

Использование трехмерных моделей для расчета изделий методами имитационного моделирования
Имитационное моделирование заключается в создании модели проектируемого объекта и экспериментирования с ней при реальных условиях и ограничениях.
Имитация в САПР осуществляется путем создания модели проектируемого объекта и наблюдения за его функционированием до реального его изготовления с целью нахождения его рациональных параметров. Различают кинематическую и динамическую имитацию.
Кинематическая имитация осуществляется с целью проверки работоспособности объекта в процессе движения его элементов (проверка коллизий, например, столкновений). Примеры: контрольные сборки, работа движущегося механизма.
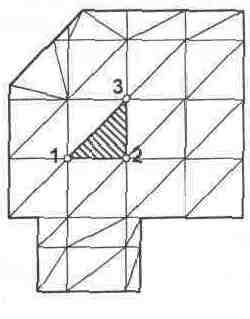
Динамическая имитация осуществляется путем исследования поведения объекта при изменении действующих на него нагрузок и температур. Определяются теплонапряженное состояние и деформации элементов объекта. Применение при таких расчетах аналитических моделей, полученных методами математической физики, применительно к сложным по конфигурации объектам, в настоящее время невозможно, так как при этом необходимо принимать ограничения, которые зачастую нарушают адекватность математической модели объекта. Поэтому для решения задач динамической имитации в САПР используют приближенные методы: метод конечных элементов (МКЭ) и метод конечных разностей (МКР). Как показала практика, МКЭ является самым эффективным методом решения задач имитационного моделирования в САПР. В основе этого метода лежит представление объекта исследования в виде набора некоторых простых с геометрической точки зрения фигур, называемых конечными элементами, взаимодействующими между собой только в узлах. Расположенные определенным образом (в зависимости от конструкции объекта) и закрепленные в соответствии с граничными условиями конечные элементы, форма которых определяется особенностями моделируемого объекта, позволяют описать все многообразие механических конструкций и деталей.
При выполнении инженерных расчетов на прочность неизбежен этап создания моделей прочностной надежности элементов конструкций. С помощью таких моделей возможно выбрать материал и необходимые размеры конструкций и оценить ее сопротивление внешним воздействиям.
Надежностью называют свойство изделия выполнять свои функции в заданных пределах в течение требуемого промежутка времени. Прочностной надежностью называют отсутствие отказов, связанных с разрушением или с недопустимыми деформациями, или, вообще, с наступлением предельного состояния в определенном смысле. Основной мерой надежности является вероятность безотказной работы изделия.
Другой, более распространенной величиной оценки прочностной надежности является запас прочности. Пусть р — параметр работоспособности изделия (например, действующее усилие, давление, эквивалентное напряжение в опасной точке и т. п.). Тогда запасом прочности называют отношение
n =
![]()
где Ркр—критическое (предельное) значение параметра Р , нарушающее нормальную работу изделия, Рмах — наибольшее значение параметра в рабочих условиях. Условие прочностной надежности записывается в виде:
n
![]() [n],
[n],
где [n] — допустимое значение запаса прочности. Допустимый запас прочности назначают на основании инженерного опыта эксплуатации подобных конструкций (прототипов). Ряд отраслей техники имеют нормы прочности, в которых допустимые запасы прочности регламентированы для разных условий эксплуатации. Обычный диапазон изменений [n] колеблется от 1, 3 (при стабильных условиях нагружения) до 5 и более (при переменных и динамических нагрузках). В практике расчетов используют как аналитические, так и численные методы. Первые базируются на математических методах решения краевых задач, обычно сложных и трудоемких, и зачастую ограничены достаточно простыми геометрическими формами тел и схем нагружения. Численные методы, к которым относятся, в частности, метод конечных разностей, метод граничных интегральных уравнений, метод граничных элементов, метод конечных элементов и другие методы, напротив, не ограничены ни формой тел, ни способом приложения нагрузки. Это, наряду с повсеместным распространением мощной вычислительной техники, способствует их распространению в инженерной среде.
Основная идея метода конечных элементов состоит в том, что любую непрерывную величину (перемещение, температура, давление и т. п.) можно аппроксимировать моделью, состоящей из отдельных элементов (участков).
Объект представляется в виде набора простых (с геометрической точки зрения) фигур, называемых конечными элементами (для плоской задачи-прямоугольники, треугольники, для объемной задачи-параллепипеды, призмы, тетраэдры), которые взаимодействуют между собой в узлах. Элементы могут быть линейными и параболическими (имеющие узлы в серединах ребер). На каждом из этих элементов исследуемая непрерывная величина аппроксимируется кусочно-непрерывной функцией, которая строится на значениях исследуемой непрерывной величины в конечном числе точек рассматриваемого элемента. Для этого используются линейная (первого порядка) или параболическая (второго порядка) функции.
К узлам прикладываются граничные условия: кинематические (закрепления, перемещения) и статические (нагрузки), в результате чего тело деформируется. Условие равновесия каждого элемента:
Р=[Kэ]U,
где Р-вектор усилий, U-вектор перемещений, [Kэ]-матрица жесткости конечного элемента, в которую входят модуль упругости (Юнга) E, характеризующий сопротивление материала упругой деформации (отношение напряжения к вызванной им упругой деформации) и коэффициент Пуассона μ (отношение поперечной деформации к продольной).
Матрицы жесткости всех конечных элементов объединяются в глобальную матрицу жесткости [K], перемещения и усилия в узлах объединяются соответственно в общие столбцы перемещений [U] и усилий [P].
В результате создается система линейных уравнений, в которой неизвестными являются перемещения:
[U] = [K] [P]
Решается система уравнений с вычислением перемещений каждого узла. Это стало возможным, когда в 1963 г. было доказано, что этот МКЭ можно рассматривать как один из вариантов известного в строительной механике метода Рэлея—Ритца, который путем минимизации потенциальной энергии позволяет свести задачу к системе линейных уравнений равновесия. То есть полученное решение соответствует минимуму потенциальной энергии деформированной упругой системы.
Перемещения связаны с соответствующими напряжениями законом Гука:
σ=[E] ε
Для визуальной оценки полученных результатов расчета распределение значений полученных параметров (напряжений, деформаций) представляется в виде изолиний (на которых значение параметра постоянно), цвет и насыщенность которых изменяется в зависимости величины параметра. Кроме того, для визуальной качественной оценки деформированного состояния объекта, деформации показываются искаженно.
Такое представление рассматриваемого объекта позволяет решать задачи расчета напряженного и деформированного состояний тела, устойчивости и динамики, нахождения частот и амплитуд собственных и вынужденных колебаний.
Программное обеспечение для решения задач методом МКЭ должно включать в себя следующие элементы: редактор разбивки на конечные элементы, ядро, непосредственно обеспечивающее решение, и визуализатор для демонстрации полученных результатов.
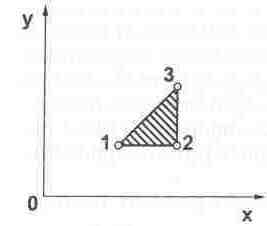
Рассмотрим конечный элемент, координаты узлов
которого равны
![]() и
и
![]() .
После приложения внешней нагрузки тело
деформируется, и каждая внутренняя
точка этого элемента с координатами
х,у занимает новое положение, перемещаясь
в направлении координатных осей х и у
соответственно на расстояния u(х,у)
и v(x,y), причем в пределах одного конечного
элемента эти перемещения представляются
в виде линейных функций координат:
.
После приложения внешней нагрузки тело
деформируется, и каждая внутренняя
точка этого элемента с координатами
х,у занимает новое положение, перемещаясь
в направлении координатных осей х и у
соответственно на расстояния u(х,у)
и v(x,y), причем в пределах одного конечного
элемента эти перемещения представляются
в виде линейных функций координат:
![]()

, (1)
![]()
или, в матричной форме,
![]() , (2)
, (2)
где
![]() ;
;
![]() ;
;
![]() .
.
Необходимо отметить, что задание
перемещений в виде линейных функций
(1) обеспечивает сшивку этих функций на
границах соседних элементов, так как
линейность перемещений в узлах означает
и их линейность везде вдоль границы
элемента.Подставляя в (2) координаты
узловых точек, получаем:![]()
 ,
,
или
![]() ,
(3)
,
(3)
где
![]() .
.
В системе уравнений (3) в качестве
неизвестных можно рассматривать
постоянные коэффициенты
![]() .
Разрешая (3) относительно
с помощью формул Крамера, имеем:
.
Разрешая (3) относительно
с помощью формул Крамера, имеем:
 (4)
(4)
Здесь
![]() - определитель матрицы системы, численно
равный площади конечного элемента:
- определитель матрицы системы, численно
равный площади конечного элемента:

Заметим, что тот же самый результат (4)
получается и другим способом: поскольку
определитель матрицы отличен от нуля,
то единственное решение системы (3) есть
произведение обращенной матрицы системы
и вектора
![]() Подстановка (4) в (3) приводит к выражению
для определения поля перемещений
произвольной точки данного конечного
элемента:
Подстановка (4) в (3) приводит к выражению
для определения поля перемещений
произвольной точки данного конечного
элемента:
![]() (5)
(5)
где
![]() а
остальные коэффициенты находятся путем
циклической перестановки индексов 2 и
3. В матричной форме (5) переписывается
как:
а
остальные коэффициенты находятся путем
циклической перестановки индексов 2 и
3. В матричной форме (5) переписывается
как:
![]() (6)
(6)
Функция
![]() ,
имеющая вид:
,
имеющая вид:
![]() (7)
(7)
называется функцией формы.
Компоненты вектора - столбца
![]() относительной деформации связаны с
перемещениями соотношениями:
относительной деформации связаны с
перемещениями соотношениями:

С другой стороны, используя (6) и (7), можно написать
![]() (8)
(8)
где
![]() -
вектор узловых перемещений,
-
вектор узловых перемещений,

![]()
![]() ;
;

Перемещения связаны с соответствующими напряжениями законом Гука, который для случая плоского нагружения записывается в виде:
![]() ,
(9)
,
(9)
где
Уравнение (9) с учетом (6) принимает следующий вид:
![]() (10)
(10)
Воспользуемся выражением для потенциальной энергии деформации элементарного объема (13). Тогда эта энергия, с учетом (10), определится из очевидного уравнения:
![]() .
(11)
.
(11)
Выражение для объема в уравнении (11) представляет собой, в случае плоской задачи, произведение площади конечного элемента на его толщину.
Энергия деформации элемента объема может быть рассчитана иначе - как работа внешних сил. В качестве внешней нагрузки на элемент объема можно принять реакции приложенные к граням этого элемента, тогда:
![]() (12)
(12)
Из уравнения (12) легко определить реакции, выполнив ряд очевидных сокращений, тогда
![]() (13)
(13)
где
![]() . (14)
. (14)
Уравнение (13) представляет собой обычное
уравнение равновесия, а матрица
![]() является квадратной размерности 6х6.
Она называется матрицей жесткости
конечного элемента,
является квадратной размерности 6х6.
Она называется матрицей жесткости
конечного элемента,
Элементы этой матрицы получаются решением матричного уравнения (14):
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Глобальная матрица жесткости может
быть найдена поэлементным суммированием
матриц жесткости отдельных элементов
и имеет размерность
![]() ,
где N - общее
количество узлов разбиения.
,
где N - общее
количество узлов разбиения.
Левую часть уравнения равновесия (13)
составляет вектор силовых факторов
![]() ,
компоненты которого в количестве
,
компоненты которого в количестве
![]() равны силам, действующим в узлах. Учет
распределенной нагрузки производится
равномерным ее распределением по узлам,
расположенным на границе.
равны силам, действующим в узлах. Учет
распределенной нагрузки производится
равномерным ее распределением по узлам,
расположенным на границе.