

10. Обмеження струму в системах підпорядко-ваного регулювання
Обмеження струму в цих системах здійснюється шляхом обмеження сигналу на вході регулятора струму. Для цього в коло зворотного зв’язку регулятора швидкості вмикають стабілітрони і як показано на рис.29. Аналогічно вмикають стабілітрони і в колі зворотного зв’язку П- регулятора швидкості.
Величину
напруги стабілізації стабілітронів
![]() визначають з рівняння
визначають з рівняння
![]() ,
задавшись величиною стопорного струму
,
задавшись величиною стопорного струму
![]() .
На рис.32 наведені електромеханічні
характеристики двигуна з обмеженням
струму. Змінюючи напругу
,
можна регулювати величину струму
обмеження
.
На рис.32 наведені електромеханічні
характеристики двигуна з обмеженням
струму. Змінюючи напругу
,
можна регулювати величину струму
обмеження
![]() .
.
Система підпорядкованого регулювання з задавачем інтенсивності. Методика розрахунків параметрів всіх ланок системи підпорядкованого регулювання з задавачем інтенсивності така сама як і система підпорядкованого регулювання без задавача, але не потрібно використовувати інерційну ланку для зменшення перерегулювання при стрибкоподібній зміні вхідного сигналу.
Тому після виконання необхідних розрахунків потрібно описати схему і принцип дії задавача інтенсивності (див.п.7.7.), який дозволяє регулювати прискорення при зміні задаючого сигналу. Величину кутового прискорення в першому наближенні розраховують на підставі рівняння руху електропривода:
![]() .
/160/
.
/160/
Підставивши
в /160/
![]() ,
одержують
,
одержують
![]() .
/161/
.
/161/
З
/161/ видно, що регулювання прискорення
досягається зміною струму якоря при
![]() .
При
.
При
![]() і
і
![]() прискорення буде максимальним і рівним
прискорення буде максимальним і рівним
![]() .
/162/
.
/162/
 При
При
![]() прискорення
прискорення
![]() буде меншим
буде меншим
![]() .
Якщо в завданні на проектування
прискорення електропривода при пуску
не обмежене, розрахунок швидкості
наростання напруги на виході задавача
інтенсивності приймають рівною
.
.
Якщо в завданні на проектування
прискорення електропривода при пуску
не обмежене, розрахунок швидкості
наростання напруги на виході задавача
інтенсивності приймають рівною
.
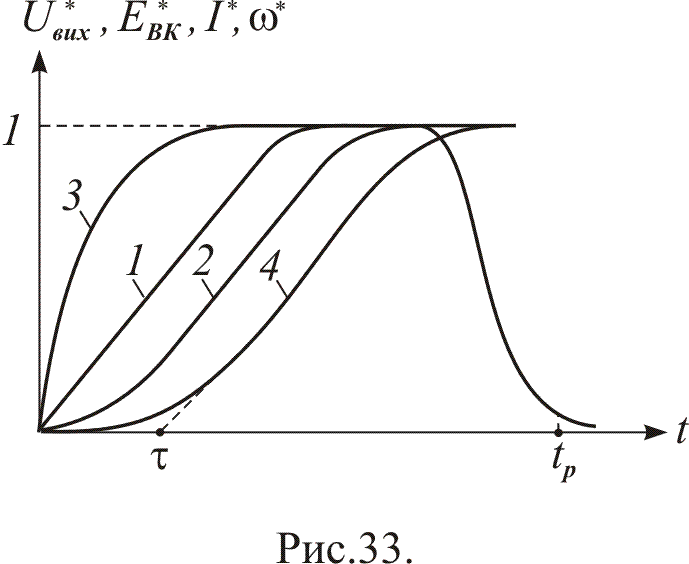
На
рис.33 наведені у відносних одиницях
зміни напруги на виході задавача
інтенсивності (крива 1), ЕРС силового
перетворювача (крива 2), струму якоря
(крива 3) і швидкості двигуна (крива 4). З
наведених кривих видно, що при лінійному
наростанні напруги на виході задавача
інтенсивності кутова швидкість двигуна
буде змінюватись, в основному, за лінійним
законом з запізненням
![]() ,
яке залежить від сталих часу ланок і
коефіцієнтів зворотних зв’язків
,
яке залежить від сталих часу ланок і
коефіцієнтів зворотних зв’язків
В
пояснювальній записці потрібно навести
розрахунки
і наближено побудовані криві
![]() ,
,
![]() і
і
![]() .
.
Оскільки
задавач інтенсивності обмежує струм
тільки при зміні задаючої напруги, то
при зміні навантаження струм якоря може
перевищити допустиме значення
![]() .
Тому необхідно провести розрахунки
обмеження струму як і в системі
підпорядкованого регулювання без
задавача інтенсивності, прийнявши
.
Тому необхідно провести розрахунки
обмеження струму як і в системі
підпорядкованого регулювання без
задавача інтенсивності, прийнявши
![]() .
.
11. Моделювання динамічних процесів
Математичне моделювання дозволяє досліджувати перехідні процеси в системі автоматизованого електропривода за допомогою комп’ютера. Метод базується на ідентичності диференціальних рівнянь, якими описується динаміка системи, і математичної моделі, яка досліджується на комп’ютері.
Із багатьох методик розв’язання диференціальних рівнянь за допомогою комп’ютера найменше працемістким і наочним є структурний метод, коли набір задачі на комп’ютері виконують за структурною схемою досліджуваної системи, де кожна ланка представлена своєю передавальною функцією. Зокрема, можуть бути використані спеціалізований пакет MATLAB Simulink або програма SIAM.
При
моделюванні досліджуються залежності
швидкості (t)
і струму I(t) при стрибкоподібній зміні
задаючої напруги і
![]() =0. Потім досліджуються ці ж змінні при
обмеженні струму.
=0. Потім досліджуються ці ж змінні при
обмеженні струму.
Структурну схему електропривода з сумуючим підсилювачем і зворотним зв’язком за швидкістю при зміні керуючого впливу доцільно представити у вигляді, наведеному на рис.34.
Оскільки
реалізувати ідеальну диференціюючу
ланку
![]() при моделюванні неможливо, то її замінюють
реальною з передавальною функцією
при моделюванні неможливо, то її замінюють
реальною з передавальною функцією
![]() ,
де
,
де
![]() - найменша стала часу в контурі регулювання.
- найменша стала часу в контурі регулювання.
Щоб не допустити помилок при моделюванні на структурній схемі (рис.34) вказують числові значення всіх коефіцієнтів і сталих часу.
Аналогічно представляють структурні схеми електроприводів зі зворотним зв’язком за ЕРС двигуна та зі зворотними зв’язками за напругою і струмом.
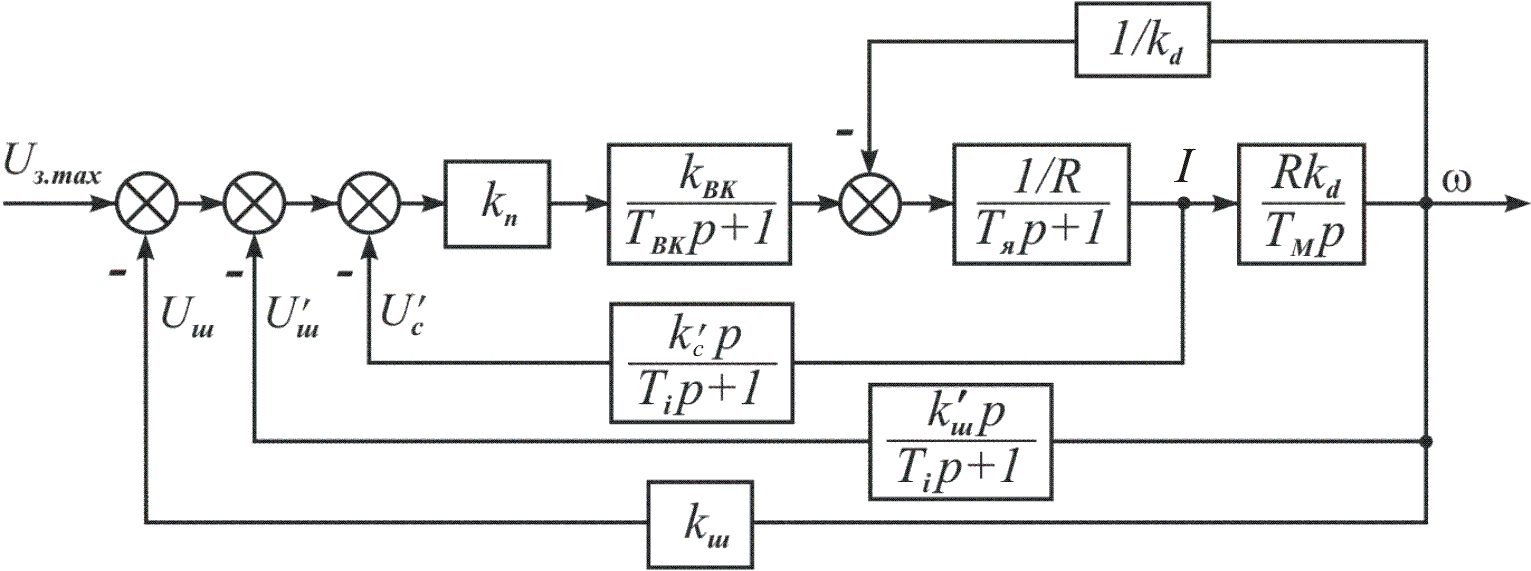
Рис.34.
При
=0
струм двигуна зв’язаний зі швидкістю
рівнянням
![]() .
.
Структурна схема автоматизованого електропривода з затриманим зворотним зв’язком за струмом і задавачем інтенсивності наведена на рис.35.
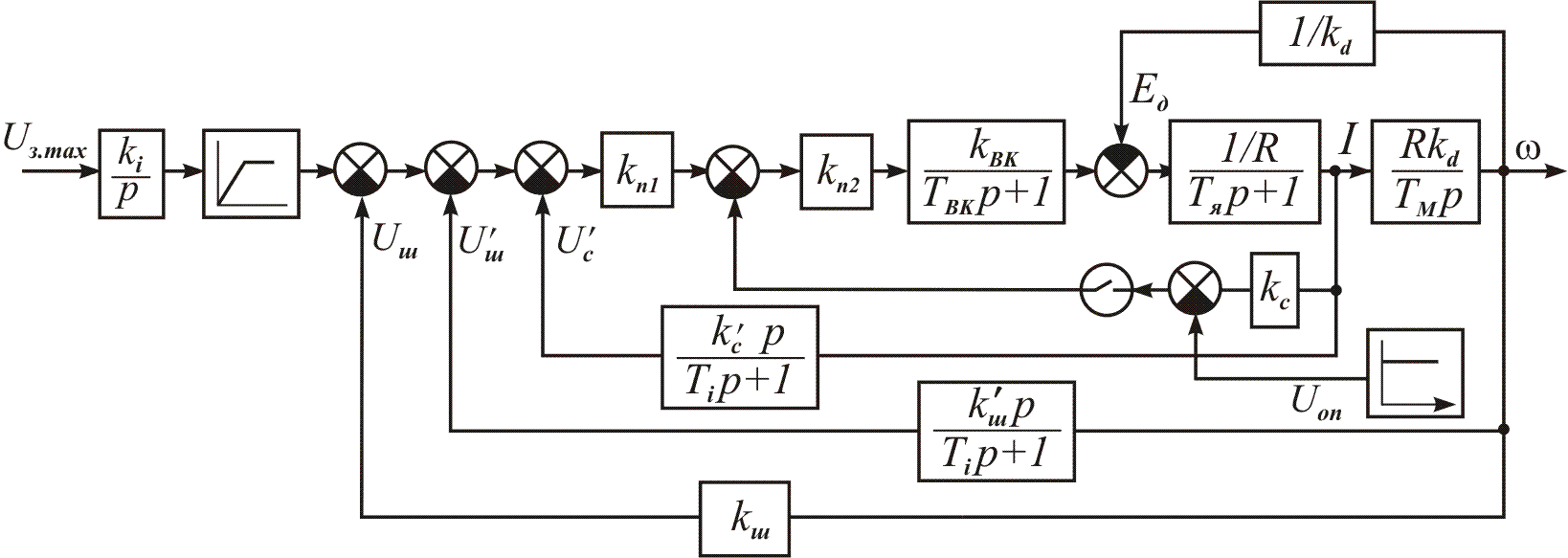
Рис.35.
Затриманий
зворотний зв’язок за струмом моделюють
згідно схеми, зображеної на рис.24,б. Її
реалізують за допомогою ланки опорної
напруги, порівняльної ланки і електронного
ключа, який спрацьовує при
![]() .
.
Задавач інтенсивності моделюють інтегруючою ланкою з обмеженням. Моделювання динамічних процесів в системах електропривода з підпорядкованим регулюванням здійснюють на підставі структурної схеми, наведеної на рис.31, вказавши на ній числові значення розрахункових параметрів.
Оскільки
обмеження струму в системах з
підпорядкованим регулюванням досягається
обмеженням напруги на виході регулятора
швидкості, то при моделюванні це
реалізують за допомогою пропорційної
ланки з
![]() і обмеженням, яку вмикають на виході
регулятора швидкості.
і обмеженням, яку вмикають на виході
регулятора швидкості.
На підставі результатів моделювання [графіків (t) і I(t)] визначають показники якості регулювання і порівнюють їх з заданими.