого напрямку завдяки випрямлячу В.
Змінюючи струм емітера резистором R, можна регулювати інтенсивність наростання вихідної напруги (рис.28,б) і забезпечити необхідну інтенсивність розгону двигуна.
Розрахунок параметрів систем автоматичного регулювання швидкості і обмеження струму з задавачем інтенсивності такий же самий, як і систем регулювання без нього. На функціональних схемах лише необхідно додатково показати ЗІ і описати його роботу в пояснювальній записці.
7.4. Системи регулювання з широтно-імпульсним перетворювачем
Обмеження струму в цих системах здійснюється такими ж засобами, як і в системах з сумуючим підсилювачем. Тому розрахунки параметрів систем обмеження струму виконують аналогічно.
8. Формування динамічних характеристик електропривода
Динамічні характеристики будь-якої системи регулювання представляють собою реакцію системи на стрибкоподібну зміну задаючого сигналу чи збурення. Стосовно автоматизованого електропривода це буде зміна швидкості двигуна, зумовлена миттєвою зміною задаючої напруги чи моменту сил опору (ударне навантаження), і кількісно буде описуватись диференціальним рівнянням системи регулювання при дії вказаних зовнішніх впливів.
Отже, для формування бажаних динамічних процесів необхідно знати диференціальне рівняння системи і мати засоби зміни коефіцієнтів цього рівняння, щоби в системі протікали процеси, близькі до технічно-оптимальних, тобто таких, коли час перехідного процесу буде мінімально можливим і перерегулювання не перевищить 8%.
Узагальнена системи
стабілізації швидкості з сумуючим
підсилювачем в усталеному режимі
описується системою рівнянь /90/. Щоб
описати цю ж систему в динамічних
режимах, необхідно ці рівняння доповнити
членами, які визначають зміну енергії
в її ланках. Тому при зміні задаючої
напруги
![]() і моменту навантаження
і моменту навантаження
![]() маємо наступну систему рівнянь:
маємо наступну систему рівнянь:
![]()
![]()
![]() /132/
/132/


де
![]() стала часу керованого випрямляча, яка
враховує інерційність системи
імпульсно-фазового керування;
стала часу керованого випрямляча, яка
враховує інерційність системи
імпульсно-фазового керування;
![]() стала часу якорного кола;
стала часу якорного кола;
![]() індуктивність трансформатора;
індуктивність трансформатора;
![]() індуктивність згладжуючого реактора;
індуктивність згладжуючого реактора;
![]() стала часу якоря;
зведений
до вала двигуна момент інерції привода.
стала часу якоря;
зведений
до вала двигуна момент інерції привода.
На підставі системи рівнянь /132/ знаходять рівняння, якими описуються перехідні процеси в системах з різними зворотними зв’язками.